








木星のトロヤ群を観測する探査機ルーシーが近くを通過するので小惑星ディンキネシュを見たら接触連衛星を持っていた。ディンキネシュの平均密度が2400±350kg/m^3とラブルパイル構造より高密度ではあるものの自転周期が3.7387±0.0013時間とYORP効果で速められているのは明らか。
表面の礫類が赤道に移動、遠心力が重力より勝ると分離してリングに成りロシュ限界を超えて離れたら纏まって衛星の出来上がり。以下、機械翻訳。
小惑星(152830)ディンキネシュの接触連星衛星
直径が約5km未満の小惑星は、放射トルク(YORP、Yarkovsky–O'Keefe–Radzievskii–Paddack効果)に対して十分に小さいため、複雑な歴史を持っています[Bottke等、2006]彼らの進化の注目すべき要因であること[Margot等、2015].(152830) ディンキネシュは、太陽中心の長半径2.19AUで、主小惑星帯の内縁付近で太陽の周りを公転する小さな小惑星である。そのS型スペクトル[Bolin等、2023; de León等、2023]は、メインベルトのこの部分のボディに典型的です[デメオ&キャリー、2013].ここでは、探査機「ルーシー」による観測結果を報告します[Levison等、2021; Olkin等、2021]ディンキネシュから431km以内を通過したからです。ルーシーはディンキネシュを明らかにしたが、これは有効直径が∼720m、意外と複雑です。特に注目すべきは、赤道直下の海嶺に覆われた顕著な縦方向のトラフの存在と、現在(152830)セラムと名付けられている最初の接触連星衛星の発見である。セラムは、直径が∼210m と∼230m.ディンキネシュの公転周期は約52.7時間で、距離3.1kmで、潮汐ロックされている。この系の力学的状態、角運動量、地形学的観測から、ディンキネシュの海嶺とトラフは、おそらくYORPによるスピンアップとそれに続く脱落物質の部分的な再降着による質量破壊の結果であると推測される。セラムは恐らく、この出来事によって流された物質から降着したのだろう。
ディンキネシュはルーシーのミッションに後から加わったもので、主にルーシーの作戦の重要な要素である自律的な測距・追跡システムの飛行中テストを目的として いた[Olkin等。、 2021].フライバイの形状は、ミッションの後半で遭遇するトロヤ群のターゲットの形状を忠実に模倣していたため、魅力的なターゲットでした[Levison等。、 2021]です。 ルーシーは太陽の位相角120°でディンキネシュに接近し、接近すると位相は急速に低下し、ほぼゼロを通過し、その後60のアウトバウンド位相に増加した∘です。ルーシーとディンキネシュの相対速度は秒速4.5kmであった。最接近時、ルーシーは ディンキネシュから430.629±0.045kmで、ルーシー-ディンキネシュ-太陽の角度は30°でした.
高解像度画像のサンプルを図1に示す。1.ディンキネシュの基本的な形状は、地球近傍小惑星(NEA)の集団に見られる「上」の形状を彷彿とさせます(例えば、モシャップ [Ostro等。、 2006]、ベンヌ[Barnouin等。、 2019]リュウグウ[渡邊 et al.、 2019]、そして程度は低いが、ディディモス[Palmer等。、 2023; Campo Bagatin et al. (カンポ・バガティン他)、 2023]).ディンキネシュも同じような大きさです。以下で詳しく説明するように、ディンキネシュの有効直径は719 mですが、ベンヌ、リュウグウ、ディディモスの有効直径は∼560 m と∼900メートルその間です。
これらの天体と同様に、ディンキネシュ島は顕著な赤道海嶺によって支配されています。ディンキネシュには、尾根にほぼ垂直に走る大きなトラフもあります。リュウグウとディディモスはどちらも似たような機能を持っていますが[杉田他、 2019; Barnouin等。、 2024年、投稿済み]、ディンキネシュのトラフはより実質的であるように見えます。尾根は谷に重なり、2つの構造のうち若い方であることを示しています。しかし、その絶対的な年齢に関する情報はなく、同じ出来事で形成された可能性がある。
遭遇を通して得られた高解像度の画像(方法/観察のセクションを参照)により、各コンポーネントの形状モデルを再構築することができます。ディンキネシュとセラムのサイズが小さいため、接近遭遇の前後数分間しか有用な分解能イメージングが可能ではありませんでした。ディンキネシュの自転が観測されたが、自転によって明らかになった追加の地形の量は少なかった(∼10%)を本体の照らされていない部分と比較します。セラムの自転運動や軌道運動は見られなかった。セラムから見たディンキネシュの反太陽半球の照らしは、観測するにはあまりにも微弱だった。したがって、画像では各体の1つの半球しか見えません。ただし、観測されていない半球の制約は、両方の地面からの測光によって提供できます[Mottola等。、 2023] そしてルーシーは、遠すぎてターゲットを解決できませんでした。したがって、システムの形状と構造についてさらに議論する前に、この測光の分析に注意を向けます。
遭遇後の光度曲線測光キャンペーンからの未解決のデータ(方法/観測のセクションを参照)を図1に示します。 2.これらのデータから、セラムの回転の光度曲線への寄与は T = 52.44 ±0.14時間で周期性を持つことを決定する
、地上観測から判明した52.67時間±0.04時間周期[Mottola等。、 2023]に匹敵
です。地上での周期である52.67時間を採用しているのは、サンプリングベースラインが長いため、より正確だからです。また、遭遇後の光度曲線は、ディンキネシュとセラムの52時間周期の相互日食によるものと推測されるディップも示しています(図1)。 2、および方法/観測のセクション)は、セラムの公転周期が自転周期と非常によく似ていることを示しています。これは、システムが潮汐ロックされていることを意味すると解釈します。の形式主義を使用して、 [Jacobson & Scheeres, ジェイコブソン&シェールズ2011年Aの]では、潮汐効果がセラムの長軸をディンキネシュに対して放射状に整列させる時間スケールは、次数で短くなると推定される
10
5
現在の分離では、いくつかの重要な放射線の影響があるため、それらの形式は正確ではない可能性がありますが、[Bottke等。、 2006]考慮されませんでした[ポウ&ニモ、 2024]です。また、ディンキネシュの中心とセラムの2つのローブは、1本の線に沿って横たわっているように見えることもわかった(図1)。1m) — 潮汐ロックシステムと一致します。したがって、セラムは同期自転しており、ディンキネシュを52.67時間の周期で公転していると結論付けた。遭遇後の光度曲線における相互事象のタイミング(図1)。 2)は、フライバイ中のセラムの軌道位置を基準に、セラムの軌道がディンキネシュの地動説軌道に対して逆行していることを示している。
一次ディンキネシュはより速く回転し、光度曲線に最も適合するとスピン周期はP = 3.7387±0.0013時間になります
フライバイ中の地物追跡は、自転が黄道の北に対して逆行していること、すなわちセラムの軌道と同じ意味であることを示している。全体的なスピン状態(同期する二次小惑星と高速回転する一次小惑星)により、ディンキネシュは、衛星が近接している地球近傍小惑星やメインベルト小惑星の大部分と類似している[Pravec et al.、 2016].
