









補償光学の様なアクチュエーターをM3に内蔵してストレール比を0.9程度に高める事が出来る。すばる望遠鏡が0.5程度と言われているので星を点像に写す能力が半端ない。口径14mの主鏡をフェアリングの中に折り畳めるので安く宇宙望遠鏡を打ち上げられる。以下、機械翻訳。
SALTUS 観測所用の口径14メートルの展開可能な軸外遠赤外線宇宙望遠鏡の設計
概要。宇宙研究用単一口径大型望遠鏡 (SALTUS) は、宇宙の起源を探る極めて大型の遠赤外線 (遠赤外線) 宇宙観測所を天体物理学コミュニティに提供するために設計された展開可能な宇宙望遠鏡です。SALTUS 観測所は、最初の銀河、さまざまな進化段階にある原始惑星系円盤、さまざまな太陽系天体など、何千もの微弱な天体物理学的ターゲットを観測できます。SALTUS の設計アーキテクチャは、放射冷却された口径14mの遮蔽されていない口径と極低温機器を使用して、既存の地上または宇宙観測所ではほとんど利用できない波長範囲で、前例のない感度で高いスペクトルおよび空間分解能を実現します。独自の SALTUS 光学設計は、大型の膨張式軸外し主鏡を採用し、広い ±0.02°× 0.02°視野にわたって遠赤外線波長で優れた感度、角度分解能、および画像性能を提供します。SALTUS の設計は、非常にコンパクトなフォーム ファクタであるため、利用可能な打ち上げフェアリングに簡単に収納でき、その後軌道上に展開できます。
キーワード: SALTUS、遠赤外線天文学、遠赤外線、膨張式反射鏡、展開型宇宙望遠鏡、光学設計。
1 はじめに
宇宙研究用単一開口大型望遠鏡 (SALTUS) は、宇宙の起源を観測および調査するために最適化された展開型遠赤外線 (遠赤外線) 宇宙観測ミッション コンセプトです。図 1 に示す宇宙望遠鏡は、L2 の周りのハロー軌道から動作します。この望遠鏡は、前例のない直径14mの遮るもののない開口 [1] の優れた光子収集能力を利用して、最初の銀河、さまざまな進化段階にある原始惑星系円盤、およびさまざまな太陽系天体を観測することにより、画期的な研究を実施します。
この望遠鏡の独自の光学設計には、放射冷却された膨張式 14m主鏡と極低温機器が組み込まれています。この設計により、既存の地上または宇宙観測所ではほとんど調査されていない広い波長範囲にわたって、高いスペクトルおよび空間分解能と高い感度の両方が実現します。これらの遠赤外線観測機能は、34 ~ 659µm の波長をカバーする極低温コヒーレント検出器 (ホット エレクトロン ボロメータ ミキサー - HEB) とインコヒーレント検出器 (運動インダクタンス検出器 - KID) を使用して、局所宇宙と遠方宇宙の間の知識のギャップを埋めます [2]。
図 1 に示すサンシールドにより、14mの軸外し主鏡を 45K未満まで放射冷却できます。この機能は、望遠鏡が遠赤外線をバックグラウンド ノイズを最小限に抑えて捉える能力に不可欠であり、広帯域の観測範囲をさらに拡大します。
SALTUS 観測所用の口径14メートルの展開可能な軸外遠赤外線宇宙望遠鏡の設計
概要。宇宙研究用単一口径大型望遠鏡 (SALTUS) は、宇宙の起源を探る極めて大型の遠赤外線 (遠赤外線) 宇宙観測所を天体物理学コミュニティに提供するために設計された展開可能な宇宙望遠鏡です。SALTUS 観測所は、最初の銀河、さまざまな進化段階にある原始惑星系円盤、さまざまな太陽系天体など、何千もの微弱な天体物理学的ターゲットを観測できます。SALTUS の設計アーキテクチャは、放射冷却された口径14mの遮蔽されていない口径と極低温機器を使用して、既存の地上または宇宙観測所ではほとんど利用できない波長範囲で、前例のない感度で高いスペクトルおよび空間分解能を実現します。独自の SALTUS 光学設計は、大型の膨張式軸外し主鏡を採用し、広い ±0.02°× 0.02°視野にわたって遠赤外線波長で優れた感度、角度分解能、および画像性能を提供します。SALTUS の設計は、非常にコンパクトなフォーム ファクタであるため、利用可能な打ち上げフェアリングに簡単に収納でき、その後軌道上に展開できます。
キーワード: SALTUS、遠赤外線天文学、遠赤外線、膨張式反射鏡、展開型宇宙望遠鏡、光学設計。
1 はじめに
