








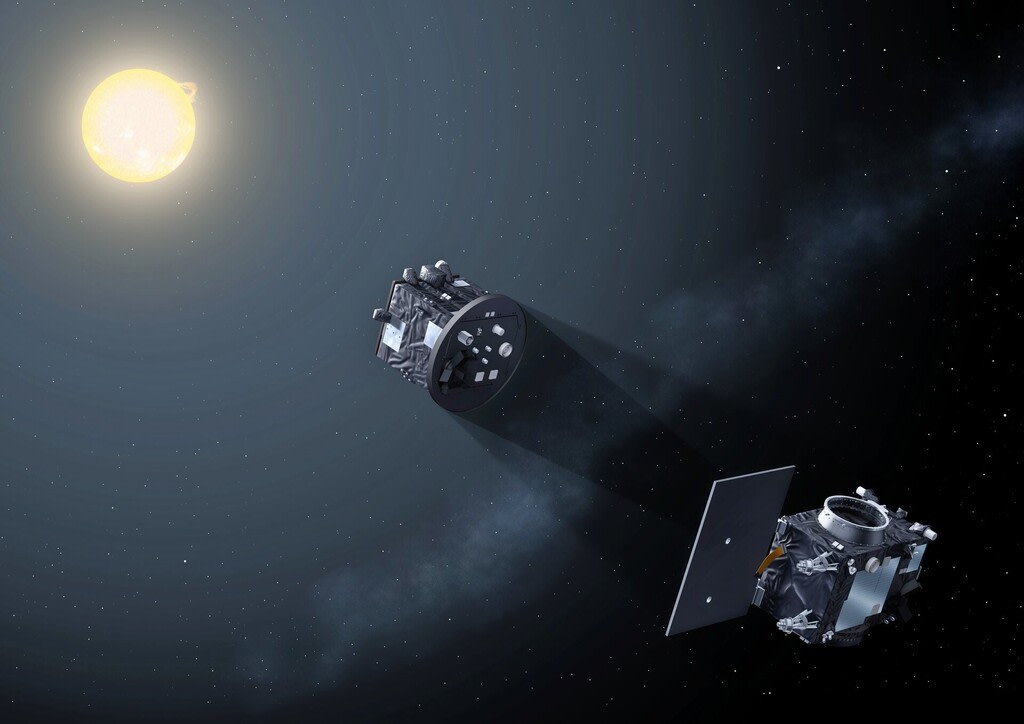
太陽のコロナを観測するために衛星軌道を編隊飛行。地球からの反射光の影響を最小にするため遠地点付近で姿勢と間隔を制御する。以下、自動翻訳。
Proba-3の編隊飛行センサーのコリドーテスト
2021年3月29日
ESA/有効化とサポート/宇宙工学と技術/プロバミッション
ESAの最大の施設で最も長い回廊は、機関の最も野心的な将来のミッションの1つであるProba-3のテストサイトになりました。このミッションを構成する2つの衛星は、一方が他方に影を落とし、太陽の幽霊のような雰囲気の内部領域を明らかにするように整列します。しかし、そのような精密な編隊飛行は、一方の衛星がもう一方の衛星にロックできるようにする視覚ベースのセンサーシステムを介してのみ可能になります。
Proba-3に加えてすべての方法25メートル、250メートルまでまでの距離を変化させる形成再構成操縦を行いながらペアは、冠状観察のため離れた公称144メートルで飛行します。

コリドーテストの準備
これを可能にするこのセンサーシステムのテストは、オランダのノールドワイクにあるESAのESTECテクニカルセンターで、プロジェクトオフィスと技術研究所および施設の衛星テストセンターを結ぶ長さ230mのメインコリドーを使用して行われました。
ライトを暗くし、展示物を取り外して、カメラのテストバージョンで、廊下の全長にわたって飛行のようなターゲットベアリングLEDディスプレイを観察できるようにしました。

Proba-3の衛星ペア
「このビジョンベースのセンサーシステムは、2つの衛星がフォーメーションを取得し、軌道ごとに1回再取得する最初の方法です」と、ESAのProba-3プロジェクトマネージャーであるDamienGalano氏は説明します。
「これは、ペアがお互いを見つけて、20〜250 mの距離にわたって数ミリメートルの精度まで相対位置を推定できるように設計されており、宇宙船が自律的に機体を形成できるようにします。そのため、テストには長いスペースが必要でした。このような屋内スペースは、風やその他の障害によってセットアップが妨げられる屋外よりもはるかに制御しやすくなっています。」

