









トロヤ群の(11351)ロイカスの観測から細長い形状が予想されてますが、画像検索すると接触連星や連星も出てくることからルーシーミッションで近くから観測しないと決まらないのかも。以下、機械翻訳。
ルーシーターゲット(11351)Leucusの光度曲線と掩蔽観測からの凸形状と回転モデル
2020年9月18日に提出
2017年、2018年、2019年の観測期間中に取得したルーシーミッションターゲット(11351)ロイカスの新しい測光ライトカーブ観測を報告します。これらのデータを5つのエポック(Buie et al。2020)中にキャプチャされた恒星の掩蔽と組み合わせて使用して、恒星回転周期、スピン軸の方向、凸型形状モデル、オブジェクトの絶対スケール、その幾何学的アルベド、およびターゲットのフォトメトリックプロパティのモデル。Leucusは、3度の空に投影された半径(1σ)J2000黄道座標(λ = 208 °、 β= + 77 °)またはJ2000赤道座標(RA = 248°、12月= +58°)。恒星期は、 Ps i d= 445.683 ± 0.007h。凸形状モデルは不規則であり、最大寸法は(60.8、39.1、27.8)kmです。凸型モデルは、掩蔽シルエットの全体的な特徴を説明しますが、わずかな偏差は、局所的な凹みと全体的な凹みが存在することを示唆しています。幾何学的なアルベドを決定します pV= 0.043 ± 0.002。導出された位相曲線は、ロイカスのDタイプ分類をサポートします。
キーワード:コンベックスインバージョン—光度曲線—星食–木星トロヤ群—測光

図1. 2017年、2018年、および2019年の出現の複合光度曲線。 データポイントは、周期的な周期で折りたたまれます
それぞれのグラフにリストされ、ゼロ位相はそれぞれのT0エポックに対応しています。 T0は片足の軽い移動時間です
TDBの統一時間枠で表現された修正ユリウス日(MJD)を修正しました。 リストされた一斉期間は正確です
複合材料を折りたたむために使用される数値などは、不確実性なく報告されます。 回転フェーズ1.0を超えるデータポイント
明確にするために繰り返します。 マグニチュードは、観測者と太陽、およびそれぞれの参照から1 auに減少します。
公称線形位相係数β= 0:0395 mag /◦を使用した位相角。

図2.恒星周期スキャンの結果。 各データポイントは、試行を使用して取得された局所最小解に対応します。
恒星周期の反復開始値としての300時間から600時間の範囲の周期。 世界最小445.7時間は最適なソリューションに対応します。

図3. Polarの極方位等距離投影✘2
極ソリューションの。 座標はJ2000で表されます
黄道フレーム。 左側のパネルは北黄道極の中央にあり、右側のパネルは南黄道極の中央にあります。 の軌跡
2つの補完的な最良のソリューションは、白い領域としてはっきりと見えます。
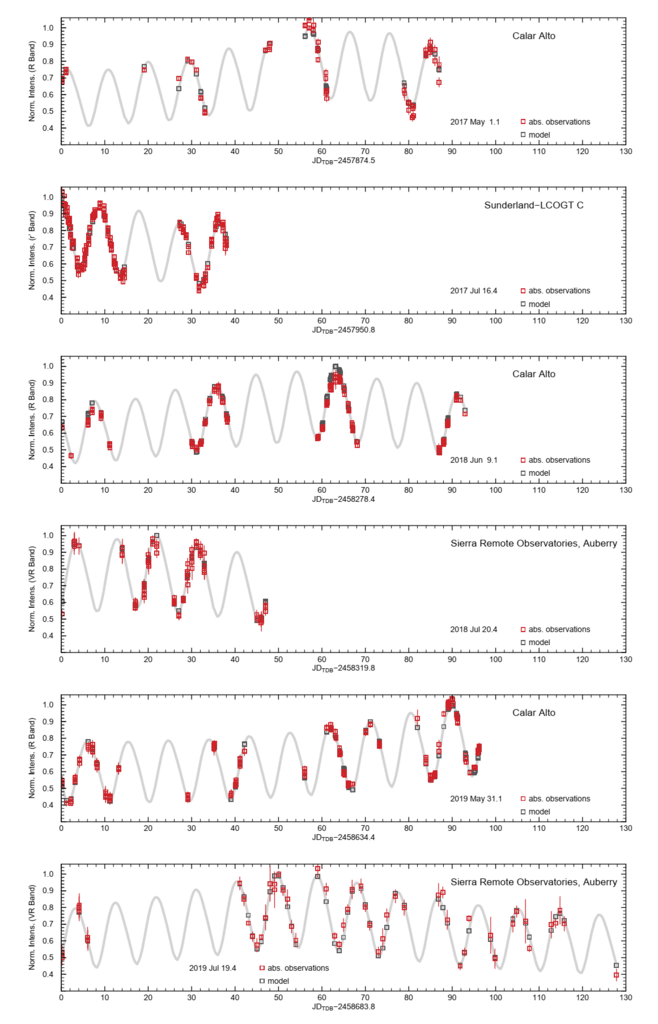
図4.それぞれのモデルのライトカーブとともに表示された観測されたライトカーブ。 データは強度でプロットされ、
それぞれの反対のモデル最大値で1に正規化されます。 ラベルで報告された日付は、
各シーケンスの最初の観測のエポック。

