








太陽の寿命が後50億年だから数十億年間安定してれば十分なのでは?太陽が白色矮星になっても土星系が安定しなきゃいけない理由がある?以下、機械翻訳。
土星の傾斜の結果としてのタイタンの将来の不安定化
2021年10月11日に提出
コンテキスト:タイタンの移動と土星の長期的なスピン軌道共鳴における捕捉の可能性の結果として、最近の研究は、土星の傾斜角が今日着実に増加し、今後数十億年で大きな値に達する可能性があることを示しています。赤道傾斜角の高い惑星の周りの衛星は、ラプラス半径の近くで不安定であることが知られていますが、これまでに使用された近似は、この体制では無効になっています。
目的:惑星が経年的なスピン軌道共鳴でロックされている間に衛星がラプラス半径を横切るときの惑星とその衛星の振る舞いを調査することを目指しています。
方法:以前の作品を拡張し、ラプラス表面の概念を再検討します。これを使用して、惑星のスピン軸と衛星のダイナミクスを結合する平均化された分析モデルを構築します。
結果:ダイナミクスが臨界点S1の周りに組織化されていることを示します。この臨界点では、位相空間構造が特異であり、90°の傾斜角とラプラス半径の近くにあります。惑星のスピン軸歳差運動速度が、衛星が外向きまたは内向きに移動する間、共鳴によって固定されたままである場合、S1は、システムが進化するように強制されるアトラクターとして機能します。それがS1の近くに達すると、惑星が共鳴から追い出されるか、衛星が惑星に放出されるか衝突するために、システム全体が故障します。
結論:タイタンの移動が将来停止されない場合、タイタンと土星は、タイタンの移動率に応じて、数十億年から数百億年の間で不安定になる可能性があります。進化はタイタンを不安定にし、土星を90°の赤道傾斜角に向かわせるでしょう。私たちの発見は天王星に重要な結果をもたらすかもしれません。それらはまた、いくつかのスーパーパフ太陽系外惑星を説明するためにしばしば提唱される構成である、正面を向いた巨大なリングを備えた通過する太陽系外惑星を生成するための簡単なメカニズムを提供します。

図1.円軌道のハミルトン関数Hのレベル曲線。パラメータはa / rM = 1.1およびε=40度です。
セパラトリックスが表示されます。より太い黒い曲線によって。 色付きの点は3種類を表しています
本文のようにラベル付けされた平衡点(「ラプラス状態」)の数。 暗い色は、δQ= 0にある点P1とP3、およびにあるP2に使用されます。
δQ=π/ 2。 対称平衡点には明るい色が使用されます
これは、軌道運動が逆になっている同じラプラス状態に対応します。図2aは、球にプロットされた同じ位相ポートレートを示しています。
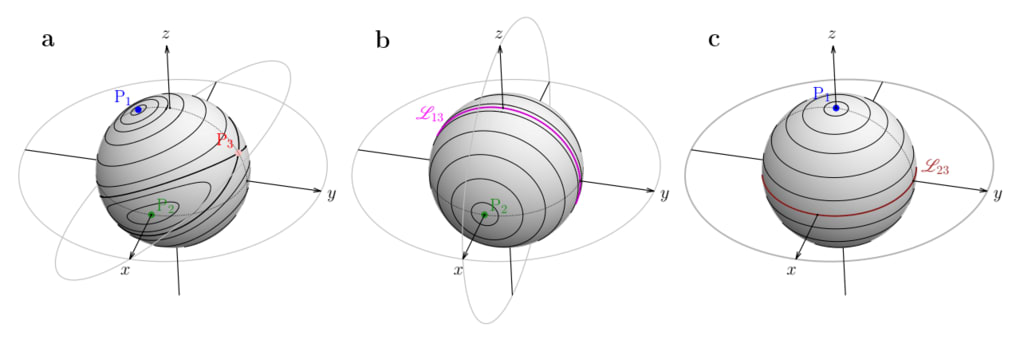
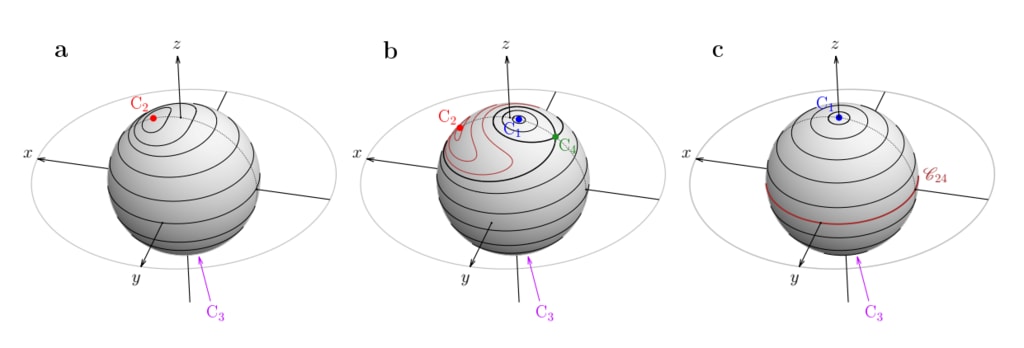
図2.球にプロットされたe = 0のハミルトン関数Hのレベル曲線。 z軸は惑星のスピン軸に沿っています。 x軸は
赤道面と黄道面の交点(つまり、惑星の両方の分点を結ぶ線)に沿って、昇順に向けられます
星のノード。赤道のxy平面と黄道平面は、2つの外側の灰色の円で強調表示されています。球上の点は、
座標(x、y、z)=(sinIQsinδQ、-sinIQcosδQ、cosIQ)を持つ衛星の軌道角運動量の先端。カラーコードは
図1と同じ。パネルa:図1と同じパラメーター。パネルb:a / rM = 1およびε=90◦で定義されるパラメーター領域S1。
。マゼンタの曲線L13は、P1とP3から出現するセパラトリックスのマージから生じる無限の安定した平衡で構成されています。パネルc:パラメータ領域S2、
a / rM> 0およびε= 0度で定義(または180度)。茶色の曲線L23は、P2とのマージから生じる無限の安定平衡で構成されています。
P3から出現するセパラトリックス。