ターゲットのカメラの視点
2023年に打ち上げられる予定の、Proba-3の2つのメートルスケールの衛星は、一方の「掩蔽」がもう一方の「コロナグラフ」のまばゆいばかりの太陽円盤を遮るように並んでいます。これにより、研究者は、短い日食の間を除いて、通常は強い日光に隠されている、かすかな大気の内層、つまり「コロナ」を持続的に見ることができます。
「2つの衛星は、細長いまたは非常に楕円形の19.6時間の軌道で一緒に飛行します」と、Proba-3ミッションシステムエンジニアのRaphaelRougeotは言います。

Proba-3
「この軌道全体で編隊飛行を積極的に行うことは現実的ではありません。代わりに、衛星は、軌道の60 000 kmの高度の最上部(または「遠地点」)の周りを6時間だけ編隊飛行します。残りの時間は、ミッションの安全性を確保する自由飛行の相対軌道に操縦されます。それから、彼らの軌道の底から出てくる-または「ペリジー」-彼らはお互いを再獲得しなければなりません。」
一連のカメラがオカルター衛星に搭載され、コロナグラフのパルスLEDを探します。各コーナーに1つと、右側に小さな正方形のパターンがあり、衛星の向きを明らかにし、近接操作を可能にします。

ESAの技術的中心
ラファエルは次のように付け加えています。「視野の異なる2台のカメラが必要です。最初のカメラは、コロナグラフを見つけるために使用される15度の広い視野を持っています。2つ目は、必要なミリメートルスケールの精度を提供するために視野が狭くなっています。別のセンサーにより、画像取得をLEDパルスと同期させることができます。LEDからの光は、コロナグラフでの太陽の偽の反射や背景の明るい地球で失われる可能性があるため、このような正確な同期(1000万分の1秒まで)が必要です。さらに、カメラには近赤外線LEDライト用に最適化されたフィルターも搭載されます。」
カメラシステムと平方メートルのLEDベアリングターゲットのテストは、廊下の長さに沿って30 m間隔で配置され、有望な結果が得られました。太陽の迷光をシミュレートするために、正しいスペクトル特性を持つ特定のランプが使用されました。このランプは、このテストのためにESTECの光学研究所によって特別に特徴付けられました。

GRALSでのテスト
フォローアップとして、LEDターゲットの小型バージョンが、ESTECのガイダンスナビゲーションおよび制御ランデブー、進入および着陸シミュレーター、またはGRALSのレールに取り付けられたロボットアームに取り付けられました。この33mの長さの施設は、接近、ランデブー、宇宙オブジェクト間のドッキングをシミュレートするために使用されます。
Proba-3ガイダンスナビゲーションおよび制御システムエンジニアのJonathanGrzymisch氏は、次のように説明しています。「ロボットアームは、カメラの監視中に事前にプログラムされたパターンに沿ってLEDターゲットを動かし、機器ソフトウェアが相対的な動的軌道を継続的に計算できるようにしました。これにより、決定論的な動的ベースでセンサーのパフォーマンスを特徴付けることができます。ESTECの施設管理と関連する技術セクションの協力のおかげで、両方のテストはうまく機能しました。」
Proba-3の視覚ベースのセンサーシステムは、デンマーク工科大学(DTU)によって開発されました。COVID-19の制限により、チームはESTECに直接立ち会うことができませんでしたが、ESAエンジニアがテストを準備して実行している間、リモートでテストをサポートしました。

