









小さい小惑星は暗くて観測しにくい。でも地球近傍小惑星なら画面を横切る縞から光度変化と色のデータを取り出すことができる。以下、機械翻訳。
CFHTターゲット・オブ・オポチュニティ・ストリーク測光による10mスケールの地球近傍小惑星の自転周期と色
投稿日:2023年10月13日
概要
〜10 m スケールの小惑星の回転特性は、わずか数回の測定だけでは十分に理解されていません。 さらに、衝突
または、熱反動により回転が数秒未満の周期で回転する可能性があり、観察のリズムにより研究がわかりにくくなることがあります。
これは、電荷結合素子イメージャの長い読み出し時間によって引き起こされます。 の自転周期を測定する方法を紹介します。
カナダ・フランス・ハワイ望遠鏡のターゲット・オブ・オポチュニティー機能とその MegaCam イメージャーを使用した 10m スケールの小惑星
最も明るいときに単一露光で検出を意図的に縞模様にすることによって。 明るさの周期的な変化としては、
光条に沿った約 0.05 等の小さな星も、わずか数秒で測定できます。 また、ストリーク測光は
複数の g、r、i フィルター露光により、小惑星の色の測定が可能になります。 ストリーク測光法をテストした
3つの 10mスケールの小惑星、2016GE1、2016CG18、および 2016EV84の CFHT 観測。 私たちの 3つの目標は最も小規模なものの 1つです
既知の最も短い自転周期のいくつかを持つ、測定された自転周期/色を持つ既知の小惑星。 私たちのものを比較します
回転周期と分類学的結果を文献からの独立したデータとともに分析し、将来へのこの方法の応用について議論します。
小さな小惑星の観測。
キーワード:小惑星、小惑星:一般
1 はじめに
地球近傍小惑星 (NEA) は、放出されたメインベルト小惑星 (MBA) の動的に若い部分集団を表します。 彼らは短い
寿命は数百万年単位で、衝突で終わる。
内惑星、太陽、または太陽系からの放出。 その間
kmまたは100mスケールの回転特性の理解
小惑星は改善されている (例、Thirouin et al. 2016; Szabó et al. 2016)、〜10mスケールの小惑星の回転特性は、ほんの一握りの測定しか行われていないため、十分に理解されていません。
より大きな小惑星よりも桁違いに暗い。 さらに、ヤルコフスキー・オキーフ・ラジエフスキー・パダック(YORP)効果、以下によって引き起こされる
与えられた運動量による小惑星の回転の変化 太陽熱からの再放射熱放射により、10 回転する可能性があります。
m スケール NEA はその動的寿命内で次のようになります。
回転周期はわずか数秒以下です (Bottke et al. 2006;Vokrouhlický et al. 2015)。
小型小惑星の構造に関する研究はほとんど限られている コンピュータモデリングへ (例: Sánchez & Scheres 2014)。 一部のモデル
小さなオブジェクトは「強力」であるべきであり、おそらく一体型であるべきであることを示唆しています
オブジェクト (例、Bottke et al. 2005b,a) のいくつかについてはまだ観察されていません。
最小の小惑星は、それらが低密度であることを示唆しています(例:ミケリ他。 2014、2013)。 衝突前のNEO 2008TC3の発見
地球との研究は、地球の構造を研究する最初の機会を与えました。
観測データと隕石サンプルを含むメートルスケールの小惑星 (Jenniskens et al. 2010)。 データによると、2008TC3 は
直径数メートル未満の急速タンブラーで、次のもので構成されています。
材料の不均一な混合物は、それが瓦礫の山であることを暗示しています(Kozubal et al. 2011)。 他の研究では、小さな小惑星が
数十メートルのスケールは、許容される制限を超えて回転する傾向があります。
瓦礫の山の凝集力 (Harris et al. 2009; Warner et al.2009)。
10m以下の小惑星の構造的凝集に関する情報
直径が小さい小惑星は、より大きな小惑星に比べてあまり知られていません。 そこには
直径10m以下の小惑星は、既知のものだけで10個しかありません。
