SAT_V1_Bullet_Physic_Engine_en_V1.04.pdf の機械翻訳 Ⅲ
結論
キーフレームに加えて、土などの使用など、エンティティをアニメーション化するさまざまな方法を提供しています
"フィジックコントロール"ファイルまたは信号で直接作成した信号の使用の変数
プロセッサ。 この時点では、理解するためにあなた自身のためにいくつかの簡単な例をテストする必要があります
"弾丸"と自分。 土で提供される基本的なコンポーネントを使用すること自由に感じなさい。
paragrah§3を読むことを忘れないでください(の場合には、 "制限事項およびベスト·プラクティス")
あなたの結果についての疑問。
5レベルの高度な
5.1バウンディングボックス«物»
この例では、 "凹"の両方のバウンディングボックス型の使用を練習することを目的とし、
"化合物"。
ステップ1:SketchUpのシーンを構築する
サポート(寸法20メートル* 20メートル* 1メートルの)を描画します。 グループを作成し、その«サポート»と呼びます。
(Fiの寸法を参照してください。櫛を描くグレ20)。それは«櫛»呼び出します。
それぞれ3 1メートル側の立方体を描画し、それらを呼び出す«Cube_1»、«Cube_2»
と«Cube_3»。 キューブは、わずかでは櫛の歯の間に配置されている
それからの距離。
それを登録後、コピー&ペーストを使用しないことが重要です(箇条書きの
属性は、その後)は動作しません。 しかし、それは、キューブをコピー&ペーストすることが可能です
登録前に。
フィジックエンジンの Bullet の技術報告書
21
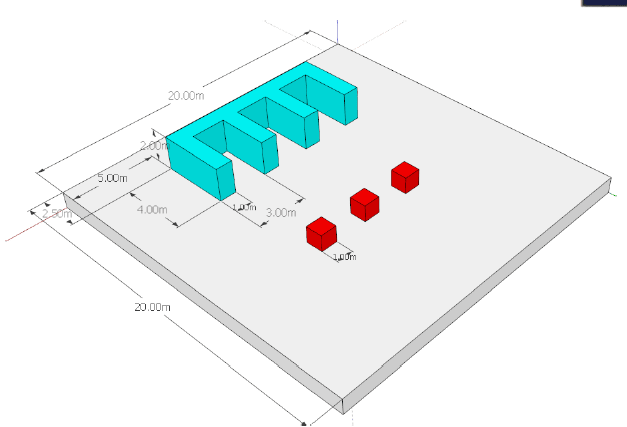
図20:実施例5 - 3Dシーンの描画
ステップ2:箇条書きの登録エンティティ
次の機能を備えたすべてのエンティティを登録します。
oグループ"サポート":形状"キューブ"、タイプ"静的"。
Oグループ"Cube_1"、 "Cube_2"と"Cube_3"形"キューブ"、タイプ"弾丸
"制御されます。
Oグループ"櫛":最初に我々は"凸"型の形状を使用します。タイプ"ユーザー制御"。
ステップ3:キーフレームを作成します。
ので、箇条書きのグループ"櫛"を登録後、この手順を実行することが重要です。
箇条書きに登録すると、座標系を変更します。
グループ"櫛"を選択し、 "キーフレームエディタ"ツールを開き、2次のものを作成
キーフレーム:
キーフレームO 1:初期位置T = 0.0秒。
キーフレームのO 2:櫛は緑の軸に沿って10メートルのために翻訳されています。T = 5秒。
他のすべてのフィールドは変更しないでくださいO。
フィジックエンジンの Bullet の技術報告書 22

図21:実施例5 -キーフレームの作成
グループは"櫛"は、まだ変換プロセッサーを開いて選択し、関連付ける
エンティティ型"時間制御"の"アニメーション"。
ステップ3:タイプ"凸"のバウンディングボックスとの最初の結果
アニメーションを開始します。 この櫛は、キューブを押すが、彼 らは歯に取得しないことがわかります。
これは、櫛のタイプ"凸"のバウンディングボックスの使用によるものである。
フィジックエンジンの Bullet の技術報告書
23

図22:実施例5 -タイプ"凸"のバウンディングボックスを使用した結果
ステップ4:タイプ"Concav"のバウンディングボックス
"凹"とに"凸"から"櫛"グループのバウンディングボックスの形状を変更
アニメーションを再起動します。 キューブが次に歯の間に行くことができていることに気付くでしょうこの時間
これは、アニメーションをよりリアルになります。