宇宙研究用単一開口大型望遠鏡 (SALTUS) は、宇宙の起源を観測および調査するために最適化された展開型遠赤外線 (遠赤外線) 宇宙観測ミッション コンセプトです。図 1 に示す宇宙望遠鏡は、L2 の周りのハロー軌道から動作します。この望遠鏡は、前例のない直径14mの遮るもののない開口 [1] の優れた光子収集能力を利用して、最初の銀河、さまざまな進化段階にある原始惑星系円盤、およびさまざまな太陽系天体を観測することにより、画期的な研究を実施します。
この望遠鏡の独自の光学設計には、放射冷却された膨張式 14m主鏡と極低温機器が組み込まれています。この設計により、既存の地上または宇宙観測所ではほとんど調査されていない広い波長範囲にわたって、高いスペクトルおよび空間分解能と高い感度の両方が実現します。これらの遠赤外線観測機能は、34 ~ 659µm の波長をカバーする極低温コヒーレント検出器 (ホット エレクトロン ボロメータ ミキサー - HEB) とインコヒーレント検出器 (運動インダクタンス検出器 - KID) を使用して、局所宇宙と遠方宇宙の間の知識のギャップを埋めます [2]。
図 1 に示すサンシールドにより、14mの軸外し主鏡を 45K未満まで放射冷却できます。この機能は、望遠鏡が遠赤外線をバックグラウンド ノイズを最小限に抑えて捉える能力に不可欠であり、広帯域の観測範囲をさらに拡大します。
図 1 は、SALTUS 観測所の 3D レンダリング画像です。直径14mの膨張式軸外し主鏡技術と、45K 未満まで放射冷却するサンシールドを備えています。
SALTUS は、主鏡 (M1) として膨張式膜 [3 – 5] を備えており、展開可能な単一のブームを介して宇宙船に接続されています。膨張式膜は、宇宙仕様のポリイミド フィルムで作られており、有限要素解析と熱真空 (TVAC) テストによって検証されたように、低圧下での臨界ひずみに非常に安定して予測可能な方法で耐えられるように設計されています。
収縮した M1 の形状構成は、L’Garde [5] によって開発された方法である逆問題ソルバーを使用して決定されます。特定の設計膨張圧力と膜の材料および幾何学的特性が与えられた場合、膨張した M1 が光学設計の目標表面形状を満たすように、収縮した初期のプロファイルが計算されます。モデリング プロセスには、境界条件を伴う 1 次非線形微分方程式の数値積分が含まれます。順方向変換のための収縮した初期の形状のシミュレーションは、幾何学的非線形膜有限要素シミュレーション プラットフォームであるインフレータブル膜の有限要素解析 (FAIM) を使用して実行されます [5]。図 2 に示す 1m および 3m スケールのインフレータブル ミラーは、構築時のシステムのパフォーマンスとモデリングの忠実度をテストするために設計、モデル化、構築されています。直径 1 m のプロトタイプは、図 2 (左) に示すように、ノースロップ グラマンの TVAC チャンバーでテストされました。ミラーマウントは、TVACテスト中のその場光学テストのために、偏向計測システムに対する位置合わせと位置を調整するように設計されました[6]。1mのプロトタイプは、TVACチャンバー内の円筒軸と機械軸が平行になるように配置されました。カスタムビルドのインフレーションコントロールユニットは、TVACテスト全体を通して10Paの分解能で内部圧力を維持しました。内部圧力は、チャンバー圧力に対して520Paに設定されました。チャンバー圧力は、大気圧(101,325Pa)からほぼ真空(0.110Pa)までの範囲でした[6]。偏向計測TVACテストの結果、安定したM1表面形状と較正機能が正常に確認されました。これらの計測機能は、低次表面形状から中空間周波数表面誤差までをカバーしています。さらに、図2(右)に示す3mスケールモデルは、インフレータブルミラー技術のスケーラビリティを実証しました[2]。この論文では、14 m 規模のメンブレンミラー表面を実現するための実用的なエンジニアリングの観点と決定論的モデリング手法が強調されました。
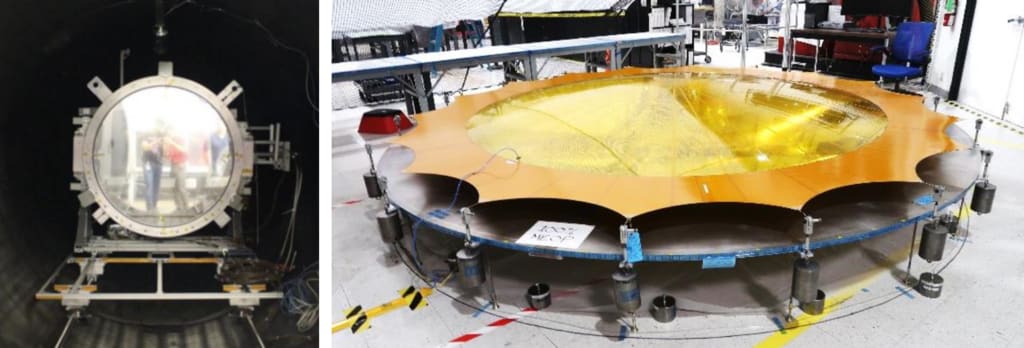
図 2 ノースロップ グラマンの TVAC テストチャンバーにある 1m 規模の SALTUS M1 プロトタイプ (左) [4] と、L’Gardeで実証された 3m規模のインフレータブルミラー (右)。
2 展開可能な光学設計
2.1 インフレータブル主鏡を使用した展開可能な光学設計