周期 (例: Thirouin et al. 2016) ですが、これより速く回転しているものはありません。
瓦礫の山または固い岩の理論上の破裂速度 (Sánchez およびシェーレス 2014; ボーリンら。 2014)。 高速で回転する小惑星が検出されないのは、観測バイアスの結果である可能性があります。
YORP効果 (Bottke et al. 2006; Vokrouhlický et al. 2015) 10m NEA の回転速度を理論上のバーストまで増加させる
10ラジアン/秒未満の制限を、以下よりも数桁短い時間で実現それらの数百万年の動的寿命 (Hirabashi 2015;ネスヴォルニーら。 2023年)。
さらに、10mスケールの小惑星は暗いため短い自転周期の測定
難しいです。 メインベルト小惑星(MBA) 大きさが 1m から 10m の間は、あまりにも暗いため観察できません
地球から。 このサイズ範囲の地球近傍小惑星 (NEA) は到達可能です。
月から数距離以内を通過する場合、V ∼ 20 以上の明るさ
地球 (Jedicke et al. 2016)。 しかし、NEA が間近に迫っているのは、毎秒約10秒角という高い速度のため、観察するのは困難です。
これが地球に近づいたときの動きであり、観測できるのはしばらくの間だけです。
ほとんどの施設で観測できないほど暗くなったり、太陽と合体したりするまで、一度に数日かかる(Bolin et al. 2020)。 さらに、
電荷結合素子 (CCD) イメージャの典型的な約 10秒の読み出し時間によって課せられる長い観察リズムにより、短い回転周期の検出は困難です (Jedicke et al. 2015)。
小惑星のライトカーブ観測の大部分は、個別の電荷結合素子 (CCD) カメラの露出を使用し、より遠くに焦点を当てます。
MBA などの低速回転小惑星 (McNeill et al. 2018;ハヌシュら。 2018)、Jupiter Trojans (Szabó et al. 2017; Ryan et al. 2017)
2017)、太陽系外天体(Thirouin & Sheppard 2019; Whid den et al. 2019; Thirouin & Sheppard 2022)、星間天体
(Bolin et al. 2018; Bolin & Lisse 2020)。 ライトカーブ観測
これらの遠方の物体は長時間露光と読み出しモードを使用します。
数十秒の観測周期は約 30 ~ 60 秒になります。
ごく最近になって、相補型金属酸化物半導体 (CMOS) カメラが登場しました (Harding et al. 2016)。
数 Hz 以上の連続イメージングにより、小惑星の高時間分解能観察が可能になりました (Purdum et al. 2021; Pomazan et al. 2021)。
2022年)。 ただし、CMOS カメラはせいぜい入手可能ではありません。 3m以上の光学望遠鏡施設は利用可能が限られている
ほとんどがメートルスケールの望遠鏡であり、その用途は観察に限定されています。
より明るいターゲット (V<17 Beniyama et al. 2022)。 代替方法
小惑星の高時間分解能測光を行うには、追跡された小惑星の検出に沿った光曲変化。 小惑星なら
毎秒 数 10 秒角の移動は、恒星追跡で観測されます。
星はカメラ内で静止したままであり、小惑星は縞を形成します
動きの方向に伸長した PSF (Vereš et al. 2012b)。
数 10 秒角/s の速度で移動する NEA は、次の方法を使用して画像化できます。
小惑星の運動速度での非恒星追跡の結果、背景の星を追跡しながら円形の PSF 小惑星を検出
(Sharma et al. 2023)。 小惑星が目に見えて追跡されている場合は、可能性があります
トレイル時間分解能に沿った明るさの変化を測定する
明るさの変化は航跡の長さと大気によって提供される画像解像度要素のサイズ
視覚またはピクセルスケール。 同様の方法論が取得に使用されています
〜1 msのライトカーブ測光、CCDカメラで観測された星の光度測定
連続読み取りモードで動作します (Bianco et al. 2009; Daniels et al.2023)、高速で移動する小惑星の偶然の観測でも