Proba-3ファクトシート
Proba-3: Dancing with the stars
Proba-3:星と踊る
Proba-3の編隊飛行センサーのコリドーテスト
2021年3月29日
ESA/有効化とサポート/宇宙工学と技術/プロバミッション
ESAの最大の施設で最も長い回廊は、機関の最も野心的な将来のミッションの1つであるProba-3のテストサイトになりました。このミッションを構成する2つの衛星は、一方が他方に影を落とし、太陽の幽霊のような雰囲気の内部領域を明らかにするように整列します。しかし、そのような精密な編隊飛行は、一方の衛星がもう一方の衛星にロックできるようにする視覚ベースのセンサーシステムを介してのみ可能になります。
Proba-3に加えてすべての方法25メートル、250メートルまでまでの距離を変化させる形成再構成操縦を行いながらペアは、冠状観察のため離れた公称144メートルで飛行します。
コリドーテストの準備
これを可能にするこのセンサーシステムのテストは、オランダのノールドワイクにあるESAのESTECテクニカルセンターで、プロジェクトオフィスと技術研究所および施設の衛星テストセンターを結ぶ長さ230mのメインコリドーを使用して行われました。
ライトを暗くし、展示物を取り外して、カメラのテストバージョンで、廊下の全長にわたって飛行のようなターゲットベアリングLEDディスプレイを観察できるようにしました。
Proba-3の衛星ペア
「このビジョンベースのセンサーシステムは、2つの衛星がフォーメーションを取得し、軌道ごとに1回再取得する最初の方法です」と、ESAのProba-3プロジェクトマネージャーであるDamienGalano氏は説明します。
「これは、ペアがお互いを見つけて、20〜250 mの距離にわたって数ミリメートルの精度まで相対位置を推定できるように設計されており、宇宙船が自律的に機体を形成できるようにします。そのため、テストには長いスペースが必要でした。このような屋内スペースは、風やその他の障害によってセットアップが妨げられる屋外よりもはるかに制御しやすくなっています。」
ターゲットのカメラの視点
2023年に打ち上げられる予定の、Proba-3の2つのメートルスケールの衛星は、一方の「掩蔽」がもう一方の「コロナグラフ」のまばゆいばかりの太陽円盤を遮るように並んでいます。これにより、研究者は、短い日食の間を除いて、通常は強い日光に隠されている、かすかな大気の内層、つまり「コロナ」を持続的に見ることができます。
「2つの衛星は、細長いまたは非常に楕円形の19.6時間の軌道で一緒に飛行します」と、Proba-3ミッションシステムエンジニアのRaphaelRougeotは言います。
Proba-3
「この軌道全体で編隊飛行を積極的に行うことは現実的ではありません。代わりに、衛星は、軌道の60 000 kmの高度の最上部(または「遠地点」)の周りを6時間だけ編隊飛行します。残りの時間は、ミッションの安全性を確保する自由飛行の相対軌道に操縦されます。それから、彼らの軌道の底から出てくる-または「ペリジー」-彼らはお互いを再獲得しなければなりません。」
一連のカメラがオカルター衛星に搭載され、コロナグラフのパルスLEDを探します。各コーナーに1つと、右側に小さな正方形のパターンがあり、衛星の向きを明らかにし、近接操作を可能にします。
ESAの技術的中心
ラファエルは次のように付け加えています。「視野の異なる2台のカメラが必要です。最初のカメラは、コロナグラフを見つけるために使用される15度の広い視野を持っています。2つ目は、必要なミリメートルスケールの精度を提供するために視野が狭くなっています。別のセンサーにより、画像取得をLEDパルスと同期させることができます。LEDからの光は、コロナグラフでの太陽の偽の反射や背景の明るい地球で失われる可能性があるため、このような正確な同期(1000万分の1秒まで)が必要です。さらに、カメラには近赤外線LEDライト用に最適化されたフィルターも搭載されます。」
カメラシステムと平方メートルのLEDベアリングターゲットのテストは、廊下の長さに沿って30 m間隔で配置され、有望な結果が得られました。太陽の迷光をシミュレートするために、正しいスペクトル特性を持つ特定のランプが使用されました。このランプは、このテストのためにESTECの光学研究所によって特別に特徴付けられました。
GRALSでのテスト
フォローアップとして、LEDターゲットの小型バージョンが、ESTECのガイダンスナビゲーションおよび制御ランデブー、進入および着陸シミュレーター、またはGRALSのレールに取り付けられたロボットアームに取り付けられました。この33mの長さの施設は、接近、ランデブー、宇宙オブジェクト間のドッキングをシミュレートするために使用されます。
Proba-3ガイダンスナビゲーションおよび制御システムエンジニアのJonathanGrzymisch氏は、次のように説明しています。「ロボットアームは、カメラの監視中に事前にプログラムされたパターンに沿ってLEDターゲットを動かし、機器ソフトウェアが相対的な動的軌道を継続的に計算できるようにしました。これにより、決定論的な動的ベースでセンサーのパフォーマンスを特徴付けることができます。ESTECの施設管理と関連する技術セクションの協力のおかげで、両方のテストはうまく機能しました。」
Proba-3の視覚ベースのセンサーシステムは、デンマーク工科大学(DTU)によって開発されました。COVID-19の制限により、チームはESTECに直接立ち会うことができませんでしたが、ESAエンジニアがテストを準備して実行している間、リモートでテストをサポートしました。
Proba-3ファクトシート
Proba-3: Dancing with the stars
Proba-3:星と踊る










※コメント投稿者のブログIDはブログ作成者のみに通知されます