ここで、ディンキネシュとセラムの形の話に戻ります。「方法/形状」の項で説明したプロセスによって、ルーシーの軌道の予備的な再構成に基づいて作成されたディンキネシュのモデルを図1に示す。 3.体積等価球の直径はこの形状モデルに基づくディンキネシュの場合は719±24mであることがわかります 。セラムは2つの異なる葉から成り立っているように見える。しかし、接触点は遭遇時に影になっていたため、首の正確な性質は不明です。接近時に撮影された画像で、外側のローブが内側のローブよりも探査機から遠く離れている状態です(図1参照)。 1h例)は、首が ∼67%インナーローブの直径の。212±21m の等価球形直径が見つかります
および234±23 m は、楕円を四肢のプロファイルに近づけることに基づく Selam の内側と外側のローブです。ローブが互いの周りを軌道上にある場合、それらの周期は次のようになります。
∼4
これは、上記のライトカーブの観測値と矛盾します。さらに、その期間が短ければ、動きを検出したでしょう。したがって、ローブは互いに重なり合っている必要があり、セラムは接触連星である可能性が高い。
アウトバウンド画像は、セラムの両葉をはっきりと示しています(図1)。1m)は、三角測量によって決定されるように、それらの間のベクトルにほぼ垂直な方向から。これらの画像から、ディンキネシュとセラムの間の図の中心の分離の予備的な推定値は、
3.11±0.05km
フライバイ時の。Methods/Mass&Densityの節で、Selamは円軌道上にあると主張する。もしそうなら、この分離は相互軌道の長半径を表す。
ディンキネシュとセラムの空間における向きは、現在のデータで推定することができる。特にディンキネシュの場合、遭遇中に観察された少量の回転と、その形状モデルの短軸の方向は、その傾斜を示唆しています
∼178.7±0.5∘(つまり、その回転軸は∼1∘その軌道面に垂直であることから)。衛星の場合、遭遇後のルーシー観測で観測された相互日食と、2022年から2023年の地上の光度曲線[6]から推測される相互事象は、その軌道面がディンキネシュの地動説軌道面に近いことを示唆しています。したがって、ディンキネシュの地動説軌道、セラムの軌道、ディンキネシュの赤道面の3つすべてが互いに近接している可能性があります。この配置は、小さな連星小惑星にほぼ遍在しています[マーゴット等、 2002]YORP効果による非対称熱輻射力によるスピンポールの配向転向の結果[Bottke等。、 2006].YORP タイムスケールが∼10^7yr は、ディンキネシュのスピン極がゼロまたは 180°に近づくことを示します。 [Pravec et al.、 2012; スタットラー、 2015].
