








アポロ計画の時はアイスランドで訓練してたけどESAはエトナ山で月探査の訓練 以下、機械翻訳。
ローバーと宇宙飛行士がエトナ山の挑戦を完了する
2022年6月7日
ESA/有効化とサポート/宇宙工学と技術
月へのミッションの複雑なロールプレイバージョンでは、ESOCのコントローラーが、地質学者のチームとESAの宇宙飛行士であるトーマスライターと組み合わせて、ローバーの岩石サンプルのコレクションを監督しました。宇宙飛行士は月周回軌道に乗っているかのように振る舞い、実際にはシチリア島のカターニアにあるホテルの部屋に拠点を置いていました。ローバーは23 km離れており、エトナ山の火山の側面に2600m上り坂があります。トーマスがローバーに岩を拾うように命じたとき、彼の手はロボットのグリッパーが感じたもの、つまりリモコンの追加の次元を体験しました。

ThomasReiterがInteractローバーを制御しました
ESAの「Analog-1」プロジェクトのこの最後の部分は、 DLRドイツ航空宇宙センターによって組織されたより大きな複数の機関、複数のローバーキャンペーンの一部として行われました。現代社会を支援する自律型ロボットネットワーク、ARCHESプロジェクトは、ネットワークベースでデータを共同で共有する自律型ロボットの能力を調査しました。
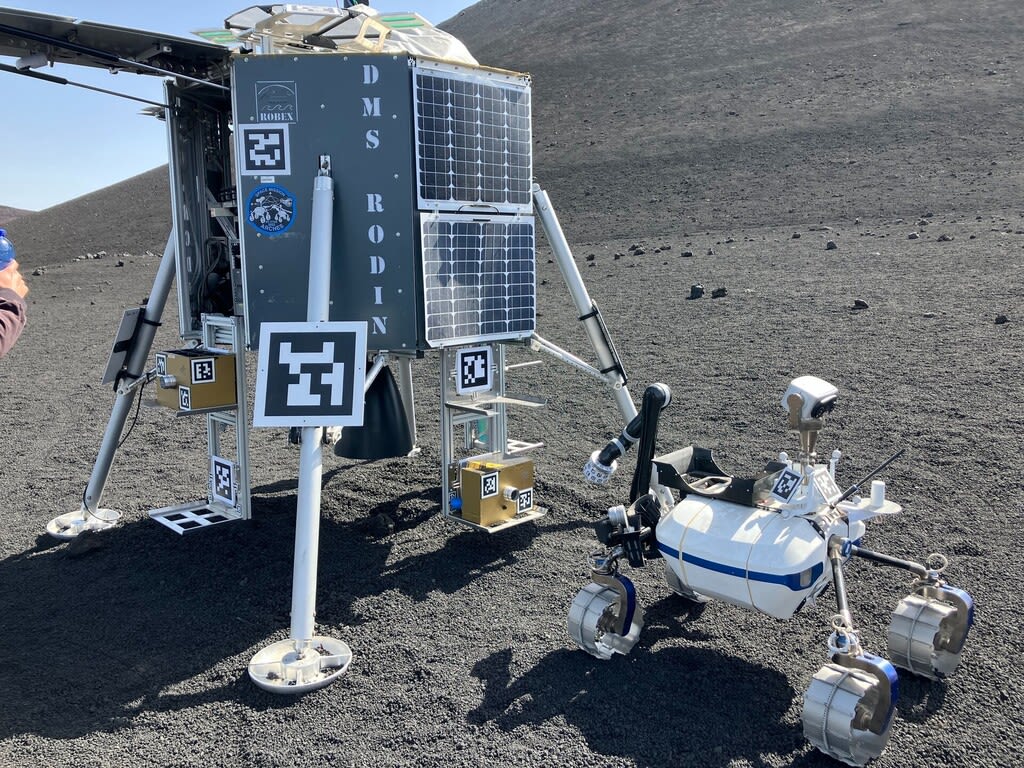
ESAの4輪、2アームのインターアクトローバーは、欧州宇宙機関のヒューマンロボットインタラクションラボによって建設され、火山の険しい斜面に合わせて改造されました。このロボットは、2台のDLRローバー(軽量ローバーユニット1および2)と、ローバーにWiFiと電力を供給する固定の「月着陸船」、および表面マッピング用のドローンで構成されるチームの一部を形成しました。カールスルーエ工科大学は、厳しい地形に最適化されたムカデのようなスカウトクローラーを提供しました。これは、Interactと着陸船の間のリレーとしても機能し、その有効な運用領域を拡大します。