14 m のクリアアパーチャを持つ軸外し主鏡を備えた展開可能な SALTUS 光学設計を図 3 に示します。インフレータブル M1 は、単一のブーム構造を介してコールドコレクターモジュール (CCM) に接続され、入力ビームを CCM に集束します。このモジュールは、±0.02° × 0.02° の視野 (FoV) 内で残留収差を補正するようにコンパクトに設計されています。 CCM のコンパクトさは、展開可能なブームと膨張可能な M1 と相まって、SALTUS の収納フォーム ファクタを小さくします。設計者が主鏡を非球面または自由曲面タイプ (多項式などを使用) として指定できる従来の光学設計手法とは異なり、SALTUS M1 の表面には、実現可能で正確にモデル化された膨張可能な表面形状が必要です。SALTUS チームは、これらの形状をモデル化して最適化するための逆問題に取り組みました。これには、光線追跡の結果から得られる目的の最終表面形状、膨張圧力と制御、膜の材料と形状特性を使用して、膨張していない初期の形状を計算することが含まれます。次に、解析ソリューションと実験結果に対して検証された有限要素ソフトウェア FAIM を使用し、[5、6] SALTUS M1 の形状精度解析を実行しました。最終的な M1 の形状は、ほぼ軸外放物面のようで、最適球面からの PV (Peak-to-Valley) 非球面偏差は図 4 に示されています。各 SALTUS ミラーの最適化された光学処方を表 1 にまとめました。

図 3 SALTUS の光学設計は、遮るもののない軸外しの 14 メートルの開口を持つインフレータブル M1 と、非常にコンパクトなコールド コレクター モジュールを特徴としています。この設計により、打ち上げ時に SALTUS を小型の収納フォーム ファクターで収納できます。
M1 の最終的なモデル形状は ZEMAX モデルに統合され、SALTUS の光学設計を最適化して完成させます。この統合により、下流の CCM が M1 の実際の膨張形状を補正できるようになります。その結果、SALTUS の光学設計には、インフレータブル メンブレン ミラーの数値モデル化に関する包括的な知識と結果が完全に組み込まれています。モデリングの不確実性や軌道上の環境要因による残りの誤差は、低次の変形可能ミラー M3 によって修正されます。回折限界の 14 m SALTUS 望遠鏡の公称光学設計パラメータの概要を表 2 に示します。

図 4 最適球面からの SALTUS M1 表面の非球面逸脱マップは、膨張式表面有限要素ソフトウェア FAIM を使用して最適化されています。37.978 mm のピークツーバレー (PV) と 6.695 mm の二乗平均平方根 (RMS) の統計は、バランスのとれた非点収差を持つオフ アクシス主鏡としての目標設計を示しています。
表 1 SALTUS 光学表面の処方

表 2 全体的な SALTUS 光学設計パラメータ

2.2 コールド コレクター モジュール設計
図 5 に示すコールド コレクター モジュール (CCM) は、視野 (FoV) 全体にわたって M1 収差のバランスをとるためにコンパクトにパッケージ化されています。ロケットのペイロードフェアリング容積内に収めるという困難な要件によって必要となったその設計は、高度に軸外しされた折り畳み構成を採用しています。これは、ジェイムズ・ウェッブ宇宙望遠鏡 (JWST) [7] やアリゾナ大学の 6.5 m モノリシック宇宙望遠鏡 [8] で使用されているような、広い視野角の用途でよく使用される従来の 3 ミラーアナスティグマット (TMA) 設計とは大きく異なります。M2 は、M3 の位置の近くに M1 の像共役面 (つまり瞳面) を作成します。M3 は、戦略的に正確な瞳面からわずかにずれた位置に配置されます。この配置は、凸面 M3 のサイズを最小限に抑え、CCM エンベロープ内に収まるようにすることを目的としています。凸面ミラーの製造とテストは困難な場合がありますが、このアプローチはコストあたりの技術的価値が最も高くなります。さらに、M3 を正確に瞳面に配置しても、M1 の膨張時の表面形状誤差とフィールド共通収差全体を完全に修正することはできません。これは、M2 と M3 の大きな軸外およびコンパクトな光学設計によって生じる瞳収差によるものです。残留誤差は、下流の非球面の小型 M5 ミラーによって補正されます。