また、セラムの内葉は隆起した構造をしています(図1)。 1h-k)です。セラムの両葉は平らなファセットとブロック状で角張った全体的な形状を持ち、見かけの隆起はそのような2つのファセットの境界である可能性があります。しかし、もしこの構造がディンキネシュを中心とする円盤からの物質の降着によって形成されたとすれば、予想通り、もともとは軌道面とディンキネシュの海嶺の両方に整列していたはずである。その場合、セラムの隆起は接触連星の形成中にずれた可能性が高いが、これは、1)セラムが現在その長軸の周りを回転または臆走しているか、または2)接触前に形成された隆起のいずれかであることを示唆している。セラムの観察された構造は、少なくとも部分的には瓦礫の山であることを示唆しています。しかし、セラムの角張った連星の形状は、内部強度が顕著であることを示唆しており、ディディモスの衛星であるディモルフォスの扁平な回転楕円体の形状とは大きく異なっている[Daly等。、 2023]サブkmの小惑星(これもS型)の他の唯一の衛星で、詳細な画像があります。
ディンキネシュの鉱物学とかさ密度は、その構造に制約を与えます。ディンキネシュのかさ密度は
2400±350kg/m^3(Methods/Mass&Densityセクション)は、通常のコンドライト鉱物学を持つオブジェクトの期待値の範囲にあります。L-コンドライト隕石の嵩密度は、通常のコンドライトの範囲の優れた類似物です。[Scheeres等。、 2015]S型小惑星の鉱物学的期待値、平均3360±160kg/m 37.5%の微小気孔率を使って[マッケ、 2010].方法/質量と密度のセクションで説明したディンキネシュのかさ密度の不確実性を考えると、これは
25±10%.そのかさ密度は、この鉱物学のS型NEAと同族であり、このサイズ範囲にあります。たとえば、Didymos の密度は
2800±280kg/m3 [Barnouin等。、 2024年、投稿済み]、イトカワのかさ密度は1900±130kg/m3 [藤原ら、 2006]レーダーで観測された連星Moshupは、
1970±240kg/m3 [Ostro等。、 2006].低密度の天体は、ディディモスよりもはるかに多孔質で、より顕著な瓦礫の山構造をしており、ディンキネシュはその中間に位置している。ディンキネシュとディディモスは、おそらく、天体のかなりの部分が比較的首尾一貫している連続体の一部にある。
Dinkinesh がシステムのボリュームの 94% を占め、Selam が 6% を占めています。すべての成分の密度が等しいと仮定すると、ディンキネシュとセラムの成分質量はM𝐷 = 4.67×10^11と M𝑆 = 0.28×10^11kgです。これらの成分質量を使用して、重心がディンキネシュの重心からS𝑏ar𝑦 = 176m距離だけSelamの方向にずれていると計算できます。プライマリの本体内部に深くあります。
図1は、ディンキネシュが過去に世界的な構造的破綻に見舞われたことを強く示唆している。その規模の大きさから、この事象はYORP効果によるスピンアップの結果である可能性が高い [平林 et al.、 2015; Bottke等。、 2006]については、図1の説明を参照してください。 4キャプション。true の場合、ディンキネシュ系の角運動量は、スピン障壁限界付近で回転する母体の総角運動量に匹敵するはずです [Pravec & Harris、 2007]です。実際、ディンキネシュ系には、回転分裂に必要な角運動量の88%が含まれていることがわかった(cf. Methods/AngularMomentumの節を参照)、ディンキネシュの構造は角運動量が大きいために失敗したという考えと一致している。
ディンキネシュは、地球近傍とメインベルトの両小惑星と多くの特徴を共有しており、近距離で研究された唯一のサブkmサイズのメインベルト天体である。小さな小惑星の約15%が連星であることが観測されています[マーゴット等、 2002; Pravec et al.、 2006].十分に特徴付けられているこれらの系のサブセットの場合、支配的なパターンは、半長軸を持つほぼ円形の軌道に同期二次を持つ系です。
ある
の ≈ 3またはそれ以上の一次半径、r𝑝𝑟i𝑚 [Pravec et al.、 2006].セラムの半長軸a/𝑟𝑝𝑟i𝑚 ≈ 9は、同程度のサイズで、より近くにクラスター化する、十分に特徴付けられた他のシステムの大部分と比較して幅が広いです。
a/𝑟𝑝𝑟i𝑚 ≈ 3 [Monteiro et al. (モンテイロ他)、 2023].ディンキネシュのスピン周期も、≈ 2.5 NEAバイナリ母集団で通常観察されるhr期間[Pravec et al.、 2006].考えられるシナリオの1つは、セラムはもともとディンキネシュの近くで形成され、その後、潮汐相互作用や連星YORPによってより大きな長半径に進化し、ディンキネシュの自転も遅くしたというものです[Jacobson & Scheeres, ジェイコブソン&シェールズ2011bの].