月着陸船によるローバーとの対話
着陸船へのローバーの岩石の配達は、ローバーが月に着陸してサンプルを収集し、ローバーオペレーションセンターと地球上の科学バックルーム、および月のゲートウェイステーションに乗った宇宙飛行士によって導かれる4日間のシミュレートされたミッションの終了を示しました。宇宙飛行士と科学者が近くのホテルの別々の部屋に収容されている間、ローバーの操作はドイツのESOCから調整されました。
「このようなシミュレートされたミッションは、基本的にロールプレイであり、シナリオ内のプレーヤーが完全な没頭を体験することが非常に重要です。」Analog-1プロジェクトマネージャーのKjetilWormnesは言いました。
月着陸船でのLRUローバー
「この場合、それはESOCのローバーオペレーター、科学の奥の部屋の科学者、そしてもちろん私たちのアナログ月ゲートウェイに乗っている宇宙飛行士全員が彼らが月にいると感じる必要があることを意味しました。エトナ山が選ばれました宇宙飛行士と科学者が近くのカターニアのホテルで離れていた間、適切に深く浸ることができる、その優れた月のような地質学のためのアナログサイト。」
最大限のリアリズムを実現するために、ローバー制御システムに1秒の信号遅延が追加されました。これは、コマンドがゲートウェイステーションと月面の間を移動するのにかかる時間に相当します。フォースフィードバック制御方式は、このような遅延で動作するように設計されています。

月ゲートウェイステーション
Kjetil氏は次のように述べています。「難しい設定でしたが、システムは非常にうまく機能し、将来実際にこれを行うときに役立つ月面車の操作について多くのことを学びました。この時点に到達するまでに多くの作業が必要であり、ここエトナでのテストはCOVID-19のために繰り返し遅れました。」
トーマス・ライターは次のようにコメントしています。「地球の地上管制と月を周回する宇宙ステーションの乗組員のコラボレーションについて多くのことを学びました。どちらも地上でローバーを操作します。この「共有」操作は非常に効率的です。はるかに効率的です。どちらかの側が単独でそれを行う場合よりも。」

二腕、四輪のインターアクトローバー
ESAのヒューマンロボットインタラクションラボの責任者であるThomasKrueger氏は、次のように述べています。 。」
「この点に到達するまでには長い道のりがありました。私たちのチームは10年以上前にコンセプトの作業を開始し、徐々に複雑さを増していきました。軌道上で宇宙飛行士が遠隔操作できるシンプルなジョイスティックから始めて、無重力状態での力のフィードバックの知覚を研究しました。その後、私たちの研究室では、宇宙から操作するためのInteractローバーを開発しました。次に、最初の本格的なAnalog-1テストキャンペーンに移りました。これは、国際宇宙ステーションからオランダの格納庫の模擬月面を横切ってルカパルミターノによって操縦されました。」
スカウトクローラー
取り残された唯一のテストは、システムが屋外の自然環境に固有の予測不可能性に対処できることを証明することでした。これは、この最新のエトナ山キャンペーンで達成されました。トーマス・ライターは急な斜面とローバーの車輪が砂に閉じ込められていると争いましたが、それでもサンプルを回収して待機中の着陸船に戻すことができました。
トーマス・クルーガーは次のように付け加えました。すぐにわかったのは、継続的な遠隔監視が宇宙飛行士のオペレーターに非常に厳しいことでした。そこで、現代の自動車が提供するアシスト運転に相当する、プレッシャーの一部を取り除く機能を追加しました。したがって、たとえば、オペレーターは場所を指して、ローバーに安全にそこに着く方法を自分で決定させることができます。そして、そのニューラルネットは、科学的に価値のある岩をそれ自体で認識するようにプログラムされています。