図23:実施例5 -バウンディングボックス"Concav"タイプを使用した結果
フィジックエンジンの Bullet の技術報告書
24
ステップ5:タイプ«物»のバウンディングボックス
前のステップでは、タイプが"凹"のバウンディングボックスの精度を実現しています。
しかし、それは、非常にアニメーションの計算時間を増加させる欠点があります
ブレットは、複雑なメッシュを計算するため。 したがって、オブジェクトを分解することができたとき
シンプルなフォーム(グループ"櫛"の場合である)、それは"Compoud"タイプを使用することをお勧めします
形状。
"くし"グループの"アニメーション"の変換を阻害し、隣に移動します
次のアニメーション(このグループはありませんなりとの干渉を防ぐために、サポート
長い)次の例では機能します。
5小学校のエンティティを含むグループ"Comb_2"を作成します:エンティティ"バー"と4
"tooth_4"から"tooth_1"実体。

図24:実施例6 -小学校のエンティティを組み立てることによって櫛の作成
箇条書きの次の機能を備えたグループ"Comb_2"のすべての小学校のエンティティを登録します。
"キューブ"と入力し、 "ユーザー制御"を形作る。
以下の機能を備えた弾丸のグループ"Comb_2"を登録します。形"化合物"
と入力し、 "ユーザー制御"。
以前に行われたように、ために2つのキーフレームと"アニメーション"変換を作成する
軸Yに沿ってグループ"Comb_2"を翻訳する
アニメーションを実行すると、前のケース(のような結果を取得する必要があります
"凹"の形)が、計算時間の偉大な経済である。
フィジックエンジンの Bullet の技術報告書 25

図25:実施例6 -バウンディングボックスを"複合型"を使用した結果
5.2ジョイント
この例では、弾丸の共同の概念を示すことを目指しています。
5.2.1ジョイントを介して世界への単一のエンティティリンク
この最初の例では、キューブに振動を与えることを目指しています。
"キューブ"と呼ばれる1メートル側のグループを作成し、それが、図で提案された配置
以下:
図26:共同実施例7 -キューブの作成
タイプ"キューブ"と"箇条書きの境界ボックスとレッドブルらにこのグループを登録する
制御された"行動。
フィジックエンジンの Bullet の技術報告書 26
"6自由度の制約を作成する"をクリックして、
、ジョイントを作成するために。 位置
図で提案されている世界の中心で座標系の原点
以下。

図27:共同実施例7 -ジョイントの作成
箇条書きのジョイントを登録して、X軸周りの回転のみの1度を有効にしてください。
変更内容を保存することを忘れないでください。
"オブジェクトへのリンクのジョイント"アイコンをクリックし、
キューブと関連付けるために
ジョイント。 ジョイント(その後青いボックスで囲まれるもの)を一度クリックし、Shiftキーを保持する
ボタンダウンとキューブ(その、緑のボックスで囲まなります)をクリックします。
キューブは、現在関節にリンクされているだけでX軸回転を移動できます。
軸。 あなたが選択した場合は間違ったエンティティは、CTRLボタンを押しましょうと選択し
それを解除するエンティティ。 のツール"ジョイントリンクの外に出るために、続行する前に、覚えている
"ツールをクリックして、たとえば、"オブジェクトの選択"

図28:共同実施例7 -キューブと共同リンク
アニメーションを起動します。キューブの周りに振り子運動を持っていることがわかります
関節のX軸
関節のX軸
フィジックエンジンのBulletの技術報告書27
温泉の5.2.2を使用
例2
ない損失が考慮されていないため、前の例では、振り子の動きが停止することはありません
アカウント1つが徐々に動きを停止したい場合は、解決策がでスプリングを使用することです。
小さな減衰パラメータ。我々は、春に2つのグループに接続するために必須であることを思い出してください。ザ
従うべき手順は次のとおりです。
下図に提案されたジョイントの下にグループを配置します。の力から
重力方向はジョイントとの中心によって与えられるように同じ軸上にある
立方体の重心は、キューブが動かなければなりません。アニメーションを起動し、
それを確認してください。
温泉の5.2.2を使用
例2
ない損失が考慮されていないため、前の例では、振り子の動きが停止することはありません
アカウント1つが徐々に動きを停止したい場合は、解決策がでスプリングを使用することです。
小さな減衰パラメータ。我々は、春に2つのグループに接続するために必須であることを思い出してください。ザ
従うべき手順は次のとおりです。
下図に提案されたジョイントの下にグループを配置します。の力から
重力方向はジョイントとの中心によって与えられるように同じ軸上にある
立方体の重心は、キューブが動かなければなりません。アニメーションを起動し、
それを確認してください。

図29:共同実施例8 - キューブを配置する
第二のグループを作成します(再びキューブ)と十分、シーン内の任意の場所にそれを置く
それは今後の動きに干渉しないようにするために、最初にキューブから(図を参照してください。
下记参照)。
第二のグループを作成します(再びキューブ)と十分、シーン内の任意の場所にそれを置く
それは今後の動きに干渉しないようにするために、最初にキューブから(図を参照してください。
下记参照)。