(Clark et al. 2023)。 高い時間分解能を提供するだけでなく、小惑星のライトカーブ測光、ストリーク ライトカーブが提供できる
いくつかの異なる画像を含む一連の画像で撮影した場合の色の推定
急速に回転するライトカーブを完全にカバーするフィルターです。
小惑星、回転変動が及ぼす影響を最小限に抑える
色の測定に関するもの (例: Bolin et al. 2020)。
この研究では、課題に対処する方法を紹介します。
高速で回転するものの色と回転周期を決定する
ストリーク小惑星測光から自転周期と色を測定することで小惑星を特定します。 私たちの技術は、非恒星追跡レートをゲリマンダー処理して、小惑星が CCD の列または行に沿って移動するようにします。
良好な信号対雑音比 (SNR) を提供するように計算されたレートで、
時間解像度。 追跡された背景の星は、時間分解測光キャリブレーション。 このテクニックをテストしたのは、
カナダ・フランス・ハワイ望遠鏡の MegaCam 装置による数 10 m スケールの NEA の観測 (Hartman et al. 2006;グウィンら。 2012) 測光を抽出し、決定した
回転周期とピリオドグラムによるターゲットの色分析。
図 1. 60 秒の g バンド露光で撮影された 2016 GE1 の観測
CFHT/MegaCam、2016 年 4 月 4 日。 小惑星の輪郭はオレンジ色です
矩形。 〜0.32 ''/s の非恒星追跡速度は、次のように調整されました。
小惑星は Y 方向にのみ尾を引きます。 これにより、参照が得られました
緑の長方形で囲まれた斜め方向に続く背景の星。
基本方位と画像スケールは画像上に示されています。

図 2. 2016 GE1、2016 CG18、および 2016 EV84 の g-r と r-i の色
SDSS からのメインベルトの小惑星の色に重ねて表示 (Ivezić et al. 2001;ジュリッチら。 2002年)。 円形の黄色のマーカーは太陽の色を示します (「表1。)

図 3. 小惑星内の小惑星の回転周波数と直径
品質コード U=2,3 の Lightcurve データベース (Warner et al. 2009) および
2016 GE1、2016 CG18、2016 EV84のローテーション期間はこちらから
仕事。 3 つのターゲットの直径 𝐷 は、絶対値から計算されました。
等級と仮定されたアルベド、𝑝 ≃ 0.25、典型的な小さな S 型小星 (Morbidelli et al. 2020; Bolin et al. 2023c)、𝐷 = 1329𝑝
−1/210−𝐻/5(ラッセル 1916)。 〜2.2時間の周期に相当するスピンバリア周波数
は水平の赤い一点鎖線で示されます (Polishook et al. 2016)。
4 結論
我々は、3 つの 〜10 m スケールの小惑星、2016 GE1、2016 CG18、および 2016 CG18 で小惑星ストリーク ライトカーブ技術の使用を実証しました。
2016 EV84 の結果を既存のデータと比較しました。 小惑星
ストリーク技術は将来 CCD を使用するときに適用できる可能性があります
高速回転する小惑星を研究するためのカメラ。 さらに、増加したのは、
ライトカーブの適用範囲により、物理的な測定が改善される可能性があります。
光学CCDでは観測可能時間が短く他の手段では観測が困難な小惑星の性質、
例えば 小惑星が接近している場合 (Jedicke et al. 2018a;
ファルノキアら。 2022)、または太陽に近い (例: 地球内部
オブジェクト (例: Bolin et al. 2022, 2023b)。
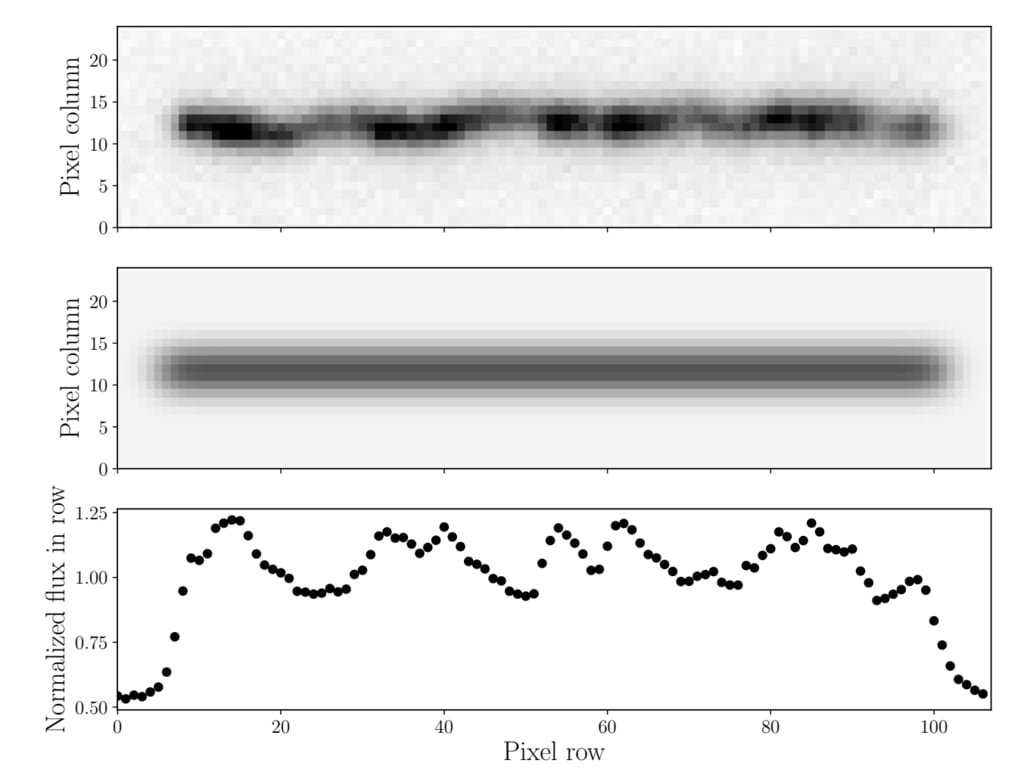
図S1。 上のパネル: 2016 年 4 月 4 日に回転した小惑星 2016 GE1 の軌跡
90°。 中央のパネル: Vereš et al. から得られたものと同じトレイル。 (2012a) トレイル
式に適合します。 S1. 垂直方向に揺れるトレイルの様子
望遠鏡の追跡が不完全であることが原因です。 下のパネル: の合計
各カラムのフラックスと中央値で正規化されたカラム番号
ライトカーブ。 フラックスは空の背景に対してまだ補正されておらず、