ディンキネシュ・セラム系の最も特徴的な特徴は、セラムの接触二元構造である。無花果。図4は、その形成のための3つの可能なシナリオを示している。セラムの連星的な性質は、どのように形成されたかにかかわらず、これらの衛星システムの形成に重要な制約を課します。第一に、2つのローブの直径がほぼ同じであるという事実は、セラムの原因となった衛星形成過程が、特定の大きさの物体を造るのに有利であることを示している。私たちが知る限り、文献のどの形成モデルもこの要件を満たすことが示されていません。第二に、上で説明したように、2つのローブは別個の体です。したがって、2つのローブを一緒にするプロセスは、ローブが生き残るのに十分な速度で行ったに違いありません。
ディンキネシュ星系の予想外の複雑さは、メインベルトの小さな小惑星がこれまで考えられていたよりも複雑であることを強く示唆している。より大きな天体の周りの軌道上で接触連星が形成されるという事実は、イトカワのような小さな二葉天体の形成に新たな様式があることを示唆している[藤原ら、 2006]そのため、かつてはディンキネシュのようなシステムの構成要素であった可能性があり、その後、束縛が解かれました。
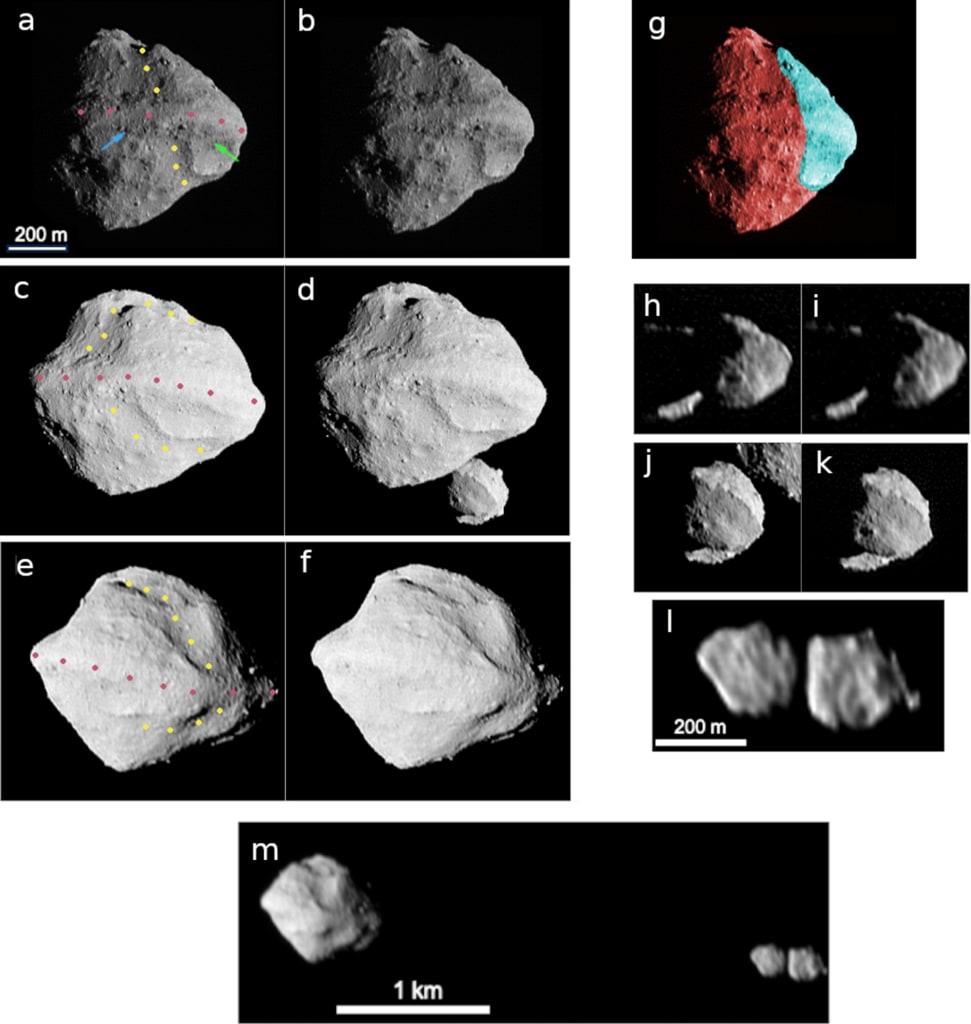
図 1. ルーシーの接近撮影キャンペーンで得られたディンキネシュとセラムの画像。
a–f) 接近時、近距離接近時、離陸時にそれぞれ撮影された画像の交差視ステレオ バージョン (撮影キャンペーンの説明については、「方法/観察」セクションを参照)。ディンキネシュには、2 つの主要な地質学的特徴があります。縦方向の谷と赤道の尾根です (それぞれ黄色とバラ色の点)。図 1a の 2 つの色付き矢印 (緑と青) は、図 3 で説明した 2 つの基準経度で目視により決定された尾根の北の境界を示しています。g) 谷を取り除いたディンキネシュのシミュレーション画像。これは、図 1a の修正バージョンで、シアンの領域が画像内で左下 (水平から 26 度) に 79 m 移動され、時計回りに 7 度回転されています。この再構成画像の色の遷移付近でディンキネシュの縁の輪郭が滑らかであるという事実から、谷は構造的欠陥によってシアン領域が体の残りの部分から離れた結果であると推測されます。h~k) それぞれ接近時および接近間近で撮影されたセラムのステレオ画像ペア。l) 離陸時に撮影されたセラムの単一画像。接近後 10 秒から 5.5 分までセラムは L'LORRI の視野外にあったため、ステレオ画像は不可能です。セラムの画像により、その複雑な形状を 3 軸楕円体として大まかに近似することで、葉の大きさを視覚的に推定できます。ディンキネシュ ベクトル、軌道方向、および自転極に平行な方向における内側ローブと外側ローブの長軸の長さは、それぞれおよそ 240 × 200 × 200 m と 280 × 220 × 210 m であることがわかりました。
m) システム全体の出発画像。また、図 1m を除くすべての画像はデコンボリューションされています。図 1l と m は同じ画像なので、比較するとデコンボリューションの効果を示しています。黄道の北はすべてのフレームでほぼ上になっていますが、ディンキネシュの本体の北は逆行自転しているため下になっています。画像の詳細は次のとおりです。接近に対する時間 (分単位): a: -1.04、b: -1.29、c: +0.21、b: -0.04、e: +2.21、f:
+1.71、h: -2.29、i: -3.29。 j: -0.29、k: -0.54、l & m: +5.46。元のピクセルスケール、m/ピクセル: a: 2.53、b: 2.72、c:
2.14、d: 2.12、e: 3.63、f: 3.11、h: 3.70、i: 4.85、j: 2.16、k: 2.24、l & m: 7.56。太陽位相角、度: a:
62.1、b: 68.0、c: 21.5、d: 30.5、e: 25.0、f: 17.8、h: 84.2、i: 93.3、j: 39.3、k: 47.7、l & m: 44.5。
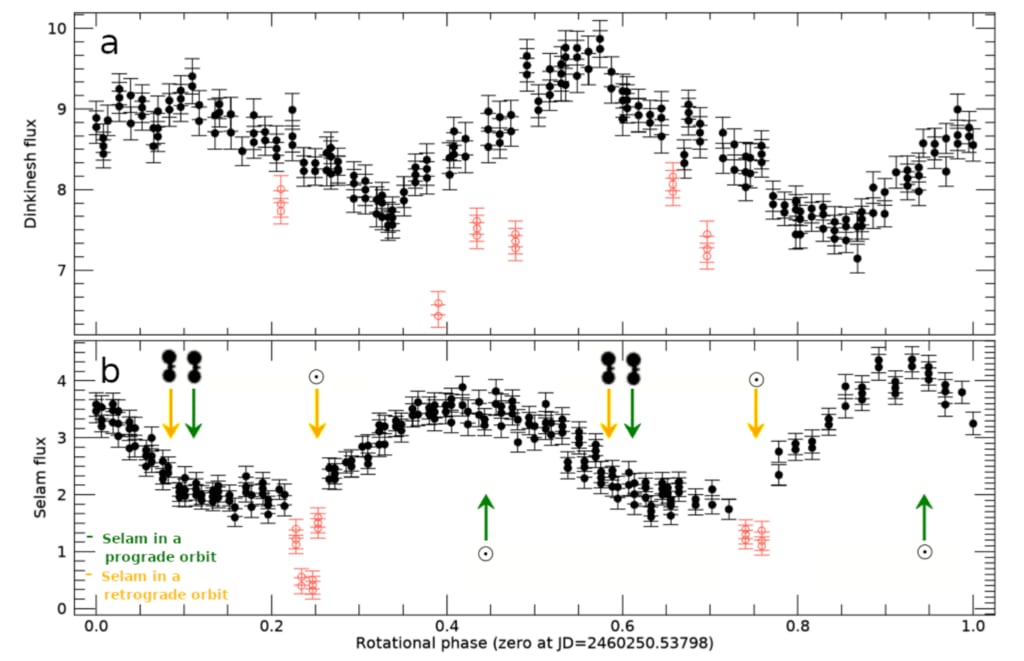
