








ESAは船外活動ロボットを開発中。有人探査に本腰だな。
脚が無くて腕ばかりだから、オランウータンみたいなロボットか?まさか、偉い人が物分りの良い組織じゃなかろうな。
日本に微少重力テスト用の水槽はあるのか?ダイビングプールを借りればいいのか!
以下、機械翻訳
Eurobotはザブンと音を立てます。
2007年7月6日
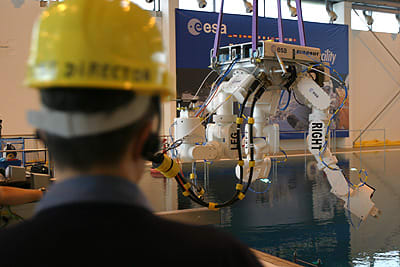
よくある空想科学映画の多くが、知的なロボットの使用人が彼らの主人と並んで働いているのを示します。 ヨーロッパ人の技術者が宇宙で作動できるより精巧なマシンを開発するとき、フィクションは急速に事実になっています。 Eurobotとして知られているこれらの1つは巨大なプールの中でちょうどヨーロッパのAstronaut Centreにトライアルを終了したところです。
2003年以来Eurobotは開発中です、マルチ継ぎ合わせられて、3腕をしたアシスタントが結局現在宇宙飛行士によって引き受けられているより世俗的なタスクのいくつかを扱うという意志で。 また、月か火星への人間の遠征の間、宇宙遊泳として、より一般的に知られている宇宙船外の活動(EVA)の間、宇宙飛行士を助けるのにおいて使用があるのが可能な1つにもかかわらず、ロボットは不可欠な助手であるかもしれません。
スペースの敵対的な状態で、精力的なEurobotは、様々な通常のタスクを引き継ぐことによって、大きな時間と努力を節約するでしょう。 例えば、宇宙飛行士のフレキシブルな友人は、国際宇宙ステーション(ISS)に関する職場に届いて、クローズアップ点検を実行して、道具と設備の転送などの初期のどんな準備工事も行うことができるでしょう。 ISSの中のオペレータによって離れて制御されています、Eurobotはマルチタスクにできるようになるでしょう、追加手と目を宇宙遊泳者に提供して。 宇宙飛行士が安全に駅の中にいったんいると、Eurobotは道具と設備を片づけるでしょう。
「それは最も役に立つ援助であるかもしれません。」と、ジャンフランコVisentin、ESAの自動化とロボット工学部の代表は言いました。 「すべての任務の間の乗組員時間の不足があるので、宇宙飛行士時間の使用を改良する何でも非常に望ましいです。」 元ESA宇宙飛行士クロードNicollier(EVAsとロボット工学の両方の専門家)は共有します。この観点、「EVAsへのサポートは主に仕事場準備や、ポスト-EVAクリーンアップや点検などのタスクで見られます」。
今週の運動に使用されるEurobotのバージョンは'中立浮力設備'での操作のために開発された無重量環境試験(WET)モデルと呼ばれる初期の原型です--宇宙空間での微小重力状態をシミュレートできる水槽。
ESAのためにThales Alenia Spaceによって率いられた共同体によって開発されています、WET モデルは計画された飛行モデルのサイズと構成において同様です。 それは3本の同じ腕と、それぞれ7個のジョイントがある主要な‘ボディー'構造から成ります。 アームの長さと強さは人間のものと同様ですが、それらは、はるかに操縦できて多能です。
さらに、各アームはカメラと手として作動するエンドエフェクタを備えています。 WETモデルには、1つのタイプの手しかありません。(それは、EVA手すりを握ることができます)。 対照的に、本当のEurobotには、3か4本の交換可能な手のセットがあるでしょう。 なべと傾斜メカニズムの上のヘッドカメラは作業現場の全体的な監視眺めを提供します。
最新のトライアルでは、WET モデルは、Eurobotのための操作上の概念について確かめるのに使用されました。 物体を動かして、操作する性能のテストの間、プロジェクト・チームはロボットの能力の実地体験を獲得しました、マルチ軍備管理とコーディネートを十分に試して、あいまいにされた目標の視界と共に。 Eurobotは、相互作用を示すために宇宙飛行士とロボットの間でESA宇宙飛行士ジーン-フランソアClervoyによってEACプールに接合されました。
