









『恒星の周期的な減光を利用して系外惑星を検出する。TESSのデータを利用して既知の遠方の太陽系外縁天体を同定することに成功したので、未知の太陽系外縁天体も発見できる』と研究者が言うてます。以下、機械翻訳。
TESSによる海王星以遠天体検出のための最尤系統的効果モデリングとマッチングフィルタリング
2022年9月20日投稿日
我々は、散乱光の影響とポインティングジッタを差し引くための新しい最適化ベースのフレームワークを含む、TESSミッションからのデータを使用して海王星横断天体(TNO)を検索するためのパイプラインを提示する。私たちが採用するバックグラウンド減算手順は、移動平均と組み合わせると、90366 SEDNA、2015 BP519などのTNOを「肉眼」で見ることができます。さらに、この手順により、直接目視で2つのTNO候補を同定することができました(その後、2003 UZ413と2005 RR43と同定されました)。候補TNO(候補TNO)の抽出を自動化するために、異なる距離と軌道傾斜の物体に調整できるマッチングフィルタを適用します。また、3つの海王星横断天体の信号を高い信頼度で自動的に回復することによって、アルゴリズムの性能を実証します。さらに、回収率を大きさと距離の関数としてテストする合成実験を通じて、このアプローチを検証します。距離と大きさの間にはトレードオフがあることがわかります。大きさを制御すると、より速く動く物体を検出するのが簡単です。我々の手法は、250AUの距離にある物体を+21等級で検出し、より近い物体をより薄い大きさで検出することができる。単一の現代GPU(NVIDIA A100)では、このメソッドは5分で1000 2048 x 2048フレームで100の軌道を検索でき、以前のアプローチよりも劇的に高速です。この方法は、TNOおよび潜在的なプラネットナイン候補の大規模な完全自動調査を実行するために使用できます。
キーワード: 太陽系外縁天体 (1705) – 分離天体 (376) – 小惑星 (1065) – 太陽系 (1528) – 惑星理論 (1258) – 空の調査 (1464) – プラネット ナイン (?)
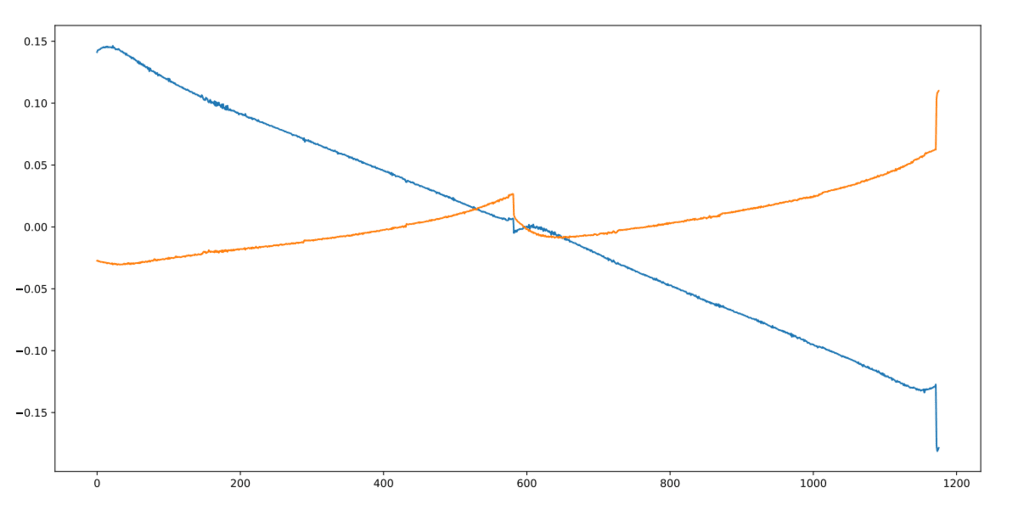
図 1. 基準点のピクセル座標におけるポインティング ジッター
(行と列) 対セクター 5 の時間。X 軸は FFI インデックスです。
Y 軸は 27 日間の変化です。
基準点の位置 (ピクセル単位)。