図 2. ディンキネシュとセラムの位相光度曲線。a) 3.7387 時間の周期で折り畳まれたディンキネシュの位相光度曲線。b) 52.67 時間の周期で折り畳まれたセラムの位相光度曲線。これらの周期は、方法/光度曲線分析セクションで開発されたように、アウトバウンド光度測定から決定されました。生の光度測定は、拡張データ図 1 に示されています。黒の実線点は、周期を導出するために使用されました。ディンキネシュの光度曲線は、セラムの光度曲線よりも複雑です。実際、セラムの光度曲線は、この位相角 (60◦) で端から見た 2 つの回転する球体からなる接触連星に予想されるものを彷彿とさせます [Lacerda 2008]。中空の赤い点は除外されており、相互イベントに対応しています。矢印は、異なるタイプのイベントが予測される時期を示しています。ルーシー宇宙船のシンボル でマークされたイベントは、掩蔽(宇宙船の視点から、一方の物体がもう一方の物体の前を通過すること)が発生した場合に発生します。太陽のシンボル ⊙ でマークされたイベントは、日食(一方の物体の影がもう一方の物体に落ちること)が発生する可能性のある時間を示します。観測された相互イベントは日食に関連しています。掩蔽は出発時にルーシーによって観測されませんが、これはルーシーの軌道がディンキネシュの軌道面に対してわずかに傾いているという事実と一致しています。緑の矢印は、セラムがディンキネシュの周りを順行軌道で回っている場合に発生するイベントを示し、オレンジ色の矢印は逆行軌道で発生します。このことから、セラムの軌道は逆行であると結論付けることができます。

図 3. ディンキネシュの形状モデル。赤道山脈の構造を強調するために設計された 3 つの方向 (挿入図) と地形の切断。方法/形状のセクションで説明されているこのモデルは、2 つの領域で構成されています。遭遇時にルーシーに面していたモデルの側面は、接近撮影キャンペーン中に撮影された画像に基づいています (方法/観察のセクションを参照)。ディンキネシュの照らされていない部分は、超楕円体で推定されています。これらの図では、回転 (z) 軸は上を向いています。オレンジ色の曲線は、山脈に沿った緯度方向の切断を示しています。青色と緑色の曲線は、それぞれ赤道山脈の最低標高と最高標高に対応する経度方向の切断です。X1 と X2 のラベルが付いた点は、それぞれ緑色と青色の曲線がオレンジ色の曲線と交差する場所を示しています。大きな点は、図 1a で視覚的に判断できる尾根の北の境界の位置 (対応する青と緑の矢印) を示し、水平の破線は尾根の範囲を示します。尾根は、最低地点で幅 150 m、高さ 40 m で、最高地点では幅 230 m、高さ 100 m です。曲線は、形状モデルが信頼できる場所では実線で、それ以外の場所では点線で示されています。A1、A2、A3、B1、B2、B3、X1、X2 というラベルの付いた参照位置は、読者が形状モデルを曲線に関連付けることができるように含まれています。
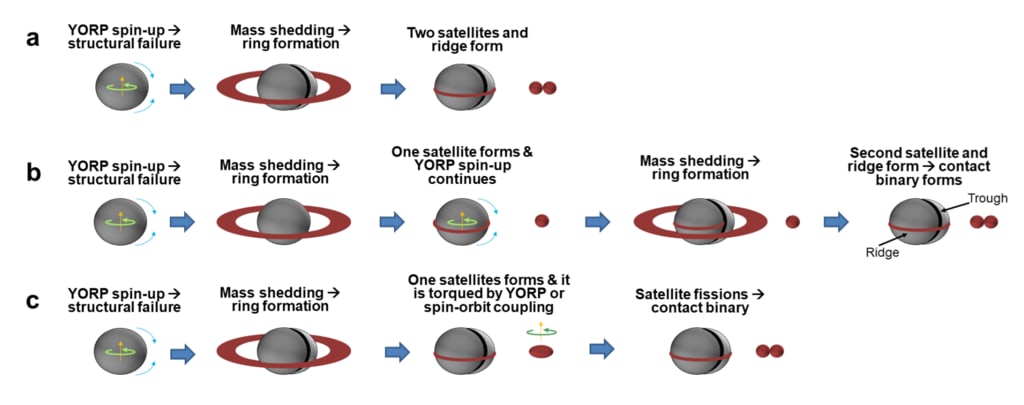
図 4. ディンキネシュ-セラム システムの現在の構成に至る一連の出来事を簡略化した図解。直径が ≈ 10 km 未満の小惑星は、YORP 効果によってスピンアップする傾向がある [Bottke 他 2006]。主小惑星の急速なスピンとそれに伴う遠心力は、最終的に構造破壊を引き起こし、突然の質量放出につながる [Hirabayashi 他 2015]。このイベントは、天体の一部の質量移動 (図 1g) によって、ディンキネシュに見られる谷 (図 1a–f) も生成した可能性がある。放出された物質はリングを形成し、一部の物質は合体して衛星になり、より近い物質は最終的に赤道の表面に落下して尾根を形成する [Hyodo & Sugiura 2022]。接触連星の形成は、2つの衛星が合体した結果である可能性があります。衛星は、a) 単一の質量放出イベント、またはb) 2つの別々のイベントで形成されました [Madeira & Charnoz 2024]。c)
別のシナリオでは、セラムは単一の天体として形成され、その後、自転軌道結合により分裂しました [Jacobson & Scheeres 2011a; Jacobson et al. 2016]。セラムの一部またはすべてが主星への衝突から形成された可能性もあります [Michel et al. 2020]が、谷と尾根はそのようなイベントを生き延びなかったでしょう。したがって、このメカニズムでは、YORPによるディンキネシュのスピンアップと、谷と重ねられた赤道尾根を形成するための質量放出が、その後必要になります。
観察:
ここで紹介する分析は、ルーシーの長距離偵察用画像装置 (以下、L’LORRI) で撮影されたパンクロマティック (350 - 850 nm) 画像に基づいています。L’LORRI は、1024 × 1024 ピクセルの CCD 焦点面に信号を送る 20.8 cm、f/13 の望遠鏡です [Weaver
et al. 2023]。L’LORRI の視野は 0.29◦、ピクセル サイズは 5 µrad です。
