








ロボホッパー受信機の信号を少し調べてみました
モーターに出ている信号は下のオシロの通りでフルスロットルでも100%は出ていません、又ラダーモーターも余裕あるのか、トリム一杯ラダー一杯でも70%くらいしか出ていません、



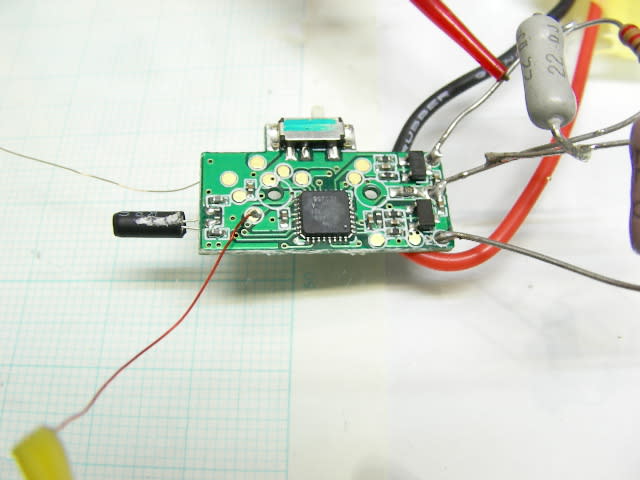
他の端子も色々見て見ましたが、最初の写真の赤い線を引き出している所が、
2.4G受信機ICから、PIC?マイコンに信号を渡している所みたいです。
ビデオで撮ってみました。
どうも下のような感じです。
しかしこれ以上は私のおんぼろオシロでは早くて見えません、どうした物か.....

モーターに出ている信号は下のオシロの通りでフルスロットルでも100%は出ていません、又ラダーモーターも余裕あるのか、トリム一杯ラダー一杯でも70%くらいしか出ていません、
他の端子も色々見て見ましたが、最初の写真の赤い線を引き出している所が、
2.4G受信機ICから、PIC?マイコンに信号を渡している所みたいです。
ビデオで撮ってみました。
どうも下のような感じです。
しかしこれ以上は私のおんぼろオシロでは早くて見えません、どうした物か.....










品番もわからない受信ICの出力だけで、解析するより、2.4G用ICのデータシートを見たほうが良いでしょう、
ラダーの信号からラダー用のPWM信号作るだけで
飛行機は飛びますし、
頭のデータ解析はたいへんです
スロットルの上がり方がバイナリーデータで繰り上がっているかなと思いました。
ラダーもメカトンボはトリム自体は独立していなくてトリムを触るとラダー自体の値が変わっていました。
少し気になったのは前の信号がイニシャライズごとに変わるのかどうかですね。 送ってくる情報には識別IDと別にチャンネル情報も有りそうで その当たりは最初のイニシャライズの信号見ないと何とも言えませんね。
今後の記事が楽しみです ^^
頭の部分はIDとか、周波数の確認とかややこしいことに使っているように思います、
最後はチェックサムかな?それにしては動かないけど
ミニウムの受信機を見てみたい気がしてきました
3CHだとどうなっているのかな?
毎回同じですよね。
先日お話ししていましたメカトンボも同じように出ています。
これが変換できたら 私のメカトンボも動くかなぁ~
どんどん楽しくなってきますね ^^