









オシリスレックスは周回軌道から着陸地点に向かう時に大きく特徴のある岩を目印として降下してタッチダウンする予定。以下、機械翻訳。
Bennuの巨石がNASAのOSIRIS-RExのビーコンとして輝く
この夏、探査機OSIRIS-RExは、小惑星の表面に触れ、そのサンプルを収集し、安全に後退するNASAの最初の試みを引き受けます。しかし、1年以上前に小惑星Bennuに到着して以来、ミッションチームは予期せぬ課題に取り組んできました。表面が建物サイズの岩で覆われている小惑星でこの偉業を達成する方法です。
これらの危険な岩を道標として使用して、ミッションチームは課題を克服するための新しい精密なナビゲーション方法を開発しました。
How OSIRIS-REx will Steer Itself to Sample an Asteroid
8月下旬、探査機OSIRIS-RExは、最初のサンプル収集の試みのために小惑星Bennuの表面に移動します。これを行うには、Natural Feature Tracking(NFT)と呼ばれるオンボードの画像ソフトウェアを使用します。これは完全に自律的な光学ナビゲーションの形式です。
クレジット:NASAのゴダード宇宙飛行センター/科学視覚化スタジオ
このビデオはパブリックドメインであり、Scientific Visualization Studioからダウンロードできます。
OSIRIS-RExチームはもともと、Touch-And-Go(TAG)サンプル収集イベント中にLIDARシステムを使用してBennuの表面に移動することを計画していました。LIDARはレーダーに似ていますが、距離を測定するために電波ではなくレーザーパルスを使用します。OSIRIS-RExガイダンス、ナビゲーション、コントロール(GNC)LIDARは、探査機を比較的危険のない表面にナビゲートするように設計されています。当初、ミッションは直径50メート)のタッチダウンサイトを想定していましたが、Bennuの最大の安全なエリアははるかに小さくなっています。最大のサイトの幅はわずか16 mであり、想定される安全エリアの約10%です。チームは、潜在的な危険を回避しながら、探査機が非常に小さなサイトを正確にターゲットできるようにするために、より正確なナビゲーション技術が必要であることに気付きました。
この課題に直面して、OSIRIS-RExチームは、Natural Feature Tracking(NFT)と呼ばれる新しいナビゲーション方法に切り替えました。NFTは、LIDARよりも広範なナビゲーション機能を提供し、チームが「ブルズアイTAG」と呼んでいるものを実行するための鍵となります。光学ナビゲーション技術として、探査機に搭載された高解像度の画像カタログの作成が必要です。
今年の初めに、探査機はナイチンゲールとオスプレイに指定されたミッションのプライマリおよびバックアップサンプル収集サイトを偵察し、625 m近くを飛行しました。これらの高架飛行中に、探査機はさまざまな角度と照明条件から画像を収集し、NFT画像カタログを完成させました。チームはこのカタログを使用して、サンプルサイト地域に固有の岩やクレーターを特定し、サンプル収集イベントの前にこの情報を探査機にアップロードします。NFTは、搭載されている画像カタログと降下中に撮影されたリアルタイムのナビゲーション画像を比較することで、探査機を自律的にBennuの表面に誘導します。探査機が地表に降りると、NFTはランドマークに対する探査機の位置に応じて、予測される接触点を更新します。
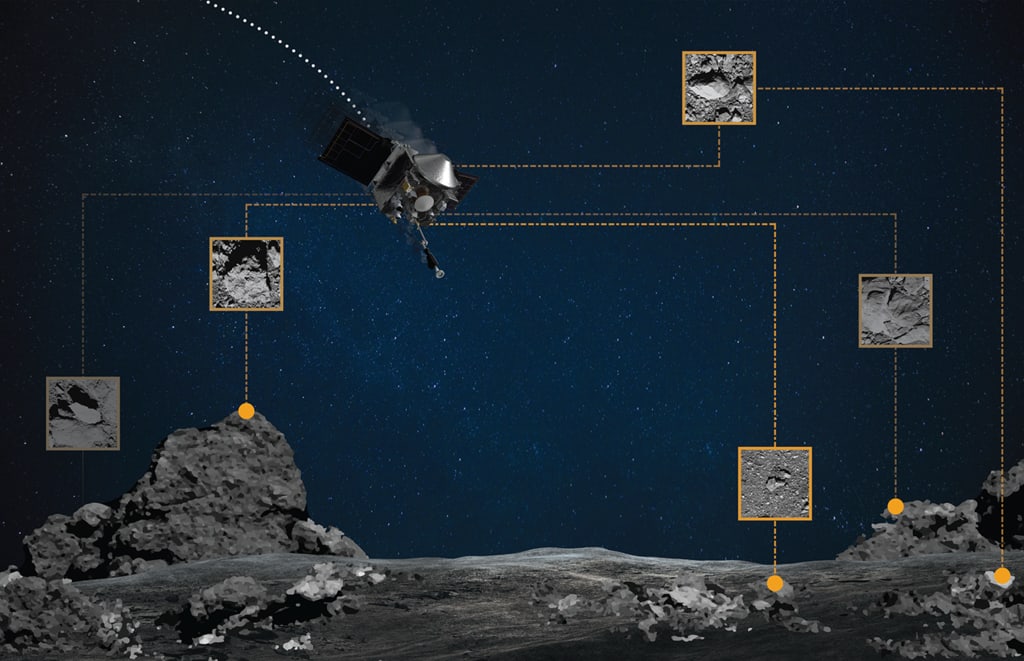
衛星、小惑星、小惑星の岩の写真を示すグラフィック
サンプル収集イベント中に、Natural Feature Tracking(NFT)がNASAの探査機OSIRIS-RExを小惑星Bennuの表面に誘導します。探査機は、小惑星の表面の特徴をリアルタイムで撮影し、それらの画像を搭載画像カタログと比較します。次に、探査機はこれらの地理的マーカーを使用して自分自身の方向を決め、タッチダウンサイトを正確にターゲットにします。
クレジット:NASA / Goddard / University of Arizona