L’LORRI は、主に遭遇時の 3 つの異なる観測キャンペーンで使用されました。1) 光学航法再構成画像は、ルーシーの軌道を正確に特定するために設計されました。遭遇の ±4 日間 (tCA = –4 から +4 日) は毎日、tCA = –2 時間から +2 時間までは 15 分ごとに撮影されました。 2) 高解像度の接近画像。tCA= -10 分から +9 分まで 15 秒ごとに撮影され、その後 +55 分まで 1 分間隔で撮影されました。3) 遭遇後の光度曲線測光は、tCA= +4 時間から +95 時間まで取得されました。3 回の露出は 1 時間間隔で撮影されました。この時点では、DinkineshSelam システムは未解決でした。データ量を最小限に抑えるため、これらのデータは L'LORRI のいわゆる 4×4 モードで撮影されました。このモードでは、CCD の読み出し中に 4×4 ピクセルごとにデータがまとめられます。
光度曲線分析:
Selam の軌道周期と Dinkinesh の自転周期は、上記の方法/観測セクションで説明した遭遇後の光度曲線測光法を使用して決定できます。システムの機器等級は、半径 1.5 ピクセルの絞りを使用して画像から抽出されました。小さな絞りは、近くの星からの混入を排除する役割を果たしました。抽出による正式な誤差は、フィッティング結果の最終的な不確実性を決定する前に、縮小された χ^2を 1 に調整するために、係数 1.545 で上方にスケーリングされました。分析された画像は 267 枚でした。
データは、変化する距離に対して補正され、位相係数 0.06 mag/deg を使用して一定の太陽位相角に修正されました。位相角は、開始時の 60.52◦ から終了時の 59.67◦ まで変化しました。観測方向は 3.5 日間でほとんど変化せず、これらの補正によりこれらのわずかな変化が除去され、システムの全体的な測光特性の記録のみが残ります。結果として得られた光度曲線は、相対フラックス単位で拡張データ図 1 に示されています。
光度曲線は、ディンキネシュとセラムからの全フラックスへの寄与を分離するように設計された反復プロセスで分析されました。最初のステップとして、光度曲線のフーリエ級数展開と各オブジェクトの周期を組み合わせたモデルが構築されました。回転位相の基準時間は、両方のオブジェクトの最初のデータ ポイントの時間に任意に設定されました。ディンキネシュの平均フラックスは、モデル内の自由パラメーターでした。さらに、セラム/ディンキネシュの平均フラックス比を反復的に変更しました。この比率は、2 つのオブジェクトの可視領域の比率が 0.25 であることを示す、接近解像画像 (たとえば、図 1d) によって制約されます。 2 つの天体の表面輝度も類似しており、未分解フラックス比も 0.25 です。セラムは真横から観測されるため、この比は両方の天体で最小光量であると想定されました。光度曲線を分離した後、最小フラックスから平均フラックスに補正するための反復補正が適用され、最終的な平均フラックス比は 0.33 (1.3 の等級差に相当) に設定されました。
モデル パラメータは、一連の反復ステップで決定されました。最初のパス フィットでは、ディンキネシュの適切な平均フラックスが設定され、フーリエ項は無効になりました。
この時点で、セラムのみがデータに適合するように自由に調整できました。データは周期的にスキャンされました。各ステップで、最も適合するフーリエ級数が計算され、χ 2 が記録されました。最小の χ 2 周期では、セラムの予備値は 51.76 時間でした。このモデルは光度曲線データから減算され、同様のスキャンが Dinkinesh のみのデータに対して実行されました。Dinkinesh スキャンは、約 3.7 時間と約 4.3 時間の周期で χ 2 の 2 つの興味深い最小値を返しました。すべての周期は、光度曲線が二重ピークであると仮定していることに注意してください。2 つの予備周期が与えられた後、データは 2 つのオブジェクトからの完全なモデルに適合され、すべての自由パラメータはアメーバ χ 2 最小化 [Press ら 1992、第 10.4 章] と同時に最適化されました。アメーバ適合を出発点として不確実性に対する事後補正を行い、2 回目のマルコフ連鎖モンテカルロ適合 [Foreman-Mackey ら 2013 参照] をモデルに対して実行しました。不当に大きい残差のために除外されたデータ ポイントは 18 個ありました (以下の説明を参照)。最終的にフィッティングされた光度曲線は、セラムの振幅が 0.82 等級、ディンキネシュの振幅が 0.25 等級であることを示しています。
