








- 今日は白ゴミ箱の復旧から。復旧ついでにサーボのアーム角度を調整して釣り糸の遊びを無くして開扉の遅延を減らしてみた。快適。
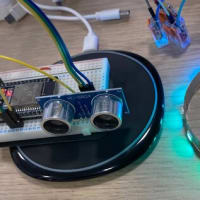
- ゴミ箱の開扉を静電容量センサーにしてみたが、5mmのセンサーでもほぼ触れる位置しか反応しない。超音波センサーが最適解かなあ。
- 白ゴミ箱の開扉を内側からアームで押すようにしてみたんだけど、ゴミを入れにくくなるという致命的な弱点があった。
- 郵便受け届いたらメールシステムについてちょっと調べてみたら重量測定はロードセル+HX711が鉄板ぽい。即ポチしたので到着は明日。
- ゴミ箱のソースコードをリファクタリングしてみた。わりと良い感じに取り回しできた。サーボの制御はメソッド化して正解だった。
- 白ゴミ箱の復旧で釣り糸をまた結んだんだけど、短い糸と元糸を強く引っ張るときに歯を使うと良いことに気付いた。急に釣人っぽくなった。
- グルーガンが調子悪い…素材送りのトリガーがちゃんと噛んでくれないので細いもので後ろから無理やり押し出して凌いだ。まさに一時凌ぎ。
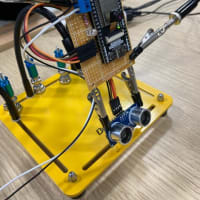
- 次の開発ネタ検討もちょっとだけ。実用性ありそうなとこで回転台の自動化かなあ。ラジコンも気になるけどたぶん結構難しいんよな。

糸の張りっぷりが良い感じ。釣人としてレベル上がったと思う(笑






※コメント投稿者のブログIDはブログ作成者のみに通知されます