地上では、チームメンバーはナイチンゲールとオスプレイの両方のサイトの「ハザードマップ」を作成し、大きな岩や急な斜面など、宇宙船に損害を与える可能性のある表面の特徴をすべて記録しました。チームは、OSIRIS-RExレーザー高度計(OLA)のデータと組み合わせて画像カタログを使用し、Bennuの地形を厳密にモデル化した3Dマップを作成しました。NFTの一部として、これらのマップはボルダーの高さとクレーターの深さを記録し、非常に小さなサイトをターゲットにしながら探査機を潜在的な危険から遠ざけます。降下中に、探査機が安全でない地形に触れると予測した場合、自律的に波を打ち、表面から離れます。ただし、そのエリアに危険がないことがわかると、下降を続け、サンプルの収集を試みます。
NFTは、4月に最初のサンプル収集リハーサル中に探査機を操縦するために使用されます。運用チームは、2019年後半のオービタルBミッションフェーズで予備テストを実行し、その結果、NFTが設計どおりの実際の状態で機能することが実証されました。NFTは、6月に予定されている2回目のリハーサル中のナビゲーションにも使用されます。
OSIRIS-RExの最初のサンプル収集の試みは8月下旬に予定されています。探査機は2021年にベヌを出発し、2023年9月に地球にサンプルを配達する予定です。
メリーランド州グリーンベルトにあるNASAのゴダード宇宙飛行センターは、OSIRIS-RExの全体的なミッション管理、システムエンジニアリング、および安全性とミッション保証を提供します。ツーソンのアリゾナ大学のダンテ・ローレッタは主任研究員であり、アリゾナ大学は科学チームとミッションの科学観測計画とデータ処理も率いています。デンバーのロッキード・マーティン・スペースが探査機を建設し、飛行操作を提供しました。GoddardとKinetX Aerospaceは、探査機OSIRIS-RExの操縦を担当しています。OSIRIS-RExは、アラバマ州ハンツビルにあるNASAのマーシャル宇宙飛行センターが管理する、ワシントンの科学ミッション局のNASAのニューフロンティアプログラムの3番目のミッションです。
NASAのOSIRIS-RExミッションの詳細については、次をご覧ください。
https://www.nasa.gov/osiris-rex
そして
https://www.asteroidmission.org
最終更新日:2020年3月10日
タグ: OSIRIS-REx(Origins Spectral Interpretation Resource Identification Security Regolith Explorer) 太陽系 小惑星、 ベンヌ、 ゴダード宇宙飛行センター、
Bennuの巨石がNASAのOSIRIS-RExのビーコンとして輝く
この夏、探査機OSIRIS-RExは、小惑星の表面に触れ、そのサンプルを収集し、安全に後退するNASAの最初の試みを引き受けます。しかし、1年以上前に小惑星Bennuに到着して以来、ミッションチームは予期せぬ課題に取り組んできました。表面が建物サイズの岩で覆われている小惑星でこの偉業を達成する方法です。
これらの危険な岩を道標として使用して、ミッションチームは課題を克服するための新しい精密なナビゲーション方法を開発しました。
How OSIRIS-REx will Steer Itself to Sample an Asteroid
8月下旬、探査機OSIRIS-RExは、最初のサンプル収集の試みのために小惑星Bennuの表面に移動します。これを行うには、Natural Feature Tracking(NFT)と呼ばれるオンボードの画像ソフトウェアを使用します。これは完全に自律的な光学ナビゲーションの形式です。
クレジット:NASAのゴダード宇宙飛行センター/科学視覚化スタジオ
このビデオはパブリックドメインであり、Scientific Visualization Studioからダウンロードできます。
OSIRIS-RExチームはもともと、Touch-And-Go(TAG)サンプル収集イベント中にLIDARシステムを使用してBennuの表面に移動することを計画していました。LIDARはレーダーに似ていますが、距離を測定するために電波ではなくレーザーパルスを使用します。OSIRIS-RExガイダンス、ナビゲーション、コントロール(GNC)LIDARは、探査機を比較的危険のない表面にナビゲートするように設計されています。当初、ミッションは直径50メート)のタッチダウンサイトを想定していましたが、Bennuの最大の安全なエリアははるかに小さくなっています。最大のサイトの幅はわずか16 mであり、想定される安全エリアの約10%です。チームは、潜在的な危険を回避しながら、探査機が非常に小さなサイトを正確にターゲットできるようにするために、より正確なナビゲーション技術が必要であることに気付きました。