図3.a / rMの関数としてのラプラス状態の位置。 各パネル
εの固定値を特徴としています(ラベルを参照)。 レベルIQ =εは次のように示されます。
水平の点線。 カラーコードは図1と同じです。
中央のパネルの黒い縦線は、縮退した平衡を示しています P1とP3のマージによって生成された円。

図4.εの関数としてのラプラス状態の位置。 各パネルa / rMの固定値(上から下へ:0.01、0.95、1、1.05、および20)。 色は図3と同じ意味です。

図5.ほぼ円軌道上の質量のない衛星のダイナミクスを支配するパラメータ空間の領域の要約。
フェーズ空間には3つの平衡点(「ラプラス状態」)があり、その中にはP1とP2は傾斜の変化に対して安定しており、P3は不安定です。
ある時点でパラメータ空間のS1、P1とP3は平衡状態に縮退します
傾きの変化に対して安定している円L13。 のリージョンS2
パラメータ空間、P2とP3は平衡円L23に縮退します
それは傾斜の変化に対して安定しています。 領域E1、E2、およびE3では、それぞれ、P1、P2、およびP3は離心率の変動に対して不安定です。 地域で
S2∪E2、L23は、離心率の変動に対して不安定です。 ポイントS1で、L13は赤道傾斜があれば、離心率の変動に対して安定衛星のcos2を検証します
IQ 61/5。

図6.パラメーターの関数としてのラプラス状態P1の傾斜(式14を参照)。 一部のレベル曲線は黒でラベル付けされています。 重要
半径とrMおよびrFは白で表されます。 a = rMでは、P1は正確に存在します
赤道と黄道の中間(つまり、プログレードスピンのIQ =ε/ 2)。 0度から180度までのIQの突然の移行
ε=90度では座標の特異点。 S1ポイントは実際の特異点です(テキストを参照)。

図7.ラプラス状態周辺の小さな傾斜振動の周期
パラメータの関数としてのP1。 期間は式で与えられます。 (16)とここでは、特性周期τ=2π/κの単位で表されます。 いくつか
レベル曲線は強調表示され、黒でラベル付けされています。 特異点S1赤で示されています。

