









TOP画像は以前イプシロンミゼットの足首パーツに、設置性の拡大を図った改造を施したもの、工程に関しましてはこちらから始まる一連の記事をご参照下さい。
イプシロンミゼットのフィギュア自体はかなり可動範囲が広いため、本来であればわざわざこうした加工をせずとも十分な設置性が確保されているわけですが、現在製作している作業メカは股関節の1軸スイング可動のみで1パーツ構成の脚部そのものには可動のためのギミックは設けられていません。
そのため直立不動の体勢の際には安定しているものの、脚を動かした場合バランスはきわめて不安定になります。
これはソフビの人形と同じで、手に持って遊んでいる間はともかく、ポーズを取らせて飾ろうとするとふとした拍子にバタンと倒れることもあるわけです。
こうした不安定さと、ポージングをより柔軟にするために、慣れた人は関節を市販のジョイントパーツ等に差し替えた改造を施したりするのですが、万人がそうした技術を持っているわけではありません。
そこで今回はそうした不安定さによるストレスを極力軽減するための試みを、デザイン段階から施してあります。
…と言っても、そんなに複雑なことをしているわけではなく、冒頭で触れたイプシロンミゼットの足首パーツ改造の記事において述べているのですが、爪先と踵に最初から「角度」を付けておき、可動時の設置面を確保しようと考えたわけです。
…要するに、こういうことですね↓
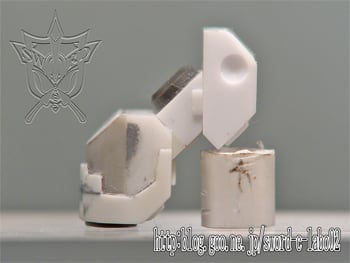

もちろんデザイン上、そんなに大きな面を設けているわけではないのでその効果は微々たるものですが、それでも何の対策をしていないのに比べたらはるかにマシになるのです。
…と、ここまでが先日のうちに出来上がっていた記事内容。
実はこの記事を一時的に保存した直後に、そのデザイン故の構造的な問題点が指摘されているわけです。
それが踵の部分、足首の関節設置基部(くるぶしに当たる部分)の直下にオーバーハングの⊿角が出来ているため直立時に後方への安定性に不安が生じている…といったもの、…簡単に説明すると「後ろにひっくり返る危険性があるよ?」という事です。
一応当面は作業をそのまま続行、最終的な組み立て段階で安定性を検証して不安定に過ぎるようであれば足首パーツの改修、もしくは作り直しを行う予定で保留中。
そうなった場合は最初のコンセプトは残したいのでデザインに頭をひねろうと考えます。
他者の(建設的な)指摘というものがいかに重要か、ということですね。…きっと一人では気づかないですから。
そんなわけで頭の中では検討を続けつつ、次のパーツの製作に移ります…。
イプシロンミゼットのフィギュア自体はかなり可動範囲が広いため、本来であればわざわざこうした加工をせずとも十分な設置性が確保されているわけですが、現在製作している作業メカは股関節の1軸スイング可動のみで1パーツ構成の脚部そのものには可動のためのギミックは設けられていません。
そのため直立不動の体勢の際には安定しているものの、脚を動かした場合バランスはきわめて不安定になります。
これはソフビの人形と同じで、手に持って遊んでいる間はともかく、ポーズを取らせて飾ろうとするとふとした拍子にバタンと倒れることもあるわけです。
こうした不安定さと、ポージングをより柔軟にするために、慣れた人は関節を市販のジョイントパーツ等に差し替えた改造を施したりするのですが、万人がそうした技術を持っているわけではありません。
そこで今回はそうした不安定さによるストレスを極力軽減するための試みを、デザイン段階から施してあります。
…と言っても、そんなに複雑なことをしているわけではなく、冒頭で触れたイプシロンミゼットの足首パーツ改造の記事において述べているのですが、爪先と踵に最初から「角度」を付けておき、可動時の設置面を確保しようと考えたわけです。
…要するに、こういうことですね↓
もちろんデザイン上、そんなに大きな面を設けているわけではないのでその効果は微々たるものですが、それでも何の対策をしていないのに比べたらはるかにマシになるのです。
…と、ここまでが先日のうちに出来上がっていた記事内容。
実はこの記事を一時的に保存した直後に、そのデザイン故の構造的な問題点が指摘されているわけです。
それが踵の部分、足首の関節設置基部(くるぶしに当たる部分)の直下にオーバーハングの⊿角が出来ているため直立時に後方への安定性に不安が生じている…といったもの、…簡単に説明すると「後ろにひっくり返る危険性があるよ?」という事です。
一応当面は作業をそのまま続行、最終的な組み立て段階で安定性を検証して不安定に過ぎるようであれば足首パーツの改修、もしくは作り直しを行う予定で保留中。
そうなった場合は最初のコンセプトは残したいのでデザインに頭をひねろうと考えます。
他者の(建設的な)指摘というものがいかに重要か、ということですね。…きっと一人では気づかないですから。
そんなわけで頭の中では検討を続けつつ、次のパーツの製作に移ります…。