図 5 (左) コンパクトな設計の SALTUS のコールド コレクター モジュールは、視野 (FoV) 全体にわたって M1 収差を補正し、FoV をスキャンします。 (右) SPGD ベースの波面センシング パスの静的ビーム スプリッターが描かれており、軸上で調整された科学ビーム パスが青、公称モニタリング 5 µm 波長ビーム パスが緑、および位置ずれしたモニタリング ビーム パスの例が赤で示されています。
SALTUS 設計は、折り畳みジオメトリの小型ミラーを使用することで、コンパクトなエンベロープ内で回折限界の公称性能を実現します。これらのミラーは、標準のメートル クラスのシングル ポイント ダイヤモンド旋削 (SPDT) マシンで迅速に製造できることは注目に値します。
これらのマシンは、遠赤外線波長アプリケーションに適した成熟した低速または高速ツールサーボ技術を使用して自由曲面を生成できる、非常に決定論的なマシンです。したがって、M2 と M3 の最終形状は、製造時および膨張時の M1 形状の計測データを補正するために SPDT マシンを使用して微調整されます。この公称オフセットにより、図 6 に示す M3 変形ミラー (DM) に必要なダイナミック レンジが大幅に減少します。M3 は、成熟した設計の伝統 [9] を備えた機械的に単純な準静的 DM であり、複雑な電子制御ループや高速制御ループを回避します。ステッピング モーターと差動ボール スクリュー アクチュエータを組み合わせた 350 mm 開口部の DM が実証され、0.025 µm の表面位置決め分解能と合計 40 µm の偏向範囲を備えた優れたクロスカップリングのないアクチュエータ応答機能を提供しました [9]。機械設計のシンプルさ、実際のシステムで実証された性能、適切なミラー サイズ (直径 350 mm、SALTUS M3 の 220 mm より大きい) と十分な制御解像度 (SALTUS の最短科学波長 30 µm よりはるかに小さい 0.025 µm) により、軌道上で適応光学システムを展開する際のリスクが大幅に低減されます。一般的な可変ミラーは低から中程度の空間周波数の誤差を補正しますが、SALTUS M3 は 19 個のリニア アクチュエータ (ステッピング モーター) を使用して、主にコマや非点収差などの低空間周波数の誤差に対処します。

図 6 直径 220 mm、アクチュエータ 19 個、低次 SALTUS 準静的変形ミラー (M3) の概略図。ヘンダーソンとガンによる従来の設計とハードウェア デモンストレーション (エネルギー省の資金提供 # ED-78-C-08-1551) [9] と直接比較しています。
低次 DM は SALTUS 設計アーキテクチャの復元力を強化します。地上と軌道上の M1 形状の違いなどのモデリングの不確実性を表面変形によって補正します。M3 は、位置ずれやその他の光学表面変形によって生じるその他の残留収差にも対処できます。地上観測所アプリケーションでの科学観測中に非常に高速 (例: 1~2 kHz) で動作する一般的な適応光学 DM とは異なり、この DM は主に試運転段階で使用されます。その主な機能は、SALTUS 観測所の光学性能に対する環境の影響を調整することです。オプションとして、M3 は科学観測中に使用して、熱構造のずれなどによって生じるような、ゆっくりと変化する収差を補正することもできます。標準のモデルフリーの確率的並列勾配降下法 (SPGD) アルゴリズム [10 – 13] は、図 5 (右) に示す監視検出器平面上のすべての観測フィールドにわたって、二乗平均平方根 (RMS) スポット サイズを評価します。この評価は、望遠鏡のアライメントと M3 DM の低次形状制御を調整するために使用されます。アルゴリズムは、望遠鏡の自由度 (DoF) パラメータをランダムに調整し、スポット サイズがそれに続くと、次の DoF 調整セットが決定されます。DoF の初期の広範な摂動は、アライメントとコリメーションの初期段階でアライメント状態を迅速に確認するのに役立ちます。次に、波面収差モデルに基づく SPGD アプローチにより、アライメントと M3 の形状が正確に調整され、必要に応じて科学画像取得中にその場で調整できるようになります。
通常、SPGD アルゴリズムは、波面制御ループを 1λSPGD PV (ピークから谷まで) 未満に減らすことができます [12、13]。図 5 (右) に示すように、SPGD アルゴリズムは、ポイント スプレッド関数に基づいて波面エラーを検知するために、約 5µm 波長の光を使用します。これは、最短の30 µm 科学波長に対して 1/6 λScience PV までの波面エラーを検知し、低次の M3 DM を適切に駆動することに相当します。