図8.ラプラス状態P1が存在するパラメーター空間の領域E1
離心率の変動に対して不安定です。 背景色は
µ^2 1の正規化された値、負の値(安定)の場合は青、赤は
正の値の場合(不安定)。 E1の境界線は次のように強調表示されます
式の閉形式の式を使用して得られた黒い輪郭。 (21)
および(22)。 領域E1は、茶色の破線の内側に完全に含まれています。
その左と右の限界r1とr2は式で与えられます。 (20)、そしてその
下限と上限は式で与えられます。 (23)。 ラプラス状態P1は
点S1で単数、ここでµ^2 1不連続です。
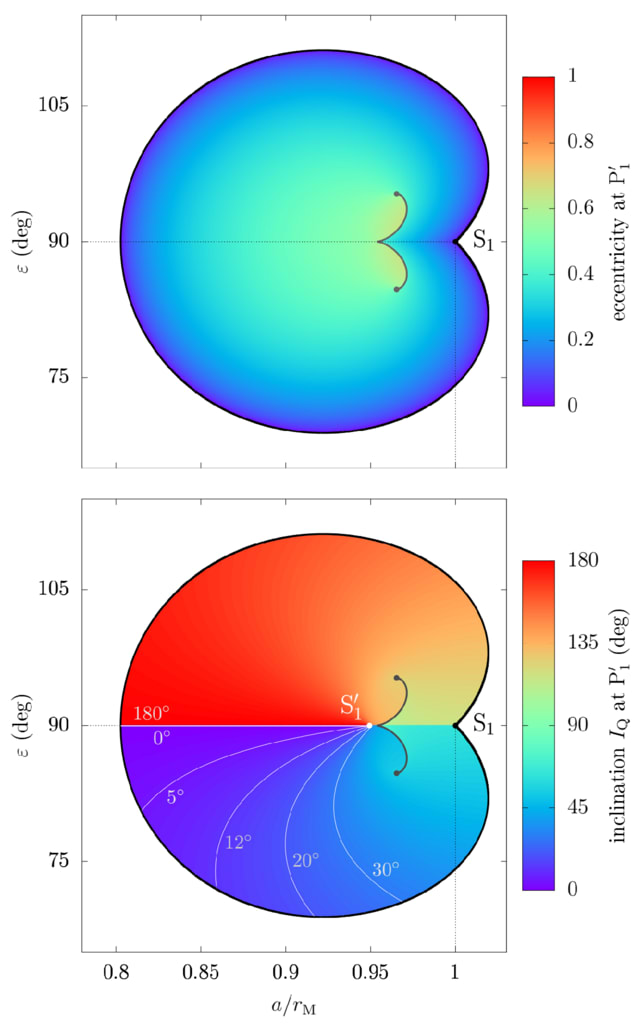
図9.離心率平衡P'1での衛星の離心率と傾斜。 図10に示すように、灰色の線に沿って平衡の三次元表面がカットされました。
レベル曲線は白でプロットされます(ラベルを参照)。 u = r^5 m/a^5に注意してください
灰色の切断線の端の座標はu =27√2/32およびcos^2ε=(5−2√6)/ 12上下のポイントで、u =25√30/108およびε=90度真ん中に。
土星の傾斜の結果としてのタイタンの将来の不安定化
2021年10月11日に提出
コンテキスト:タイタンの移動と土星の長期的なスピン軌道共鳴における捕捉の可能性の結果として、最近の研究は、土星の傾斜角が今日着実に増加し、今後数十億年で大きな値に達する可能性があることを示しています。赤道傾斜角の高い惑星の周りの衛星は、ラプラス半径の近くで不安定であることが知られていますが、これまでに使用された近似は、この体制では無効になっています。
目的:惑星が経年的なスピン軌道共鳴でロックされている間に衛星がラプラス半径を横切るときの惑星とその衛星の振る舞いを調査することを目指しています。
方法:以前の作品を拡張し、ラプラス表面の概念を再検討します。これを使用して、惑星のスピン軸と衛星のダイナミクスを結合する平均化された分析モデルを構築します。
結果:ダイナミクスが臨界点S1の周りに組織化されていることを示します。この臨界点では、位相空間構造が特異であり、90°の傾斜角とラプラス半径の近くにあります。惑星のスピン軸歳差運動速度が、衛星が外向きまたは内向きに移動する間、共鳴によって固定されたままである場合、S1は、システムが進化するように強制されるアトラクターとして機能します。それがS1の近くに達すると、惑星が共鳴から追い出されるか、衛星が惑星に放出されるか衝突するために、システム全体が故障します。
結論:タイタンの移動が将来停止されない場合、タイタンと土星は、タイタンの移動率に応じて、数十億年から数百億年の間で不安定になる可能性があります。進化はタイタンを不安定にし、土星を90°の赤道傾斜角に向かわせるでしょう。私たちの発見は天王星に重要な結果をもたらすかもしれません。それらはまた、いくつかのスーパーパフ太陽系外惑星を説明するためにしばしば提唱される構成である、正面を向いた巨大なリングを備えた通過する太陽系外惑星を生成するための簡単なメカニズムを提供します。
図1.円軌道のハミルトン関数Hのレベル曲線。パラメータはa / rM = 1.1およびε=40度です。
セパラトリックスが表示されます。より太い黒い曲線によって。 色付きの点は3種類を表しています
本文のようにラベル付けされた平衡点(「ラプラス状態」)の数。 暗い色は、δQ= 0にある点P1とP3、およびにあるP2に使用されます。
δQ=π/ 2。 対称平衡点には明るい色が使用されます
これは、軌道運動が逆になっている同じラプラス状態に対応します。図2aは、球にプロットされた同じ位相ポートレートを示しています。
図2.球にプロットされたe = 0のハミルトン関数Hのレベル曲線。 z軸は惑星のスピン軸に沿っています。 x軸は
赤道面と黄道面の交点(つまり、惑星の両方の分点を結ぶ線)に沿って、昇順に向けられます
星のノード。赤道のxy平面と黄道平面は、2つの外側の灰色の円で強調表示されています。球上の点は、