透明性。 ライトカーブの両端はサンプリングされるため、〜 0.5 に下がります。
背景の空。
CFHTターゲット・オブ・オポチュニティ・ストリーク測光による10mスケールの地球近傍小惑星の自転周期と色
投稿日:2023年10月13日
概要
〜10 m スケールの小惑星の回転特性は、わずか数回の測定だけでは十分に理解されていません。 さらに、衝突
または、熱反動により回転が数秒未満の周期で回転する可能性があり、観察のリズムにより研究がわかりにくくなることがあります。
これは、電荷結合素子イメージャの長い読み出し時間によって引き起こされます。 の自転周期を測定する方法を紹介します。
カナダ・フランス・ハワイ望遠鏡のターゲット・オブ・オポチュニティー機能とその MegaCam イメージャーを使用した 10m スケールの小惑星
最も明るいときに単一露光で検出を意図的に縞模様にすることによって。 明るさの周期的な変化としては、
光条に沿った約 0.05 等の小さな星も、わずか数秒で測定できます。 また、ストリーク測光は
複数の g、r、i フィルター露光により、小惑星の色の測定が可能になります。 ストリーク測光法をテストした
3つの 10mスケールの小惑星、2016GE1、2016CG18、および 2016EV84の CFHT 観測。 私たちの 3つの目標は最も小規模なものの 1つです
既知の最も短い自転周期のいくつかを持つ、測定された自転周期/色を持つ既知の小惑星。 私たちのものを比較します
回転周期と分類学的結果を文献からの独立したデータとともに分析し、将来へのこの方法の応用について議論します。
小さな小惑星の観測。
キーワード:小惑星、小惑星:一般
1 はじめに
地球近傍小惑星 (NEA) は、放出されたメインベルト小惑星 (MBA) の動的に若い部分集団を表します。 彼らは短い
寿命は数百万年単位で、衝突で終わる。
内惑星、太陽、または太陽系からの放出。 その間
kmまたは100mスケールの回転特性の理解
小惑星は改善されている (例、Thirouin et al. 2016; Szabó et al. 2016)、〜10mスケールの小惑星の回転特性は、ほんの一握りの測定しか行われていないため、十分に理解されていません。
より大きな小惑星よりも桁違いに暗い。 さらに、ヤルコフスキー・オキーフ・ラジエフスキー・パダック(YORP)効果、以下によって引き起こされる
与えられた運動量による小惑星の回転の変化 太陽熱からの再放射熱放射により、10 回転する可能性があります。
m スケール NEA はその動的寿命内で次のようになります。
回転周期はわずか数秒以下です (Bottke et al. 2006;Vokrouhlický et al. 2015)。
小型小惑星の構造に関する研究はほとんど限られている コンピュータモデリングへ (例: Sánchez & Scheres 2014)。 一部のモデル
小さなオブジェクトは「強力」であるべきであり、おそらく一体型であるべきであることを示唆しています
オブジェクト (例、Bottke et al. 2005b,a) のいくつかについてはまだ観察されていません。
最小の小惑星は、それらが低密度であることを示唆しています(例:ミケリ他。 2014、2013)。 衝突前のNEO 2008TC3の発見
地球との研究は、地球の構造を研究する最初の機会を与えました。
観測データと隕石サンプルを含むメートルスケールの小惑星 (Jenniskens et al. 2010)。 データによると、2008TC3 は
直径数メートル未満の急速タンブラーで、次のもので構成されています。
材料の不均一な混合物は、それが瓦礫の山であることを暗示しています(Kozubal et al. 2011)。 他の研究では、小さな小惑星が
数十メートルのスケールは、許容される制限を超えて回転する傾向があります。
瓦礫の山の凝集力 (Harris et al. 2009; Warner et al.2009)。
10m以下の小惑星の構造的凝集に関する情報
直径が小さい小惑星は、より大きな小惑星に比べてあまり知られていません。 そこには
直径10m以下の小惑星は、既知のものだけで10個しかありません。
周期 (例: Thirouin et al. 2016) ですが、これより速く回転しているものはありません。