SALTUS のコヒーレントおよびインコヒーレント科学機器は、フィードホーンおよびレンズ結合検出器を使用します。瞳孔共役面にある M6 フィールド スキャナーは、視野 (FoV) をゆっくりとスキャンして、静止した最終科学ビームを科学機器の最終焦点面に向けます [2]。必要な M6 の可動範囲は、x 傾斜で ±2.5°、y 傾斜で ±2.9°です。ピボット ポイントが M6 ミラー表面の中心にある場合、並進運動は必要ありません。M7 高速ステアリング ミラーは、高時間周波数の振動を補正して、最終的な点広がり関数 (PSF) を安定させます。
2.3 回折限界の公称光学性能
図 7 のスポット図は、静止した最終焦点面 (つまり、下流の科学機器とインターフェイスする焦点面) を示しており、瞳面にある M6 フィールド スキャナーを使用して達成された、視野 (FoV) 全体にわたって非常に安定したビーム フットプリント (具体的には ±0.02°× 0.02°) を示しています。
さらに、このフィールド スキャナーは、試運転段階で軌道上の SALTUS 観測所を補正および較正する上で役立ちます。 M6 フィールド スキャナーは、エアリー ディスク内のすべてのフィールド ポイント ビームを最短設計波長30µm (黒丸で表示) で集束して供給できるため、科学観測中にビームを単一のフィードホーン検出器に向けて順次誘導することができます。図 8 は、最良および最悪のフィールド ポイントの PSF を示しており、膨張可能なプライマリ M1 形状モデルと CCM を含む SALTUS 設計の回折限界公称性能を示しています。約 0.82 ~ 0.94 の範囲のストレール比は、システムの高品質の画像性能を示しています。特に、この回折限界公称画像性能は、SALTUS 分光科学機器 (GUSTO 機器 [14] など) の要件を超えており、許容誤差分析にかなりの余裕があります。これは、堅牢な宇宙観測所アーキテクチャに直接貢献します [2]。
5 結論
展開可能な SALTUS 光学設計は、従来の宇宙望遠鏡ミッションのコストと質量予算のほんの一部で、これまでにないほど大きな光子収集領域を提供します。±0.02°× 0.02°の視野全体にわたって、公称回折限界性能 (つまり、ストレール比が 0.8 以上) を維持します。変形可能な M3 ミラーを使用する適応型光学システムは、展開時に軌道上の収差を補正し、遠赤外線 (far-IR) 科学観測の品質を保証します。許容範囲と迷光の両方の分析により、SALTUS 設計の堅牢で弾力性のある光学性能が科学機器の要件を満たしていることが確認されました。SALTUS 観測所は、宇宙物理学コミュニティに、宇宙の起源に関する画期的な探査を可能にする、大規模で遮るもののない遠赤外線宇宙観測所を提供する準備ができています。
SALTUS は、主鏡 (M1) として膨張式膜 [3 – 5] を備えており、展開可能な単一のブームを介して宇宙船に接続されています。膨張式膜は、宇宙仕様のポリイミド フィルムで作られており、有限要素解析と熱真空 (TVAC) テストによって検証されたように、低圧下での臨界ひずみに非常に安定して予測可能な方法で耐えられるように設計されています。
収縮した M1 の形状構成は、L’Garde [5] によって開発された方法である逆問題ソルバーを使用して決定されます。特定の設計膨張圧力と膜の材料および幾何学的特性が与えられた場合、膨張した M1 が光学設計の目標表面形状を満たすように、収縮した初期のプロファイルが計算されます。モデリング プロセスには、境界条件を伴う 1 次非線形微分方程式の数値積分が含まれます。順方向変換のための収縮した初期の形状のシミュレーションは、幾何学的非線形膜有限要素シミュレーション プラットフォームであるインフレータブル膜の有限要素解析 (FAIM) を使用して実行されます [5]。図 2 に示す 1m および 3m スケールのインフレータブル ミラーは、構築時のシステムのパフォーマンスとモデリングの忠実度をテストするために設計、モデル化、構築されています。直径 1 m のプロトタイプは、図 2 (左) に示すように、ノースロップ グラマンの TVAC チャンバーでテストされました。ミラーマウントは、TVACテスト中のその場光学テストのために、偏向計測システムに対する位置合わせと位置を調整するように設計されました[6]。