ケルン(ドイツ)では、ヨーロッパのAstronaut Centre(EAC)のトライアルがEurobot Wet モデルプログラムの初期の検証フェーズを結論づけます、イタリアでの前の予備の乾いてぬれたテストから、次のです。
「テストは順調に進みました。」と、フィリップSchoonejans、ESAのEurobot Projectマネージャは言いました。 「また、Eurobotが本当に宇宙飛行士を助けることができるのはそのEurobotが軌道のステーションの周りを自主的に安全に示される状態で歩くことができます、既存のEVA手すりよりいいえを使用してことだけであるのではなく明確になっています。」 「そして、また、次の段階で私たちは、惑星の表面に関係して使用を示すのを計画しています、Agencyの探検プログラムの一部として。」
Eurobotの操作上の局面を研究するのはWETモデルのテストで可能になりますが、ESAは、技術開発を促進するために包括的なプログラムを引き受けました。
これはロボット・アーム(DexArmと呼ばれる)とツール交換装置(CTED)のエンジニアリングモデルを含んでいます。 Eurobotが物(VIMANCO)を特定して、握るコンピュータビジョン技術。 ロボット・アームの動き(CONTEXT)のコーディネートを許す中央の脳。 DexArm(外骨格)の遠隔操作を許容する洗練されたヒューマンマシンインタフェース。 そして、Eurobot(A-DREAMS)をプログラムして、制御するのに使用される制御局。 これらのすべてがNoordwijk、オランダでESAの宇宙研究と技術センター(ESTEC)に位置するEurobotテストベッドで統合状態です。
クリックありがとうございます。
人気blogランキングへ
自然科学90%猫10%で登録したので、猫に飛ぶ時もあります。
脚が無くて腕ばかりだから、オランウータンみたいなロボットか?まさか、偉い人が物分りの良い組織じゃなかろうな。
日本に微少重力テスト用の水槽はあるのか?ダイビングプールを借りればいいのか!
以下、機械翻訳
Eurobotはザブンと音を立てます。
2007年7月6日
よくある空想科学映画の多くが、知的なロボットの使用人が彼らの主人と並んで働いているのを示します。 ヨーロッパ人の技術者が宇宙で作動できるより精巧なマシンを開発するとき、フィクションは急速に事実になっています。 Eurobotとして知られているこれらの1つは巨大なプールの中でちょうどヨーロッパのAstronaut Centreにトライアルを終了したところです。
2003年以来Eurobotは開発中です、マルチ継ぎ合わせられて、3腕をしたアシスタントが結局現在宇宙飛行士によって引き受けられているより世俗的なタスクのいくつかを扱うという意志で。 また、月か火星への人間の遠征の間、宇宙遊泳として、より一般的に知られている宇宙船外の活動(EVA)の間、宇宙飛行士を助けるのにおいて使用があるのが可能な1つにもかかわらず、ロボットは不可欠な助手であるかもしれません。
スペースの敵対的な状態で、精力的なEurobotは、様々な通常のタスクを引き継ぐことによって、大きな時間と努力を節約するでしょう。 例えば、宇宙飛行士のフレキシブルな友人は、国際宇宙ステーション(ISS)に関する職場に届いて、クローズアップ点検を実行して、道具と設備の転送などの初期のどんな準備工事も行うことができるでしょう。 ISSの中のオペレータによって離れて制御されています、Eurobotはマルチタスクにできるようになるでしょう、追加手と目を宇宙遊泳者に提供して。 宇宙飛行士が安全に駅の中にいったんいると、Eurobotは道具と設備を片づけるでしょう。