座標(x、y、z)=(sinIQsinδQ、-sinIQcosδQ、cosIQ)を持つ衛星の軌道角運動量の先端。カラーコードは
図1と同じ。パネルa:図1と同じパラメーター。パネルb:a / rM = 1およびε=90◦で定義されるパラメーター領域S1。
。マゼンタの曲線L13は、P1とP3から出現するセパラトリックスのマージから生じる無限の安定した平衡で構成されています。パネルc:パラメータ領域S2、
a / rM> 0およびε= 0度で定義(または180度)。茶色の曲線L23は、P2とのマージから生じる無限の安定平衡で構成されています。
P3から出現するセパラトリックス。
図3.a / rMの関数としてのラプラス状態の位置。 各パネル
εの固定値を特徴としています(ラベルを参照)。 レベルIQ =εは次のように示されます。
水平の点線。 カラーコードは図1と同じです。
中央のパネルの黒い縦線は、縮退した平衡を示しています P1とP3のマージによって生成された円。
図4.εの関数としてのラプラス状態の位置。 各パネルa / rMの固定値(上から下へ:0.01、0.95、1、1.05、および20)。 色は図3と同じ意味です。
図5.ほぼ円軌道上の質量のない衛星のダイナミクスを支配するパラメータ空間の領域の要約。
フェーズ空間には3つの平衡点(「ラプラス状態」)があり、その中にはP1とP2は傾斜の変化に対して安定しており、P3は不安定です。
ある時点でパラメータ空間のS1、P1とP3は平衡状態に縮退します
傾きの変化に対して安定している円L13。 のリージョンS2
パラメータ空間、P2とP3は平衡円L23に縮退します
それは傾斜の変化に対して安定しています。 領域E1、E2、およびE3では、それぞれ、P1、P2、およびP3は離心率の変動に対して不安定です。 地域で
S2∪E2、L23は、離心率の変動に対して不安定です。 ポイントS1で、L13は赤道傾斜があれば、離心率の変動に対して安定衛星のcos2を検証します
IQ 61/5。
図6.パラメーターの関数としてのラプラス状態P1の傾斜(式14を参照)。 一部のレベル曲線は黒でラベル付けされています。 重要
半径とrMおよびrFは白で表されます。 a = rMでは、P1は正確に存在します
赤道と黄道の中間(つまり、プログレードスピンのIQ =ε/ 2)。 0度から180度までのIQの突然の移行
ε=90度では座標の特異点。 S1ポイントは実際の特異点です(テキストを参照)。
図7.ラプラス状態周辺の小さな傾斜振動の周期
パラメータの関数としてのP1。 期間は式で与えられます。 (16)とここでは、特性周期τ=2π/κの単位で表されます。 いくつか
レベル曲線は強調表示され、黒でラベル付けされています。 特異点S1赤で示されています。
図8.ラプラス状態P1が存在するパラメーター空間の領域E1
離心率の変動に対して不安定です。 背景色は
µ^2 1の正規化された値、負の値(安定)の場合は青、赤は
正の値の場合(不安定)。 E1の境界線は次のように強調表示されます
式の閉形式の式を使用して得られた黒い輪郭。 (21)
および(22)。 領域E1は、茶色の破線の内側に完全に含まれています。
その左と右の限界r1とr2は式で与えられます。 (20)、そしてその
下限と上限は式で与えられます。 (23)。 ラプラス状態P1は
点S1で単数、ここでµ^2 1不連続です。
図9.離心率平衡P'1での衛星の離心率と傾斜。 図10に示すように、灰色の線に沿って平衡の三次元表面がカットされました。
レベル曲線は白でプロットされます(ラベルを参照)。 u = r^5 m/a^5に注意してください
灰色の切断線の端の座標はu =27√2/32およびcos^2ε=(5−2√6)/ 12上下のポイントで、u =25√30/108およびε=90度真ん中に。










※コメント投稿者のブログIDはブログ作成者のみに通知されます