この課題に直面して、OSIRIS-RExチームは、Natural Feature Tracking(NFT)と呼ばれる新しいナビゲーション方法に切り替えました。NFTは、LIDARよりも広範なナビゲーション機能を提供し、チームが「ブルズアイTAG」と呼んでいるものを実行するための鍵となります。光学ナビゲーション技術として、探査機に搭載された高解像度の画像カタログの作成が必要です。
今年の初めに、探査機はナイチンゲールとオスプレイに指定されたミッションのプライマリおよびバックアップサンプル収集サイトを偵察し、625 m近くを飛行しました。これらの高架飛行中に、探査機はさまざまな角度と照明条件から画像を収集し、NFT画像カタログを完成させました。チームはこのカタログを使用して、サンプルサイト地域に固有の岩やクレーターを特定し、サンプル収集イベントの前にこの情報を探査機にアップロードします。NFTは、搭載されている画像カタログと降下中に撮影されたリアルタイムのナビゲーション画像を比較することで、探査機を自律的にBennuの表面に誘導します。探査機が地表に降りると、NFTはランドマークに対する探査機の位置に応じて、予測される接触点を更新します。
衛星、小惑星、小惑星の岩の写真を示すグラフィック
サンプル収集イベント中に、Natural Feature Tracking(NFT)がNASAの探査機OSIRIS-RExを小惑星Bennuの表面に誘導します。探査機は、小惑星の表面の特徴をリアルタイムで撮影し、それらの画像を搭載画像カタログと比較します。次に、探査機はこれらの地理的マーカーを使用して自分自身の方向を決め、タッチダウンサイトを正確にターゲットにします。
クレジット:NASA / Goddard / University of Arizona
地上では、チームメンバーはナイチンゲールとオスプレイの両方のサイトの「ハザードマップ」を作成し、大きな岩や急な斜面など、宇宙船に損害を与える可能性のある表面の特徴をすべて記録しました。チームは、OSIRIS-RExレーザー高度計(OLA)のデータと組み合わせて画像カタログを使用し、Bennuの地形を厳密にモデル化した3Dマップを作成しました。NFTの一部として、これらのマップはボルダーの高さとクレーターの深さを記録し、非常に小さなサイトをターゲットにしながら探査機を潜在的な危険から遠ざけます。降下中に、探査機が安全でない地形に触れると予測した場合、自律的に波を打ち、表面から離れます。ただし、そのエリアに危険がないことがわかると、下降を続け、サンプルの収集を試みます。
NFTは、4月に最初のサンプル収集リハーサル中に探査機を操縦するために使用されます。運用チームは、2019年後半のオービタルBミッションフェーズで予備テストを実行し、その結果、NFTが設計どおりの実際の状態で機能することが実証されました。NFTは、6月に予定されている2回目のリハーサル中のナビゲーションにも使用されます。
OSIRIS-RExの最初のサンプル収集の試みは8月下旬に予定されています。探査機は2021年にベヌを出発し、2023年9月に地球にサンプルを配達する予定です。
メリーランド州グリーンベルトにあるNASAのゴダード宇宙飛行センターは、OSIRIS-RExの全体的なミッション管理、システムエンジニアリング、および安全性とミッション保証を提供します。ツーソンのアリゾナ大学のダンテ・ローレッタは主任研究員であり、アリゾナ大学は科学チームとミッションの科学観測計画とデータ処理も率いています。デンバーのロッキード・マーティン・スペースが探査機を建設し、飛行操作を提供しました。GoddardとKinetX Aerospaceは、探査機OSIRIS-RExの操縦を担当しています。OSIRIS-RExは、アラバマ州ハンツビルにあるNASAのマーシャル宇宙飛行センターが管理する、ワシントンの科学ミッション局のNASAのニューフロンティアプログラムの3番目のミッションです。
NASAのOSIRIS-RExミッションの詳細については、次をご覧ください。
https://www.nasa.gov/osiris-rex
そして
https://www.asteroidmission.org
最終更新日:2020年3月10日
タグ: OSIRIS-REx(Origins Spectral Interpretation Resource Identification Security Regolith Explorer) 太陽系 小惑星、 ベンヌ、 ゴダード宇宙飛行センター、










※コメント投稿者のブログIDはブログ作成者のみに通知されます