「それは最も役に立つ援助であるかもしれません。」と、ジャンフランコVisentin、ESAの自動化とロボット工学部の代表は言いました。 「すべての任務の間の乗組員時間の不足があるので、宇宙飛行士時間の使用を改良する何でも非常に望ましいです。」 元ESA宇宙飛行士クロードNicollier(EVAsとロボット工学の両方の専門家)は共有します。この観点、「EVAsへのサポートは主に仕事場準備や、ポスト-EVAクリーンアップや点検などのタスクで見られます」。
今週の運動に使用されるEurobotのバージョンは'中立浮力設備'での操作のために開発された無重量環境試験(WET)モデルと呼ばれる初期の原型です--宇宙空間での微小重力状態をシミュレートできる水槽。
ESAのためにThales Alenia Spaceによって率いられた共同体によって開発されています、WET モデルは計画された飛行モデルのサイズと構成において同様です。 それは3本の同じ腕と、それぞれ7個のジョイントがある主要な‘ボディー'構造から成ります。 アームの長さと強さは人間のものと同様ですが、それらは、はるかに操縦できて多能です。
さらに、各アームはカメラと手として作動するエンドエフェクタを備えています。 WETモデルには、1つのタイプの手しかありません。(それは、EVA手すりを握ることができます)。 対照的に、本当のEurobotには、3か4本の交換可能な手のセットがあるでしょう。 なべと傾斜メカニズムの上のヘッドカメラは作業現場の全体的な監視眺めを提供します。
最新のトライアルでは、WET モデルは、Eurobotのための操作上の概念について確かめるのに使用されました。 物体を動かして、操作する性能のテストの間、プロジェクト・チームはロボットの能力の実地体験を獲得しました、マルチ軍備管理とコーディネートを十分に試して、あいまいにされた目標の視界と共に。 Eurobotは、相互作用を示すために宇宙飛行士とロボットの間でESA宇宙飛行士ジーン-フランソアClervoyによってEACプールに接合されました。
ケルン(ドイツ)では、ヨーロッパのAstronaut Centre(EAC)のトライアルがEurobot Wet モデルプログラムの初期の検証フェーズを結論づけます、イタリアでの前の予備の乾いてぬれたテストから、次のです。
「テストは順調に進みました。」と、フィリップSchoonejans、ESAのEurobot Projectマネージャは言いました。 「また、Eurobotが本当に宇宙飛行士を助けることができるのはそのEurobotが軌道のステーションの周りを自主的に安全に示される状態で歩くことができます、既存のEVA手すりよりいいえを使用してことだけであるのではなく明確になっています。」 「そして、また、次の段階で私たちは、惑星の表面に関係して使用を示すのを計画しています、Agencyの探検プログラムの一部として。」
Eurobotの操作上の局面を研究するのはWETモデルのテストで可能になりますが、ESAは、技術開発を促進するために包括的なプログラムを引き受けました。
これはロボット・アーム(DexArmと呼ばれる)とツール交換装置(CTED)のエンジニアリングモデルを含んでいます。 Eurobotが物(VIMANCO)を特定して、握るコンピュータビジョン技術。 ロボット・アームの動き(CONTEXT)のコーディネートを許す中央の脳。 DexArm(外骨格)の遠隔操作を許容する洗練されたヒューマンマシンインタフェース。 そして、Eurobot(A-DREAMS)をプログラムして、制御するのに使用される制御局。 これらのすべてがNoordwijk、オランダでESAの宇宙研究と技術センター(ESTEC)に位置するEurobotテストベッドで統合状態です。
クリックありがとうございます。
人気blogランキングへ
自然科学90%猫10%で登録したので、猫に飛ぶ時もあります。










※コメント投稿者のブログIDはブログ作成者のみに通知されます