図 2. セクター 19 の散乱光。出典 https://
heasarc.gsfc.nasa.gov/docs/tess/observing-technical.html

図 3. 純粋なフィルタの整合フィルタの中央行の例
水平翻訳。 各フィルターは T ×C ×R テンソルです。 の
最初の次元は行の厚さ、2 番目の次元は
は列数、3 番目の次元は
時間。 不連続は、発生するタイムジャンプによるものです
TESSがフレームを地球に送信しているとき。

図 4. 5σ 検出の回復率と大きさおよび vel (ピクセル単位の変位)
5. ディスカッション
私たちが提示したアプローチは、TESS データのシステム チック ノイズを直接モデル化します。移動平均で
フィルターを使えば、動いている物体を肉眼で直接識別できます。
一致したフィルターがこれらの同じオブジェクトを見つけること
自信を持って。一致したフィルターはもちろんできます
直接見るのが難しい、より暗い天体を見つけます。私たちは
手動で識別されたオブジェクトのいくつかの例を提供
セクター5では、これは包括的な調査ではなく、単に偶然の発見であったことを強調します.がある
私たちが持っているよりも多くのオブジェクトが見える可能性があります
この論文には含まれていません。
バックグラウンド減算プロセスは非常に高速に実行されます
最新の GPU で。処理にかかる時間はわずか 1 分です。
単一の 2048 × 2048 のフレーム全体に相当するセクター
CCD は、散乱光を解決するために約 40 秒に分割され、背景モデルを解決するために 12 秒に分割されます。
テイラー展開。の計算の複雑さ
の数で一致したフィルター スケールを適用する
適用されたフィルター、および各フィルターのサイズ。として
たとえば、一致したデータを適用するには約 1.8 秒かかります。
単一の NVIDIA RTX 3090 GPU で、サイズ (25, 100) から 2048 × 2048 解像度の 1116 フレームのフィルター。アルゴリズムは、フレーム数、面積に比例してスケーリングします。
一致したフィルター、および一致したフィルターの数。大きい
一致したフィルター (より近いオブジェクトに必要) には時間がかかります
走る。
この方法の主な制限は、非常に暗く遠くにあるオブジェクトを見つけることができません
(残念ながら、これはプラネット ナインの推定値です
することが)。これは、自己減算の問題による可能性が最も高いです。
視差の影響が小さくなり、移動距離が減少します。これは根本的に難しい問題であり、
解決策には、背景モデルのテイラー展開パラメーターをさらに制約することが含まれる場合があります。
5.1.今後の方向性
この方法を TESS データ全体に適用する予定です。
すべてのセクターのすべての候補を抽出するように設定します。私達
その後、誤検知の数をさらに減らすことができます
候補が異なるセクターの複数の観測で発生することを要求することによって。これにより、
特定のセクターで検出のしきい値が高くなる可能性があるため、再現率が高くなり、偽も減少します
ポジティブ。有効にするために、検出結果をオンラインで公開します。
他の観測を通じて候補を確認するために他の人。
TESSによる海王星以遠天体検出のための最尤系統的効果モデリングとマッチングフィルタリング
2022年9月20日投稿日
我々は、散乱光の影響とポインティングジッタを差し引くための新しい最適化ベースのフレームワークを含む、TESSミッションからのデータを使用して海王星横断天体(TNO)を検索するためのパイプラインを提示する。私たちが採用するバックグラウンド減算手順は、移動平均と組み合わせると、90366 SEDNA、2015 BP519などのTNOを「肉眼」で見ることができます。さらに、この手順により、直接目視で2つのTNO候補を同定することができました(その後、2003 UZ413と2005 RR43と同定されました)。候補TNO(候補TNO)の抽出を自動化するために、異なる距離と軌道傾斜の物体に調整できるマッチングフィルタを適用します。また、3つの海王星横断天体の信号を高い信頼度で自動的に回復することによって、アルゴリズムの性能を実証します。さらに、回収率を大きさと距離の関数としてテストする合成実験を通じて、このアプローチを検証します。距離と大きさの間にはトレードオフがあることがわかります。大きさを制御すると、より速く動く物体を検出するのが簡単です。我々の手法は、250AUの距離にある物体を+21等級で検出し、より近い物体をより薄い大きさで検出することができる。単一の現代GPU(NVIDIA A100)では、このメソッドは5分で1000 2048 x 2048フレームで100の軌道を検索でき、以前のアプローチよりも劇的に高速です。この方法は、TNOおよび潜在的なプラネットナイン候補の大規模な完全自動調査を実行するために使用できます。