1mのプロトタイプは、TVACチャンバー内の円筒軸と機械軸が平行になるように配置されました。カスタムビルドのインフレーションコントロールユニットは、TVACテスト全体を通して10Paの分解能で内部圧力を維持しました。内部圧力は、チャンバー圧力に対して520Paに設定されました。チャンバー圧力は、大気圧(101,325Pa)からほぼ真空(0.110Pa)までの範囲でした[6]。偏向計測TVACテストの結果、安定したM1表面形状と較正機能が正常に確認されました。これらの計測機能は、低次表面形状から中空間周波数表面誤差までをカバーしています。さらに、図2(右)に示す3mスケールモデルは、インフレータブルミラー技術のスケーラビリティを実証しました[2]。この論文では、14 m 規模のメンブレンミラー表面を実現するための実用的なエンジニアリングの観点と決定論的モデリング手法が強調されました。
図 2 ノースロップ グラマンの TVAC テストチャンバーにある 1m 規模の SALTUS M1 プロトタイプ (左) [4] と、L’Gardeで実証された 3m規模のインフレータブルミラー (右)。
2 展開可能な光学設計
2.1 インフレータブル主鏡を使用した展開可能な光学設計
14 m のクリアアパーチャを持つ軸外し主鏡を備えた展開可能な SALTUS 光学設計を図 3 に示します。インフレータブル M1 は、単一のブーム構造を介してコールドコレクターモジュール (CCM) に接続され、入力ビームを CCM に集束します。このモジュールは、±0.02° × 0.02° の視野 (FoV) 内で残留収差を補正するようにコンパクトに設計されています。 CCM のコンパクトさは、展開可能なブームと膨張可能な M1 と相まって、SALTUS の収納フォーム ファクタを小さくします。設計者が主鏡を非球面または自由曲面タイプ (多項式などを使用) として指定できる従来の光学設計手法とは異なり、SALTUS M1 の表面には、実現可能で正確にモデル化された膨張可能な表面形状が必要です。SALTUS チームは、これらの形状をモデル化して最適化するための逆問題に取り組みました。これには、光線追跡の結果から得られる目的の最終表面形状、膨張圧力と制御、膜の材料と形状特性を使用して、膨張していない初期の形状を計算することが含まれます。次に、解析ソリューションと実験結果に対して検証された有限要素ソフトウェア FAIM を使用し、[5、6] SALTUS M1 の形状精度解析を実行しました。最終的な M1 の形状は、ほぼ軸外放物面のようで、最適球面からの PV (Peak-to-Valley) 非球面偏差は図 4 に示されています。各 SALTUS ミラーの最適化された光学処方を表 1 にまとめました。
図 3 SALTUS の光学設計は、遮るもののない軸外しの 14 メートルの開口を持つインフレータブル M1 と、非常にコンパクトなコールド コレクター モジュールを特徴としています。この設計により、打ち上げ時に SALTUS を小型の収納フォーム ファクターで収納できます。
M1 の最終的なモデル形状は ZEMAX モデルに統合され、SALTUS の光学設計を最適化して完成させます。この統合により、下流の CCM が M1 の実際の膨張形状を補正できるようになります。その結果、SALTUS の光学設計には、インフレータブル メンブレン ミラーの数値モデル化に関する包括的な知識と結果が完全に組み込まれています。モデリングの不確実性や軌道上の環境要因による残りの誤差は、低次の変形可能ミラー M3 によって修正されます。回折限界の 14 m SALTUS 望遠鏡の公称光学設計パラメータの概要を表 2 に示します。
図 4 最適球面からの SALTUS M1 表面の非球面逸脱マップは、膨張式表面有限要素ソフトウェア FAIM を使用して最適化されています。37.978 mm のピークツーバレー (PV) と 6.695 mm の二乗平均平方根 (RMS) の統計は、バランスのとれた非点収差を持つオフ アクシス主鏡としての目標設計を示しています。
表 1 SALTUS 光学表面の処方
表 2 全体的な SALTUS 光学設計パラメータ
2.2 コールド コレクター モジュール設計