瓦礫の山または固い岩の理論上の破裂速度 (Sánchez およびシェーレス 2014; ボーリンら。 2014)。 高速で回転する小惑星が検出されないのは、観測バイアスの結果である可能性があります。
YORP効果 (Bottke et al. 2006; Vokrouhlický et al. 2015) 10m NEA の回転速度を理論上のバーストまで増加させる
10ラジアン/秒未満の制限を、以下よりも数桁短い時間で実現それらの数百万年の動的寿命 (Hirabashi 2015;ネスヴォルニーら。 2023年)。
さらに、10mスケールの小惑星は暗いため短い自転周期の測定
難しいです。 メインベルト小惑星(MBA) 大きさが 1m から 10m の間は、あまりにも暗いため観察できません
地球から。 このサイズ範囲の地球近傍小惑星 (NEA) は到達可能です。
月から数距離以内を通過する場合、V ∼ 20 以上の明るさ
地球 (Jedicke et al. 2016)。 しかし、NEA が間近に迫っているのは、毎秒約10秒角という高い速度のため、観察するのは困難です。
これが地球に近づいたときの動きであり、観測できるのはしばらくの間だけです。
ほとんどの施設で観測できないほど暗くなったり、太陽と合体したりするまで、一度に数日かかる(Bolin et al. 2020)。 さらに、
電荷結合素子 (CCD) イメージャの典型的な約 10秒の読み出し時間によって課せられる長い観察リズムにより、短い回転周期の検出は困難です (Jedicke et al. 2015)。
小惑星のライトカーブ観測の大部分は、個別の電荷結合素子 (CCD) カメラの露出を使用し、より遠くに焦点を当てます。
MBA などの低速回転小惑星 (McNeill et al. 2018;ハヌシュら。 2018)、Jupiter Trojans (Szabó et al. 2017; Ryan et al. 2017)
2017)、太陽系外天体(Thirouin & Sheppard 2019; Whid den et al. 2019; Thirouin & Sheppard 2022)、星間天体
(Bolin et al. 2018; Bolin & Lisse 2020)。 ライトカーブ観測
これらの遠方の物体は長時間露光と読み出しモードを使用します。
数十秒の観測周期は約 30 ~ 60 秒になります。
ごく最近になって、相補型金属酸化物半導体 (CMOS) カメラが登場しました (Harding et al. 2016)。
数 Hz 以上の連続イメージングにより、小惑星の高時間分解能観察が可能になりました (Purdum et al. 2021; Pomazan et al. 2021)。
2022年)。 ただし、CMOS カメラはせいぜい入手可能ではありません。 3m以上の光学望遠鏡施設は利用可能が限られている
ほとんどがメートルスケールの望遠鏡であり、その用途は観察に限定されています。
より明るいターゲット (V<17 Beniyama et al. 2022)。 代替方法
小惑星の高時間分解能測光を行うには、追跡された小惑星の検出に沿った光曲変化。 小惑星なら
毎秒 数 10 秒角の移動は、恒星追跡で観測されます。
星はカメラ内で静止したままであり、小惑星は縞を形成します
動きの方向に伸長した PSF (Vereš et al. 2012b)。
数 10 秒角/s の速度で移動する NEA は、次の方法を使用して画像化できます。
小惑星の運動速度での非恒星追跡の結果、背景の星を追跡しながら円形の PSF 小惑星を検出
(Sharma et al. 2023)。 小惑星が目に見えて追跡されている場合は、可能性があります
トレイル時間分解能に沿った明るさの変化を測定する
明るさの変化は航跡の長さと大気によって提供される画像解像度要素のサイズ
視覚またはピクセルスケール。 同様の方法論が取得に使用されています
〜1 msのライトカーブ測光、CCDカメラで観測された星の光度測定
連続読み取りモードで動作します (Bianco et al. 2009; Daniels et al.2023)、高速で移動する小惑星の偶然の観測でも
(Clark et al. 2023)。 高い時間分解能を提供するだけでなく、小惑星のライトカーブ測光、ストリーク ライトカーブが提供できる