このフィッティングからセラムの自転周期は 52.44 ± 0.14 時間であると決定されましたが、相互イベントの存在によって示されるように、潮汐ロックされている可能性が高いため、ディンキネシュの周りの軌道周期にも起因します。結果として得られた位相光度曲線を図 2 に示します。
2 つのオブジェクトのフラックスの変化は偶然にもほぼ同じです。ディンキネシュの方がはるかに大きいため、フラックスの相対的な変化は小さいことを意味します。
セラムの光度曲線は、わずかに非対称な最大値とわずかに広がった最小値を捉える 2 つのフーリエ項によってよくフィッティングされます。ディンキネシュの光度曲線は、極小値と最大値の両方が非対称でかなり複雑ですが、明らかに高次の変化も見られます。この場合、4 項フーリエ近似が必要でしたが、それでも曲線の詳細をすべて完全に捉えることはできません。
たとえば、極小点の 1 つは、4 項近似で追跡できる範囲よりもシャープです。
ディンキネシュの自転周期は 3.7387 ± 0.0013 時間であると判定されました (前述の 4.3 時間はエイリアスであると判定されました)。
光度曲線近似中にフラグが付けられた外れ値 (図では赤で表示) も、セラムの 2 つの光度曲線極小点の後の同様の時間に続く一貫した自転位相で発生するため、興味深いものです。これらの低点の合理的な説明は、2 つの天体間の相互イベントです。これらは、一般に、宇宙船の p から天体が互いを掩蔽することから生じます。測光を時間の関数として見ると、低いポイントはセラムの自転周期の半分の間隔で一定間隔で現れます。絶対タイミングからの幾何学的制約は、イベントが互いの影の通過であり、視線に沿った物理的な掩蔽 (掩蔽) ではないことを示しています。さらに、タイミングはセラムの軌道運動が逆行していることを明確に示しており、これはディンキネシュの自転にも当てはまります。時間内に見られる最初のディップと 3 番目のディップは下位の影のイベントであり、中間のディップは上位のイベントです。位相プロットでは、2 つの下位イベントが互いに重なり合い、イベントのより完全な光度曲線を描きます。上位イベントは測定値が少なく、ディップの不完全なプロファイルを示し、2 つのポイント セットの中央にあるはずの最大食ポイントを逃しています。
表面の礫類が赤道に移動、遠心力が重力より勝ると分離してリングに成りロシュ限界を超えて離れたら纏まって衛星の出来上がり。以下、機械翻訳。
小惑星(152830)ディンキネシュの接触連星衛星
直径が約5km未満の小惑星は、放射トルク(YORP、Yarkovsky–O'Keefe–Radzievskii–Paddack効果)に対して十分に小さいため、複雑な歴史を持っています[Bottke等、2006]彼らの進化の注目すべき要因であること[Margot等、2015].(152830) ディンキネシュは、太陽中心の長半径2.19AUで、主小惑星帯の内縁付近で太陽の周りを公転する小さな小惑星である。そのS型スペクトル[Bolin等、2023; de León等、2023]は、メインベルトのこの部分のボディに典型的です[デメオ&キャリー、2013].ここでは、探査機「ルーシー」による観測結果を報告します[Levison等、2021; Olkin等、2021]ディンキネシュから431km以内を通過したからです。ルーシーはディンキネシュを明らかにしたが、これは有効直径が∼720m、意外と複雑です。特に注目すべきは、赤道直下の海嶺に覆われた顕著な縦方向のトラフの存在と、現在(152830)セラムと名付けられている最初の接触連星衛星の発見である。セラムは、直径が∼210m と∼230m.ディンキネシュの公転周期は約52.7時間で、距離3.1kmで、潮汐ロックされている。この系の力学的状態、角運動量、地形学的観測から、ディンキネシュの海嶺とトラフは、おそらくYORPによるスピンアップとそれに続く脱落物質の部分的な再降着による質量破壊の結果であると推測される。セラムは恐らく、この出来事によって流された物質から降着したのだろう。
ディンキネシュはルーシーのミッションに後から加わったもので、主にルーシーの作戦の重要な要素である自律的な測距・追跡システムの飛行中テストを目的として いた[Olkin等。、 2021].フライバイの形状は、ミッションの後半で遭遇するトロヤ群のターゲットの形状を忠実に模倣していたため、魅力的なターゲットでした[Levison等。、 2021]です。 ルーシーは太陽の位相角120°でディンキネシュに接近し、接近すると位相は急速に低下し、ほぼゼロを通過し、その後60のアウトバウンド位相に増加した∘です。ルーシーとディンキネシュの相対速度は秒速4.5kmであった。最接近時、ルーシーは ディンキネシュから430.629±0.045kmで、ルーシー-ディンキネシュ-太陽の角度は30°でした.