図30:共同実施例8 - 春のサポートfroupの作成
フィジックエンジンのBulletの技術報告書 28
タイプ "キューブ"と "静"の動作のバウンディングボックスで箇条書きで、このグループを登録します。
このグループの目的は、共同で春を関連付けることができるようにすることです。をクリックしてください
"オブジェクトへのリンクジョイント"のアイコン、
タイプ "キューブ"と "静"の動作のバウンディングボックスで箇条書きで、このグループを登録します。
このグループの目的は、共同で春を関連付けることができるようにすることです。をクリックしてください
"オブジェクトへのリンクジョイント"のアイコン、
します(キューブ青のボックスで囲まなるべき関節を一度クリックし
)緑色のボックスに囲まれています。シフトボタンを押したまま、をクリックし
その後赤いボックスで囲まれる2番目のキューブ。つのキューブがリンクされました
ジョイントへ。これは、最初のキューブの動作に何も変更されません
第二キューブ型の "静的"である。モード "オブジェクトへのジョイントリンク"を終了することを忘れないでくださいと
最後に、第キューブを非表示にします。
は、共同のために弾丸のウィンドウに戻ってきました。 "チェックボックスを有効にし春"は、フィールドを埋める
値が0.01以上の値を10とフィールドを埋める "ダンピング"と "剛性"。
アニメーションを起動します。その初期位置であるため、キューブは移動しません
春の平衡位置。したがって、そのからキューブを維持することを意味
平衡位置を使用する必要があります。
)緑色のボックスに囲まれています。シフトボタンを押したまま、をクリックし
その後赤いボックスで囲まれる2番目のキューブ。つのキューブがリンクされました
ジョイントへ。これは、最初のキューブの動作に何も変更されません
第二キューブ型の "静的"である。モード "オブジェクトへのジョイントリンク"を終了することを忘れないでくださいと
最後に、第キューブを非表示にします。
は、共同のために弾丸のウィンドウに戻ってきました。 "チェックボックスを有効にし春"は、フィールドを埋める
値が0.01以上の値を10とフィールドを埋める "ダンピング"と "剛性"。
アニメーションを起動します。その初期位置であるため、キューブは移動しません
春の平衡位置。したがって、そのからキューブを維持することを意味
平衡位置を使用する必要があります。
これを行うために、我々は第三のグループを作成して、ちょうど移動の左側に配置しようとしている
キューブ(下図を参照)。タイプ "ユーザーの動作に箇条書きでこのグループを登録する
制御されます。 "

図31:共同実施例8 - 運動キューブの作成
ためにそれを変換するために、この新しいグループを選択し、変換プロセッサーを開いて
Y軸(相対的な型変換)に沿って毎秒1メートル。
ためにそれを変換するために、この新しいグループを選択し、変換プロセッサーを開いて
Y軸(相対的な型変換)に沿って毎秒1メートル。

フィジックエンジンのBulletの技術報告書 29
単位に注意してください、あなたはメートル毎秒でシフト1.Mを作成する必要があります。
アニメーションを開始します。あなたが翻訳キューブがに勢いを与えていることがわかります
、その振り子を開始します第二キューブ(春と関連付けられているもの)
モーション。また、運動の振幅が徐々に減少するので、ことがわかります
減衰春の。
我々は理解するためには、次のパラメータに異なる値をテストするためにあなたをご招待
それらの効果を持つ自分。
第三キューブのo翻訳スピード。
Oダンピング係数とバネの剛性。
この例では、我々はその初期位置が平衡になるようにキューブを置いた。確かに、時
バネを使用して、ばねの平衡位置が起動する前に、初期位置である
アニメーション。我々は、実施例7のようにキューブの位置を左にしていた場合、振り子の動きはでしょう
左右対称でなかった。
単位に注意してください、あなたはメートル毎秒でシフト1.Mを作成する必要があります。
アニメーションを開始します。あなたが翻訳キューブがに勢いを与えていることがわかります
、その振り子を開始します第二キューブ(春と関連付けられているもの)
モーション。また、運動の振幅が徐々に減少するので、ことがわかります
減衰春の。
我々は理解するためには、次のパラメータに異なる値をテストするためにあなたをご招待
それらの効果を持つ自分。
第三キューブのo翻訳スピード。
Oダンピング係数とバネの剛性。
この例では、我々はその初期位置が平衡になるようにキューブを置いた。確かに、時
バネを使用して、ばねの平衡位置が起動する前に、初期位置である
アニメーション。我々は、実施例7のようにキューブの位置を左にしていた場合、振り子の動きはでしょう
左右対称でなかった。

例3この例では、線形バネの使用方法を示すことを目指しています。そのためには、次のようなシーンを作成する
次のとおりです。
図32:共同実施例9
次のとおりです。
図32:共同実施例9
<iframe width="0" height="0"></iframe>