








10キープログラミングロボットの進捗状況。
・4x4キーパッドの入力信号をArduino、stm8でシリアル出力できた。
・Arduinoでドレミがならせるようになった。
・距離センサは動いた。
・ボディの仮型はできた。
●プログラミングのスケッチはVBA上では動いた。
という所まで来た。
そこで、はたと気づく。ArduinoNANOの足の数が足りない。
今実験しているものを付けようとすると、
キーパッドで8
モーターで4
スピーカーで1
距離センサで2
合わせて15必要。
ところがArduinoNANOにはデジタルピンが14しかない。
あぁ、無念。
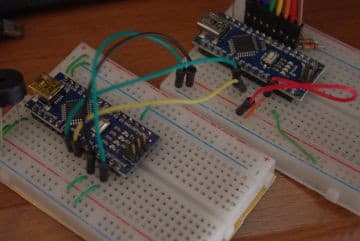
ということで、最大派閥のキーパッド8つを別のArduinoに移してしまおう。
で、キーの値をI2Cでメインに送ればいいのです。
で、やってみました。
ArduinoIDEのスケッチ例をつかって、すぐにできました。
これで完成まであとわずか、と思ったのだけど、ロボットにArduinoNANOを二つ乗せないとならなくなった。
キーパッドの方はstm8にしたいのだけど、I2Cスレイブにする方法が・・・
でも、やる気がなくなるので、とりあえず動くものを作ることを優先させましょう。
次はモーター駆動だな。
これはやったことがあるから、大丈夫なはず。
・4x4キーパッドの入力信号をArduino、stm8でシリアル出力できた。
・Arduinoでドレミがならせるようになった。
・距離センサは動いた。
・ボディの仮型はできた。
●プログラミングのスケッチはVBA上では動いた。
という所まで来た。
そこで、はたと気づく。ArduinoNANOの足の数が足りない。
今実験しているものを付けようとすると、
キーパッドで8
モーターで4
スピーカーで1
距離センサで2
合わせて15必要。
ところがArduinoNANOにはデジタルピンが14しかない。
あぁ、無念。
ということで、最大派閥のキーパッド8つを別のArduinoに移してしまおう。
で、キーの値をI2Cでメインに送ればいいのです。
で、やってみました。
ArduinoIDEのスケッチ例をつかって、すぐにできました。
これで完成まであとわずか、と思ったのだけど、ロボットにArduinoNANOを二つ乗せないとならなくなった。
キーパッドの方はstm8にしたいのだけど、I2Cスレイブにする方法が・・・
でも、やる気がなくなるので、とりあえず動くものを作ることを優先させましょう。
次はモーター駆動だな。
これはやったことがあるから、大丈夫なはず。
















※コメント投稿者のブログIDはブログ作成者のみに通知されます