








[科学太郎]です。
今回は個人ロボットの感情アニメーション(4)について紹介します。これはLEDマトリックスを利用してもっと目が回る動作をアニメーションで表現します。LEDマトリックスや電光掲示板については[目と口の表情アルゴリズム]の記事を読んで下さい。LEDマトリックスで目と口の表情を表現します。説明の都合上でLEDの個数を減らして目は3×3=9個、口は5×3=15個とします。実際にはもっと多くのLEDで表現する事になります。感情アニメーションは[基本表情]と組み合わせることで人間に近い感情や表情を演出できます。例えばロボットの目の前で指で時計回りの動作を繰り返します。するとロボットのCCDカメラは画像認識機能より人間の指先を自動的に追いかけます。そのうちにロボットに目が回る表現をさせます。あまり繰り返すと怒りポイントを上昇させたり、人間の指先を追いかけなくなるように学習機能とも組み合わせます。最初は無邪気な子供や猫のように指先を目で追いかけますから目が回るのです。(戻る)
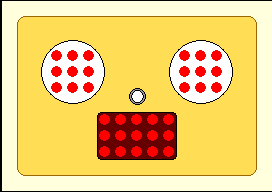
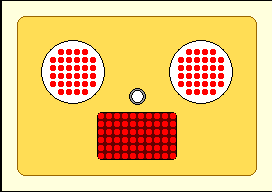
LED少ない(目は3×3=9個、口は5×3=15個) LED多い(目は6×6=36個、口は10×6=60個)
私[科学太郎]が想定してる個人ロボットは人間の子供(4歳~5歳)の知性と判断力を持ってる擬似人工知能システム搭載型のロボットです。今回はLEDマトリックスという方式で感情を目と口で表現し、音声合成と組み合わせることで人間味のあるロボットを紹介します。なお、開発コストで金額を無視できるなら白黒のモノカラーLCD(液晶パネル)で眼球と黒目を表現します。他にも最新技術の有機ELディスプレイのフルカラーで眼球と黒目を表現すると非常に綺麗な表現が可能です。今後はLCD(液晶パネル)に取って代わる次世代のディスプレイですからロボット産業が本格的にスタートすれば安くなるでしょう。特に大量生産すればコストダウンして技術も向上します。開発者・研究者の皆様には個人ロボットの目や口を表現する専用の有機ELディスプレイを研究・開発して欲しいと思ってます。このブログ記事から今後の商品アイディアの参考にして下さい。それではお互いに頑張りましょう。
もっと目が回るA(4ステップ)
もっと目が回るA(1/4) → もっと目が回るA(2/4)


↑ ↓
もっと目が回るA(4/4) ← もっと目が回るA(3/4)


- 左目と右目をずらして時計回りにする事で目が回る表現をします。
- 人間の命令により[横に回れ][縦に回れ][右に転がれ][左に転がれ]などで回転します。
- このときに人間がある回数の回転命令を出し過ぎると目が回る表現をして回転命令を拒否させます。
- 回転拒否から一定時間過ぎると目が回る表現から普通の表現に復帰します。
- 目が回る表現と普通の表現を交互に数回行うともっと目が回る表現をします。
- この場合は長めにもっと目が回る表現をして、普通の表現に復帰しても次の回転命令を数回だけ拒否するようになります。
- また、回転命令を行い過ぎると回転命令履歴より学習アルゴリズムに記録されて、回転拒否、回転を演技として行うようになります。
- しつけ方によっては、回転を演技として楽しんで行ってくれますが、場合によっては数ヶ月間は回転命令を拒否し続けたりもします。
- Aタイプは上下左右の4ステップで目を回します。
もっと目が回るB(8ステップ)
もっと目が回るB(8/8) → もっと目が回るB(1/8)


↑ ↓
もっと目が回るB(7/8) もっと目が回るB(2/8)


↑ ↓
もっと目が回るB(6/8) もっと目が回るB(3/8)


↑ ↓
もっと目が回るB(5/8) ← もっと目が回るB(4/8)


- 左目と右目をずらして時計回りにする事で目が回る表現をします。
- 人間の命令により[横に回れ][縦に回れ][右に転がれ][左に転がれ]などで回転します。
- このときに人間がある回数の回転命令を出し過ぎると目が回る表現をして回転命令を拒否させます。
- 回転拒否から一定時間過ぎると目が回る表現から普通の表現に復帰します。
- 目が回る表現と普通の表現を交互に数回行うともっと目が回る表現をします。
- この場合は長めにもっと目が回る表現をして、普通の表現に復帰しても次の回転命令を数回だけ拒否するようになります。
- また、回転命令を行い過ぎると回転命令履歴より学習アルゴリズムに記録されて、回転拒否、回転を演技として行うようになります。
- しつけ方によっては、回転を演技として楽しんで行ってくれますが、場合によっては数ヶ月間は回転命令を拒否し続けたりもします。
- Bタイプは上下左右の他に左上隅、右上隅、左下隅、右下隅の8ステップで目を回します。






※コメント投稿者のブログIDはブログ作成者のみに通知されます