








中性子星合体にしても軽い2個で 3.4+ 0.3− 0.1M⊙そんなか弱い重力波を検出出来るLIGO凄い。以下、機械翻訳。
GW190425:総質量~ 3.4 M太陽のコンパクトなバイナリ合体の観測〜3.4 M
(2020年1月6日に提出)
2019年4月25日に、LIGO Livingston検出器は、信号対雑音比12.9のコンパクトなバイナリ合体を観測しました。Virgo検出器はまた、低い信号対雑音比のために検出に寄与しなかったデータを取得していましたが、その後のパラメータ推定に使用されました。コンポーネント質量の90%の信頼できる間隔は、M⊙( 無次元のコンポーネントスピンの大きさを0.05未満に制限する場合はM⊙)の範囲です。これらの質量パラメータは、中性子星である個々のバイナリコンポーネントと一致しています。ただし、ソースフレームチャープ質量1.44+ 0.02− 0.02M⊙と総質量 3.4+ 0.3− 0.1M⊙このシステムのサイズは、他の既知の二元中性子星システムのサイズよりも大幅に大きくなっています。システムの一方または両方のバイナリコンポーネントがブラックホールである可能性は、重力波データから除外することはできません。既知の銀河連星中性子星集団との矛盾に基づいて、システムの可能な起源を議論します。信号がバイナリの中性子星の合体によって生成されたという仮定の下で、中性子星の合併のローカルレートは250-2810 Gpc ^ -3/年に更新されます1。
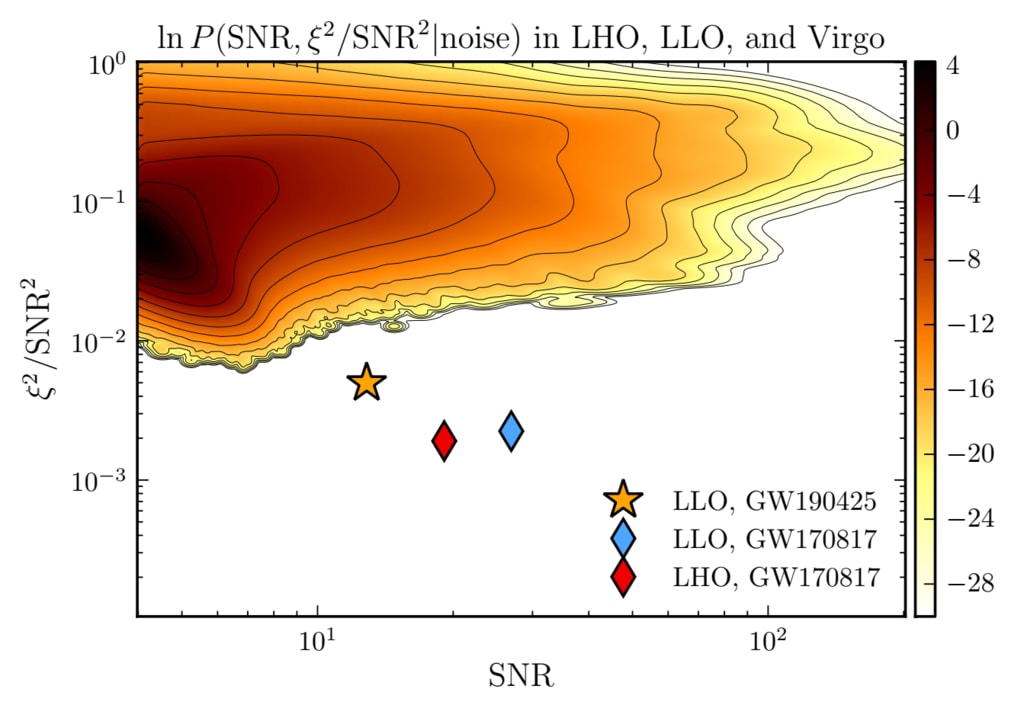
図1.結合されたSNR-ξ
BNS領域のLHO、LLO、およびVirgoの2つのノイズ確率密度関数、
SNR-ξのバックグラウンドトリガーの正規化された2Dヒストグラムを追加して計算
2
3つの検出器からの/ SNR2プレーン。 金色の星はGW190425を示します。 ありません
GW190425の位置に存在する背景。 立っています
Advancedに記録されたすべての背景
最初の3回の観測でのLIGOおよびVirgo検出器。
バックグラウンドには、O1および
O2およびO3の最初の50日間、いずれかの検出器が動作していたとき。 LLOとLHOの比較
GW170817のトリガーは、青と
それぞれ赤いダイヤモンド。

図2. GW190425のスカイマップ。 影付きのパッチは
ベイズのパラメーター推定コード、LALInferenceから取得したスカイマップ(Veitch et al。2015)(セクション4を参照)
細い点線の輪郭で囲まれた90%の信頼領域。 太い実線の輪郭は、低遅延の空の位置確認アルゴリズムからの90%の信頼領域を示しています。
BAYESTAR(Singer&Price2016)。
GW190425:総質量~ 3.4 M太陽のコンパクトなバイナリ合体の観測〜3.4 M
(2020年1月6日に提出)
2019年4月25日に、LIGO Livingston検出器は、信号対雑音比12.9のコンパクトなバイナリ合体を観測しました。Virgo検出器はまた、低い信号対雑音比のために検出に寄与しなかったデータを取得していましたが、その後のパラメータ推定に使用されました。コンポーネント質量の90%の信頼できる間隔は、M⊙( 無次元のコンポーネントスピンの大きさを0.05未満に制限する場合はM⊙)の範囲です。これらの質量パラメータは、中性子星である個々のバイナリコンポーネントと一致しています。ただし、ソースフレームチャープ質量1.44+ 0.02− 0.02M⊙と総質量 3.4+ 0.3− 0.1M⊙このシステムのサイズは、他の既知の二元中性子星システムのサイズよりも大幅に大きくなっています。システムの一方または両方のバイナリコンポーネントがブラックホールである可能性は、重力波データから除外することはできません。既知の銀河連星中性子星集団との矛盾に基づいて、システムの可能な起源を議論します。信号がバイナリの中性子星の合体によって生成されたという仮定の下で、中性子星の合併のローカルレートは250-2810 Gpc ^ -3/年に更新されます1。
図1.結合されたSNR-ξ
BNS領域のLHO、LLO、およびVirgoの2つのノイズ確率密度関数、
SNR-ξのバックグラウンドトリガーの正規化された2Dヒストグラムを追加して計算
2
3つの検出器からの/ SNR2プレーン。 金色の星はGW190425を示します。 ありません
GW190425の位置に存在する背景。 立っています
Advancedに記録されたすべての背景
最初の3回の観測でのLIGOおよびVirgo検出器。
バックグラウンドには、O1および
O2およびO3の最初の50日間、いずれかの検出器が動作していたとき。 LLOとLHOの比較
GW170817のトリガーは、青と
それぞれ赤いダイヤモンド。
図2. GW190425のスカイマップ。 影付きのパッチは
ベイズのパラメーター推定コード、LALInferenceから取得したスカイマップ(Veitch et al。2015)(セクション4を参照)
細い点線の輪郭で囲まれた90%の信頼領域。 太い実線の輪郭は、低遅延の空の位置確認アルゴリズムからの90%の信頼領域を示しています。
BAYESTAR(Singer&Price2016)。










※コメント投稿者のブログIDはブログ作成者のみに通知されます