いくつかの異なる画像を含む一連の画像で撮影した場合の色の推定
急速に回転するライトカーブを完全にカバーするフィルターです。
小惑星、回転変動が及ぼす影響を最小限に抑える
色の測定に関するもの (例: Bolin et al. 2020)。
この研究では、課題に対処する方法を紹介します。
高速で回転するものの色と回転周期を決定する
ストリーク小惑星測光から自転周期と色を測定することで小惑星を特定します。 私たちの技術は、非恒星追跡レートをゲリマンダー処理して、小惑星が CCD の列または行に沿って移動するようにします。
良好な信号対雑音比 (SNR) を提供するように計算されたレートで、
時間解像度。 追跡された背景の星は、時間分解測光キャリブレーション。 このテクニックをテストしたのは、
カナダ・フランス・ハワイ望遠鏡の MegaCam 装置による数 10 m スケールの NEA の観測 (Hartman et al. 2006;グウィンら。 2012) 測光を抽出し、決定した
回転周期とピリオドグラムによるターゲットの色分析。
図 1. 60 秒の g バンド露光で撮影された 2016 GE1 の観測
CFHT/MegaCam、2016 年 4 月 4 日。 小惑星の輪郭はオレンジ色です
矩形。 〜0.32 ''/s の非恒星追跡速度は、次のように調整されました。
小惑星は Y 方向にのみ尾を引きます。 これにより、参照が得られました
緑の長方形で囲まれた斜め方向に続く背景の星。
基本方位と画像スケールは画像上に示されています。
図 2. 2016 GE1、2016 CG18、および 2016 EV84 の g-r と r-i の色
SDSS からのメインベルトの小惑星の色に重ねて表示 (Ivezić et al. 2001;ジュリッチら。 2002年)。 円形の黄色のマーカーは太陽の色を示します (「表1。)
図 3. 小惑星内の小惑星の回転周波数と直径
品質コード U=2,3 の Lightcurve データベース (Warner et al. 2009) および
2016 GE1、2016 CG18、2016 EV84のローテーション期間はこちらから
仕事。 3 つのターゲットの直径 𝐷 は、絶対値から計算されました。
等級と仮定されたアルベド、𝑝 ≃ 0.25、典型的な小さな S 型小星 (Morbidelli et al. 2020; Bolin et al. 2023c)、𝐷 = 1329𝑝
−1/210−𝐻/5(ラッセル 1916)。 〜2.2時間の周期に相当するスピンバリア周波数
は水平の赤い一点鎖線で示されます (Polishook et al. 2016)。
4 結論
我々は、3 つの 〜10 m スケールの小惑星、2016 GE1、2016 CG18、および 2016 CG18 で小惑星ストリーク ライトカーブ技術の使用を実証しました。
2016 EV84 の結果を既存のデータと比較しました。 小惑星
ストリーク技術は将来 CCD を使用するときに適用できる可能性があります
高速回転する小惑星を研究するためのカメラ。 さらに、増加したのは、
ライトカーブの適用範囲により、物理的な測定が改善される可能性があります。
光学CCDでは観測可能時間が短く他の手段では観測が困難な小惑星の性質、
例えば 小惑星が接近している場合 (Jedicke et al. 2018a;
ファルノキアら。 2022)、または太陽に近い (例: 地球内部
オブジェクト (例: Bolin et al. 2022, 2023b)。
図S1。 上のパネル: 2016 年 4 月 4 日に回転した小惑星 2016 GE1 の軌跡
90°。 中央のパネル: Vereš et al. から得られたものと同じトレイル。 (2012a) トレイル
式に適合します。 S1. 垂直方向に揺れるトレイルの様子
望遠鏡の追跡が不完全であることが原因です。 下のパネル: の合計
各カラムのフラックスと中央値で正規化されたカラム番号
ライトカーブ。 フラックスは空の背景に対してまだ補正されておらず、
透明性。 ライトカーブの両端はサンプリングされるため、〜 0.5 に下がります。
背景の空。










※コメント投稿者のブログIDはブログ作成者のみに通知されます