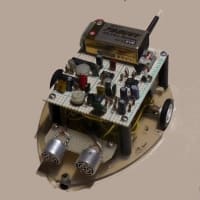
超音波センサーで走り回る『ロボット・マウス』 2019-01-29 19:00:07 | 日記 ■障害物を探知すると、方向転換して走り続けるロボット・マウスです。マイコン搭載型ではなく、論理回路用ロジックICの組み合わせで作っています。機構部分は、市販のタミヤ・キットを活用しています。 #おもちゃ « 昭和30年代に作った『鉱石ラ... | トップ | 電気回転式『ゲーム器』 »
コメントを投稿 goo blogにログインしてコメントを投稿すると、コメントに対する返信があった場合に通知が届きます。 ※コメント投稿者のブログIDはブログ作成者のみに通知されます 名前 タイトル URL ※名前とURLを記憶する コメント ※絵文字はJavaScriptが有効な環境でのみご利用いただけます。 ▼ 絵文字を表示 携帯絵文字 リスト1 リスト2 リスト3 リスト4 リスト5 ユーザー作品 ▲ 閉じる コメント利用規約に同意の上コメント投稿を行ってください。 コメント利用規約に同意する 数字4桁を入力し、投稿ボタンを押してください。 コメントを投稿する















※コメント投稿者のブログIDはブログ作成者のみに通知されます