図 5 に示すコールド コレクター モジュール (CCM) は、視野 (FoV) 全体にわたって M1 収差のバランスをとるためにコンパクトにパッケージ化されています。ロケットのペイロードフェアリング容積内に収めるという困難な要件によって必要となったその設計は、高度に軸外しされた折り畳み構成を採用しています。これは、ジェイムズ・ウェッブ宇宙望遠鏡 (JWST) [7] やアリゾナ大学の 6.5 m モノリシック宇宙望遠鏡 [8] で使用されているような、広い視野角の用途でよく使用される従来の 3 ミラーアナスティグマット (TMA) 設計とは大きく異なります。M2 は、M3 の位置の近くに M1 の像共役面 (つまり瞳面) を作成します。M3 は、戦略的に正確な瞳面からわずかにずれた位置に配置されます。この配置は、凸面 M3 のサイズを最小限に抑え、CCM エンベロープ内に収まるようにすることを目的としています。凸面ミラーの製造とテストは困難な場合がありますが、このアプローチはコストあたりの技術的価値が最も高くなります。さらに、M3 を正確に瞳面に配置しても、M1 の膨張時の表面形状誤差とフィールド共通収差全体を完全に修正することはできません。これは、M2 と M3 の大きな軸外およびコンパクトな光学設計によって生じる瞳収差によるものです。残留誤差は、下流の非球面の小型 M5 ミラーによって補正されます。
図 5 (左) コンパクトな設計の SALTUS のコールド コレクター モジュールは、視野 (FoV) 全体にわたって M1 収差を補正し、FoV をスキャンします。 (右) SPGD ベースの波面センシング パスの静的ビーム スプリッターが描かれており、軸上で調整された科学ビーム パスが青、公称モニタリング 5 µm 波長ビーム パスが緑、および位置ずれしたモニタリング ビーム パスの例が赤で示されています。
SALTUS 設計は、折り畳みジオメトリの小型ミラーを使用することで、コンパクトなエンベロープ内で回折限界の公称性能を実現します。これらのミラーは、標準のメートル クラスのシングル ポイント ダイヤモンド旋削 (SPDT) マシンで迅速に製造できることは注目に値します。
これらのマシンは、遠赤外線波長アプリケーションに適した成熟した低速または高速ツールサーボ技術を使用して自由曲面を生成できる、非常に決定論的なマシンです。したがって、M2 と M3 の最終形状は、製造時および膨張時の M1 形状の計測データを補正するために SPDT マシンを使用して微調整されます。この公称オフセットにより、図 6 に示す M3 変形ミラー (DM) に必要なダイナミック レンジが大幅に減少します。M3 は、成熟した設計の伝統 [9] を備えた機械的に単純な準静的 DM であり、複雑な電子制御ループや高速制御ループを回避します。ステッピング モーターと差動ボール スクリュー アクチュエータを組み合わせた 350 mm 開口部の DM が実証され、0.025 µm の表面位置決め分解能と合計 40 µm の偏向範囲を備えた優れたクロスカップリングのないアクチュエータ応答機能を提供しました [9]。機械設計のシンプルさ、実際のシステムで実証された性能、適切なミラー サイズ (直径 350 mm、SALTUS M3 の 220 mm より大きい) と十分な制御解像度 (SALTUS の最短科学波長 30 µm よりはるかに小さい 0.025 µm) により、軌道上で適応光学システムを展開する際のリスクが大幅に低減されます。一般的な可変ミラーは低から中程度の空間周波数の誤差を補正しますが、SALTUS M3 は 19 個のリニア アクチュエータ (ステッピング モーター) を使用して、主にコマや非点収差などの低空間周波数の誤差に対処します。
図 6 直径 220 mm、アクチュエータ 19 個、低次 SALTUS 準静的変形ミラー (M3) の概略図。ヘンダーソンとガンによる従来の設計とハードウェア デモンストレーション (エネルギー省の資金提供 # ED-78-C-08-1551) [9] と直接比較しています。