キーワード: 太陽系外縁天体 (1705) – 分離天体 (376) – 小惑星 (1065) – 太陽系 (1528) – 惑星理論 (1258) – 空の調査 (1464) – プラネット ナイン (?)
図 1. 基準点のピクセル座標におけるポインティング ジッター
(行と列) 対セクター 5 の時間。X 軸は FFI インデックスです。
Y 軸は 27 日間の変化です。
基準点の位置 (ピクセル単位)。
図 2. セクター 19 の散乱光。出典 https://
heasarc.gsfc.nasa.gov/docs/tess/observing-technical.html
図 3. 純粋なフィルタの整合フィルタの中央行の例
水平翻訳。 各フィルターは T ×C ×R テンソルです。 の
最初の次元は行の厚さ、2 番目の次元は
は列数、3 番目の次元は
時間。 不連続は、発生するタイムジャンプによるものです
TESSがフレームを地球に送信しているとき。
図 4. 5σ 検出の回復率と大きさおよび vel (ピクセル単位の変位)
5. ディスカッション
私たちが提示したアプローチは、TESS データのシステム チック ノイズを直接モデル化します。移動平均で
フィルターを使えば、動いている物体を肉眼で直接識別できます。
一致したフィルターがこれらの同じオブジェクトを見つけること
自信を持って。一致したフィルターはもちろんできます
直接見るのが難しい、より暗い天体を見つけます。私たちは
手動で識別されたオブジェクトのいくつかの例を提供
セクター5では、これは包括的な調査ではなく、単に偶然の発見であったことを強調します.がある
私たちが持っているよりも多くのオブジェクトが見える可能性があります
この論文には含まれていません。
バックグラウンド減算プロセスは非常に高速に実行されます
最新の GPU で。処理にかかる時間はわずか 1 分です。
単一の 2048 × 2048 のフレーム全体に相当するセクター
CCD は、散乱光を解決するために約 40 秒に分割され、背景モデルを解決するために 12 秒に分割されます。
テイラー展開。の計算の複雑さ
の数で一致したフィルター スケールを適用する
適用されたフィルター、および各フィルターのサイズ。として
たとえば、一致したデータを適用するには約 1.8 秒かかります。
単一の NVIDIA RTX 3090 GPU で、サイズ (25, 100) から 2048 × 2048 解像度の 1116 フレームのフィルター。アルゴリズムは、フレーム数、面積に比例してスケーリングします。
一致したフィルター、および一致したフィルターの数。大きい
一致したフィルター (より近いオブジェクトに必要) には時間がかかります
走る。
この方法の主な制限は、非常に暗く遠くにあるオブジェクトを見つけることができません
(残念ながら、これはプラネット ナインの推定値です
することが)。これは、自己減算の問題による可能性が最も高いです。
視差の影響が小さくなり、移動距離が減少します。これは根本的に難しい問題であり、
解決策には、背景モデルのテイラー展開パラメーターをさらに制約することが含まれる場合があります。
5.1.今後の方向性
この方法を TESS データ全体に適用する予定です。
すべてのセクターのすべての候補を抽出するように設定します。私達
その後、誤検知の数をさらに減らすことができます
候補が異なるセクターの複数の観測で発生することを要求することによって。これにより、
特定のセクターで検出のしきい値が高くなる可能性があるため、再現率が高くなり、偽も減少します
ポジティブ。有効にするために、検出結果をオンラインで公開します。
他の観測を通じて候補を確認するために他の人。










※コメント投稿者のブログIDはブログ作成者のみに通知されます