Interactはサンプルを着陸船にもたらします
「こうすることで、オペレーターは、人間が処理するのに最適な種類の優先タスクに注意を向けることができます。これは車輪付き車両にとって厳しい地形であることが判明したので、それがどれほどうまくいったかを見るのは非常に安心でした。」
テストの最終日には、電波天文学を実行するために、ローバーが協力して「月面」全体の最適な位置に「LOFAR」アンテナのアレイを配置しました。

エトナ山のベースキャンプ
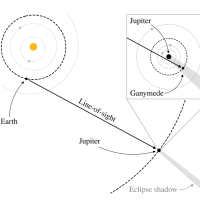
実際、これらのアンテナは実用的なモデルであり、天文学者は山で夜を過ごして電波の空の調査を行い、木星からの電波バーストを拾うことに成功し、火山の月イオを磁場に通過させました。
「私たちは、この10年の後半に、月面のローバーを制御して、地上と宇宙ステーションの間でまさにこの種の共有操作を行う準備ができていると確信しています」とトーマス・ライターは結論付けました。

コントロールのトーマス・ライター
「ちなみに、 ヨーロッパの宇宙飛行士でさえ月の表面に足跡を残す瞬間が来るでしょう! そして、そのようなシナリオでも、ロボットシステムと地上の乗組員の共有操作は非常に効率的です。」
2022年6月7日
ESA/有効化とサポート/宇宙工学と技術
月へのミッションの複雑なロールプレイバージョンでは、ESOCのコントローラーが、地質学者のチームとESAの宇宙飛行士であるトーマスライターと組み合わせて、ローバーの岩石サンプルのコレクションを監督しました。宇宙飛行士は月周回軌道に乗っているかのように振る舞い、実際にはシチリア島のカターニアにあるホテルの部屋に拠点を置いていました。ローバーは23 km離れており、エトナ山の火山の側面に2600m上り坂があります。トーマスがローバーに岩を拾うように命じたとき、彼の手はロボットのグリッパーが感じたもの、つまりリモコンの追加の次元を体験しました。
ThomasReiterがInteractローバーを制御しました
ESAの「Analog-1」プロジェクトのこの最後の部分は、 DLRドイツ航空宇宙センターによって組織されたより大きな複数の機関、複数のローバーキャンペーンの一部として行われました。現代社会を支援する自律型ロボットネットワーク、ARCHESプロジェクトは、ネットワークベースでデータを共同で共有する自律型ロボットの能力を調査しました。
ESAの4輪、2アームのインターアクトローバーは、欧州宇宙機関のヒューマンロボットインタラクションラボによって建設され、火山の険しい斜面に合わせて改造されました。このロボットは、2台のDLRローバー(軽量ローバーユニット1および2)と、ローバーにWiFiと電力を供給する固定の「月着陸船」、および表面マッピング用のドローンで構成されるチームの一部を形成しました。カールスルーエ工科大学は、厳しい地形に最適化されたムカデのようなスカウトクローラーを提供しました。これは、Interactと着陸船の間のリレーとしても機能し、その有効な運用領域を拡大します。
月着陸船によるローバーとの対話
着陸船へのローバーの岩石の配達は、ローバーが月に着陸してサンプルを収集し、ローバーオペレーションセンターと地球上の科学バックルーム、および月のゲートウェイステーションに乗った宇宙飛行士によって導かれる4日間のシミュレートされたミッションの終了を示しました。宇宙飛行士と科学者が近くのホテルの別々の部屋に収容されている間、ローバーの操作はドイツのESOCから調整されました。
「このようなシミュレートされたミッションは、基本的にロールプレイであり、シナリオ内のプレーヤーが完全な没頭を体験することが非常に重要です。」Analog-1プロジェクトマネージャーのKjetilWormnesは言いました。
月着陸船でのLRUローバー
「この場合、それはESOCのローバーオペレーター、科学の奥の部屋の科学者、そしてもちろん私たちのアナログ月ゲートウェイに乗っている宇宙飛行士全員が彼らが月にいると感じる必要があることを意味しました。エトナ山が選ばれました宇宙飛行士と科学者が近くのカターニアのホテルで離れていた間、適切に深く浸ることができる、その優れた月のような地質学のためのアナログサイト。」
