








自動運転車同士での、車同士や歩行者、バイクとの接触事故は減るのだろうか。
ハードウエアはセンサーを増やし、高性能のコンピュータで処理、賢いソフトウエアと組み合わせれば、事故はヒューマンエラーより少なく出来ると感じる。
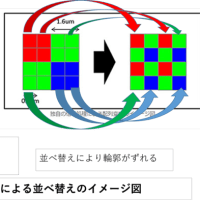
例えば、メルセデスベンツの様に、ステレオカメラに加え、前方と四隅の5個のレーダーと、前後と側面に超音波センサーを付けて、自動車線変更可能な自動運転や自動駐車を可能にする方法がある。しかし、ハードウエアが増えるほど故障率は高くなり、ソフトウエアの負荷が増えて応答遅れやフリーズ等の課題と向き合うことになる。一方、ライダー(LiDAR)はレーダーチャートのような全方位ではなく、光学カメラの様な視野のため、視野外から横断してくる自転車の検出が遅れ、事故に繋がった事例があるので四隅のレーダーは必須のように感じる。将来、この様に自動運転車が増えると自動運転車同士で電波干渉などによる障害が起きないのか等、気になる。レーダー探知機のように干渉防止手段が必要になりそうである。
現状ではプロドライバーのレベルは難しいとしても高齢者ドライバーよりは信頼性が高く出来そうだと感じる。高齢者の私としては実用的な自動運転車を手が届く価格で早く実現して欲しい。









※コメント投稿者のブログIDはブログ作成者のみに通知されます