低次 DM は SALTUS 設計アーキテクチャの復元力を強化します。地上と軌道上の M1 形状の違いなどのモデリングの不確実性を表面変形によって補正します。M3 は、位置ずれやその他の光学表面変形によって生じるその他の残留収差にも対処できます。地上観測所アプリケーションでの科学観測中に非常に高速 (例: 1~2 kHz) で動作する一般的な適応光学 DM とは異なり、この DM は主に試運転段階で使用されます。その主な機能は、SALTUS 観測所の光学性能に対する環境の影響を調整することです。オプションとして、M3 は科学観測中に使用して、熱構造のずれなどによって生じるような、ゆっくりと変化する収差を補正することもできます。標準のモデルフリーの確率的並列勾配降下法 (SPGD) アルゴリズム [10 – 13] は、図 5 (右) に示す監視検出器平面上のすべての観測フィールドにわたって、二乗平均平方根 (RMS) スポット サイズを評価します。この評価は、望遠鏡のアライメントと M3 DM の低次形状制御を調整するために使用されます。アルゴリズムは、望遠鏡の自由度 (DoF) パラメータをランダムに調整し、スポット サイズがそれに続くと、次の DoF 調整セットが決定されます。DoF の初期の広範な摂動は、アライメントとコリメーションの初期段階でアライメント状態を迅速に確認するのに役立ちます。次に、波面収差モデルに基づく SPGD アプローチにより、アライメントと M3 の形状が正確に調整され、必要に応じて科学画像取得中にその場で調整できるようになります。
通常、SPGD アルゴリズムは、波面制御ループを 1λSPGD PV (ピークから谷まで) 未満に減らすことができます [12、13]。図 5 (右) に示すように、SPGD アルゴリズムは、ポイント スプレッド関数に基づいて波面エラーを検知するために、約 5µm 波長の光を使用します。これは、最短の30 µm 科学波長に対して 1/6 λScience PV までの波面エラーを検知し、低次の M3 DM を適切に駆動することに相当します。
SALTUS のコヒーレントおよびインコヒーレント科学機器は、フィードホーンおよびレンズ結合検出器を使用します。瞳孔共役面にある M6 フィールド スキャナーは、視野 (FoV) をゆっくりとスキャンして、静止した最終科学ビームを科学機器の最終焦点面に向けます [2]。必要な M6 の可動範囲は、x 傾斜で ±2.5°、y 傾斜で ±2.9°です。ピボット ポイントが M6 ミラー表面の中心にある場合、並進運動は必要ありません。M7 高速ステアリング ミラーは、高時間周波数の振動を補正して、最終的な点広がり関数 (PSF) を安定させます。
2.3 回折限界の公称光学性能
図 7 のスポット図は、静止した最終焦点面 (つまり、下流の科学機器とインターフェイスする焦点面) を示しており、瞳面にある M6 フィールド スキャナーを使用して達成された、視野 (FoV) 全体にわたって非常に安定したビーム フットプリント (具体的には ±0.02°× 0.02°) を示しています。
さらに、このフィールド スキャナーは、試運転段階で軌道上の SALTUS 観測所を補正および較正する上で役立ちます。 M6 フィールド スキャナーは、エアリー ディスク内のすべてのフィールド ポイント ビームを最短設計波長30µm (黒丸で表示) で集束して供給できるため、科学観測中にビームを単一のフィードホーン検出器に向けて順次誘導することができます。図 8 は、最良および最悪のフィールド ポイントの PSF を示しており、膨張可能なプライマリ M1 形状モデルと CCM を含む SALTUS 設計の回折限界公称性能を示しています。約 0.82 ~ 0.94 の範囲のストレール比は、システムの高品質の画像性能を示しています。特に、この回折限界公称画像性能は、SALTUS 分光科学機器 (GUSTO 機器 [14] など) の要件を超えており、許容誤差分析にかなりの余裕があります。これは、堅牢な宇宙観測所アーキテクチャに直接貢献します [2]。
5 結論
展開可能な SALTUS 光学設計は、従来の宇宙望遠鏡ミッションのコストと質量予算のほんの一部で、これまでにないほど大きな光子収集領域を提供します。±0.02°× 0.02°の視野全体にわたって、公称回折限界性能 (つまり、ストレール比が 0.8 以上) を維持します。変形可能な M3 ミラーを使用する適応型光学システムは、展開時に軌道上の収差を補正し、遠赤外線 (far-IR) 科学観測の品質を保証します。許容範囲と迷光の両方の分析により、SALTUS 設計の堅牢で弾力性のある光学性能が科学機器の要件を満たしていることが確認されました。SALTUS 観測所は、宇宙物理学コミュニティに、宇宙の起源に関する画期的な探査を可能にする、大規模で遮るもののない遠赤外線宇宙観測所を提供する準備ができています。










※コメント投稿者のブログIDはブログ作成者のみに通知されます