最大限のリアリズムを実現するために、ローバー制御システムに1秒の信号遅延が追加されました。これは、コマンドがゲートウェイステーションと月面の間を移動するのにかかる時間に相当します。フォースフィードバック制御方式は、このような遅延で動作するように設計されています。
月ゲートウェイステーション
Kjetil氏は次のように述べています。「難しい設定でしたが、システムは非常にうまく機能し、将来実際にこれを行うときに役立つ月面車の操作について多くのことを学びました。この時点に到達するまでに多くの作業が必要であり、ここエトナでのテストはCOVID-19のために繰り返し遅れました。」
トーマス・ライターは次のようにコメントしています。「地球の地上管制と月を周回する宇宙ステーションの乗組員のコラボレーションについて多くのことを学びました。どちらも地上でローバーを操作します。この「共有」操作は非常に効率的です。はるかに効率的です。どちらかの側が単独でそれを行う場合よりも。」
二腕、四輪のインターアクトローバー
ESAのヒューマンロボットインタラクションラボの責任者であるThomasKrueger氏は、次のように述べています。 。」
「この点に到達するまでには長い道のりがありました。私たちのチームは10年以上前にコンセプトの作業を開始し、徐々に複雑さを増していきました。軌道上で宇宙飛行士が遠隔操作できるシンプルなジョイスティックから始めて、無重力状態での力のフィードバックの知覚を研究しました。その後、私たちの研究室では、宇宙から操作するためのInteractローバーを開発しました。次に、最初の本格的なAnalog-1テストキャンペーンに移りました。これは、国際宇宙ステーションからオランダの格納庫の模擬月面を横切ってルカパルミターノによって操縦されました。」
スカウトクローラー
取り残された唯一のテストは、システムが屋外の自然環境に固有の予測不可能性に対処できることを証明することでした。これは、この最新のエトナ山キャンペーンで達成されました。トーマス・ライターは急な斜面とローバーの車輪が砂に閉じ込められていると争いましたが、それでもサンプルを回収して待機中の着陸船に戻すことができました。
トーマス・クルーガーは次のように付け加えました。すぐにわかったのは、継続的な遠隔監視が宇宙飛行士のオペレーターに非常に厳しいことでした。そこで、現代の自動車が提供するアシスト運転に相当する、プレッシャーの一部を取り除く機能を追加しました。したがって、たとえば、オペレーターは場所を指して、ローバーに安全にそこに着く方法を自分で決定させることができます。そして、そのニューラルネットは、科学的に価値のある岩をそれ自体で認識するようにプログラムされています。
Interactはサンプルを着陸船にもたらします
「こうすることで、オペレーターは、人間が処理するのに最適な種類の優先タスクに注意を向けることができます。これは車輪付き車両にとって厳しい地形であることが判明したので、それがどれほどうまくいったかを見るのは非常に安心でした。」
テストの最終日には、電波天文学を実行するために、ローバーが協力して「月面」全体の最適な位置に「LOFAR」アンテナのアレイを配置しました。
エトナ山のベースキャンプ
実際、これらのアンテナは実用的なモデルであり、天文学者は山で夜を過ごして電波の空の調査を行い、木星からの電波バーストを拾うことに成功し、火山の月イオを磁場に通過させました。
「私たちは、この10年の後半に、月面のローバーを制御して、地上と宇宙ステーションの間でまさにこの種の共有操作を行う準備ができていると確信しています」とトーマス・ライターは結論付けました。
コントロールのトーマス・ライター
「ちなみに、 ヨーロッパの宇宙飛行士でさえ月の表面に足跡を残す瞬間が来るでしょう! そして、そのようなシナリオでも、ロボットシステムと地上の乗組員の共有操作は非常に効率的です。」









※コメント投稿者のブログIDはブログ作成者のみに通知されます