図5. Leucusの最適な凸モデルの隠蔽シルエット(黒い実線)と拒否された補色
モデルは薄い灰色で表示されます。 5つのパネルは、(Buie et al。で報告された5つの掩蔽イベントのエポックに対応しています。
2020)。 赤い円は、それぞれの正の掩蔽和音の開始と終了に対応しています。 赤、緑、青
矢印は、それぞれボディ固定参照フレームのX、Y、Z軸を表します。 θはアスペクト角、つまり
スピン軸とターゲットオブザーバーの方向の間の角度。

図6.展開されたサイコロと同様に配置された、最適なロイカス凸形状の6つの直交投影。 対照的に
理由として、モデリングで使用されるLSLディスク関数の代わりに、ランバートシェーディングが図のレンダリングに使用されます。

図7.球全体に最適なLSLフォトメトリック関数を積分して得られた球積分位相曲線(赤い実線)
曲線)。 青い四角は、絶対キャリブレーションと
ジョンソンVバンドが利用可能でした。 これらのデータポイントは、元のフォトメトリックの強度を乗算することで修正されています
球面モデルの強度と最適な凸形状モデルの強度の比による測定。 このようにして、効果
ジオメトリの表示と観察の変更、および回転変動は削除されます。 データの残りの散布
これは主に、測定のSNRと、絶対校正のゼロ点の不確実性によるものです。 に合う
比較のために、IAU HGシステム、HG1G2システム、および線形位相関数を使用したデータも示しています。

図8. W3の12 µm熱帯域のWISE観測(Grav et al。2012)は、
同じエポックの凸モデル。 明確にするために、回転フェーズ1.0を超えるデータポイントが繰り返されています。 のマグニチュードスケール
WISEの観測は、モデルカーブに最適にフィットするように任意にオフセットされます。 プロットは、WISE観測がロイカスの光曲線の最小値の近くで取得されました。
ルーシーターゲット(11351)Leucusの光度曲線と掩蔽観測からの凸形状と回転モデル
2020年9月18日に提出
2017年、2018年、2019年の観測期間中に取得したルーシーミッションターゲット(11351)ロイカスの新しい測光ライトカーブ観測を報告します。これらのデータを5つのエポック(Buie et al。2020)中にキャプチャされた恒星の掩蔽と組み合わせて使用して、恒星回転周期、スピン軸の方向、凸型形状モデル、オブジェクトの絶対スケール、その幾何学的アルベド、およびターゲットのフォトメトリックプロパティのモデル。Leucusは、3度の空に投影された半径(1σ)J2000黄道座標(λ = 208 °、 β= + 77 °)またはJ2000赤道座標(RA = 248°、12月= +58°)。恒星期は、 Ps i d= 445.683 ± 0.007h。凸形状モデルは不規則であり、最大寸法は(60.8、39.1、27.8)kmです。凸型モデルは、掩蔽シルエットの全体的な特徴を説明しますが、わずかな偏差は、局所的な凹みと全体的な凹みが存在することを示唆しています。幾何学的なアルベドを決定します pV= 0.043 ± 0.002。導出された位相曲線は、ロイカスのDタイプ分類をサポートします。
キーワード:コンベックスインバージョン—光度曲線—星食–木星トロヤ群—測光
図1. 2017年、2018年、および2019年の出現の複合光度曲線。 データポイントは、周期的な周期で折りたたまれます
それぞれのグラフにリストされ、ゼロ位相はそれぞれのT0エポックに対応しています。 T0は片足の軽い移動時間です
TDBの統一時間枠で表現された修正ユリウス日(MJD)を修正しました。 リストされた一斉期間は正確です
複合材料を折りたたむために使用される数値などは、不確実性なく報告されます。 回転フェーズ1.0を超えるデータポイント
明確にするために繰り返します。 マグニチュードは、観測者と太陽、およびそれぞれの参照から1 auに減少します。
公称線形位相係数β= 0:0395 mag /◦を使用した位相角。
図2.恒星周期スキャンの結果。 各データポイントは、試行を使用して取得された局所最小解に対応します。
恒星周期の反復開始値としての300時間から600時間の範囲の周期。 世界最小445.7時間は最適なソリューションに対応します。
図3. Polarの極方位等距離投影✘2
極ソリューションの。 座標はJ2000で表されます
黄道フレーム。 左側のパネルは北黄道極の中央にあり、右側のパネルは南黄道極の中央にあります。 の軌跡
2つの補完的な最良のソリューションは、白い領域としてはっきりと見えます。
図4.それぞれのモデルのライトカーブとともに表示された観測されたライトカーブ。 データは強度でプロットされ、
それぞれの反対のモデル最大値で1に正規化されます。 ラベルで報告された日付は、
各シーケンスの最初の観測のエポック。
図5. Leucusの最適な凸モデルの隠蔽シルエット(黒い実線)と拒否された補色
モデルは薄い灰色で表示されます。 5つのパネルは、(Buie et al。で報告された5つの掩蔽イベントのエポックに対応しています。
2020)。 赤い円は、それぞれの正の掩蔽和音の開始と終了に対応しています。 赤、緑、青
矢印は、それぞれボディ固定参照フレームのX、Y、Z軸を表します。 θはアスペクト角、つまり
スピン軸とターゲットオブザーバーの方向の間の角度。
図6.展開されたサイコロと同様に配置された、最適なロイカス凸形状の6つの直交投影。 対照的に
理由として、モデリングで使用されるLSLディスク関数の代わりに、ランバートシェーディングが図のレンダリングに使用されます。
図7.球全体に最適なLSLフォトメトリック関数を積分して得られた球積分位相曲線(赤い実線)
曲線)。 青い四角は、絶対キャリブレーションと
ジョンソンVバンドが利用可能でした。 これらのデータポイントは、元のフォトメトリックの強度を乗算することで修正されています
球面モデルの強度と最適な凸形状モデルの強度の比による測定。 このようにして、効果
ジオメトリの表示と観察の変更、および回転変動は削除されます。 データの残りの散布
これは主に、測定のSNRと、絶対校正のゼロ点の不確実性によるものです。 に合う
比較のために、IAU HGシステム、HG1G2システム、および線形位相関数を使用したデータも示しています。
図8. W3の12 µm熱帯域のWISE観測(Grav et al。2012)は、
同じエポックの凸モデル。 明確にするために、回転フェーズ1.0を超えるデータポイントが繰り返されています。 のマグニチュードスケール
WISEの観測は、モデルカーブに最適にフィットするように任意にオフセットされます。 プロットは、WISE観測がロイカスの光曲線の最小値の近くで取得されました。










※コメント投稿者のブログIDはブログ作成者のみに通知されます