高解像度画像のサンプルを図1に示す。1.ディンキネシュの基本的な形状は、地球近傍小惑星(NEA)の集団に見られる「上」の形状を彷彿とさせます(例えば、モシャップ [Ostro等。、 2006]、ベンヌ[Barnouin等。、 2019]リュウグウ[渡邊 et al.、 2019]、そして程度は低いが、ディディモス[Palmer等。、 2023; Campo Bagatin et al. (カンポ・バガティン他)、 2023]).ディンキネシュも同じような大きさです。以下で詳しく説明するように、ディンキネシュの有効直径は719 mですが、ベンヌ、リュウグウ、ディディモスの有効直径は∼560 m と∼900メートルその間です。
これらの天体と同様に、ディンキネシュ島は顕著な赤道海嶺によって支配されています。ディンキネシュには、尾根にほぼ垂直に走る大きなトラフもあります。リュウグウとディディモスはどちらも似たような機能を持っていますが[杉田他、 2019; Barnouin等。、 2024年、投稿済み]、ディンキネシュのトラフはより実質的であるように見えます。尾根は谷に重なり、2つの構造のうち若い方であることを示しています。しかし、その絶対的な年齢に関する情報はなく、同じ出来事で形成された可能性がある。
遭遇を通して得られた高解像度の画像(方法/観察のセクションを参照)により、各コンポーネントの形状モデルを再構築することができます。ディンキネシュとセラムのサイズが小さいため、接近遭遇の前後数分間しか有用な分解能イメージングが可能ではありませんでした。ディンキネシュの自転が観測されたが、自転によって明らかになった追加の地形の量は少なかった(∼10%)を本体の照らされていない部分と比較します。セラムの自転運動や軌道運動は見られなかった。セラムから見たディンキネシュの反太陽半球の照らしは、観測するにはあまりにも微弱だった。したがって、画像では各体の1つの半球しか見えません。ただし、観測されていない半球の制約は、両方の地面からの測光によって提供できます[Mottola等。、 2023] そしてルーシーは、遠すぎてターゲットを解決できませんでした。したがって、システムの形状と構造についてさらに議論する前に、この測光の分析に注意を向けます。
遭遇後の光度曲線測光キャンペーンからの未解決のデータ(方法/観測のセクションを参照)を図1に示します。 2.これらのデータから、セラムの回転の光度曲線への寄与は T = 52.44 ±0.14時間で周期性を持つことを決定する
、地上観測から判明した52.67時間±0.04時間周期[Mottola等。、 2023]に匹敵
です。地上での周期である52.67時間を採用しているのは、サンプリングベースラインが長いため、より正確だからです。また、遭遇後の光度曲線は、ディンキネシュとセラムの52時間周期の相互日食によるものと推測されるディップも示しています(図1)。 2、および方法/観測のセクション)は、セラムの公転周期が自転周期と非常によく似ていることを示しています。これは、システムが潮汐ロックされていることを意味すると解釈します。の形式主義を使用して、 [Jacobson & Scheeres, ジェイコブソン&シェールズ2011年Aの]では、潮汐効果がセラムの長軸をディンキネシュに対して放射状に整列させる時間スケールは、次数で短くなると推定される
10
5
現在の分離では、いくつかの重要な放射線の影響があるため、それらの形式は正確ではない可能性がありますが、[Bottke等。、 2006]考慮されませんでした[ポウ&ニモ、 2024]です。また、ディンキネシュの中心とセラムの2つのローブは、1本の線に沿って横たわっているように見えることもわかった(図1)。1m) — 潮汐ロックシステムと一致します。したがって、セラムは同期自転しており、ディンキネシュを52.67時間の周期で公転していると結論付けた。遭遇後の光度曲線における相互事象のタイミング(図1)。 2)は、フライバイ中のセラムの軌道位置を基準に、セラムの軌道がディンキネシュの地動説軌道に対して逆行していることを示している。
一次ディンキネシュはより速く回転し、光度曲線に最も適合するとスピン周期はP = 3.7387±0.0013時間になります
フライバイ中の地物追跡は、自転が黄道の北に対して逆行していること、すなわちセラムの軌道と同じ意味であることを示している。全体的なスピン状態(同期する二次小惑星と高速回転する一次小惑星)により、ディンキネシュは、衛星が近接している地球近傍小惑星やメインベルト小惑星の大部分と類似している[Pravec et al.、 2016].
ここで、ディンキネシュとセラムの形の話に戻ります。「方法/形状」の項で説明したプロセスによって、ルーシーの軌道の予備的な再構成に基づいて作成されたディンキネシュのモデルを図1に示す。 3.体積等価球の直径はこの形状モデルに基づくディンキネシュの場合は719±24mであることがわかります 。セラムは2つの異なる葉から成り立っているように見える。しかし、接触点は遭遇時に影になっていたため、首の正確な性質は不明です。接近時に撮影された画像で、外側のローブが内側のローブよりも探査機から遠く離れている状態です(図1参照)。 1h例)は、首が ∼67%インナーローブの直径の。212±21m の等価球形直径が見つかります
および234±23 m は、楕円を四肢のプロファイルに近づけることに基づく Selam の内側と外側のローブです。ローブが互いの周りを軌道上にある場合、それらの周期は次のようになります。
∼4
これは、上記のライトカーブの観測値と矛盾します。さらに、その期間が短ければ、動きを検出したでしょう。したがって、ローブは互いに重なり合っている必要があり、セラムは接触連星である可能性が高い。
アウトバウンド画像は、セラムの両葉をはっきりと示しています(図1)。1m)は、三角測量によって決定されるように、それらの間のベクトルにほぼ垂直な方向から。これらの画像から、ディンキネシュとセラムの間の図の中心の分離の予備的な推定値は、
3.11±0.05km
フライバイ時の。Methods/Mass&Densityの節で、Selamは円軌道上にあると主張する。もしそうなら、この分離は相互軌道の長半径を表す。
ディンキネシュとセラムの空間における向きは、現在のデータで推定することができる。特にディンキネシュの場合、遭遇中に観察された少量の回転と、その形状モデルの短軸の方向は、その傾斜を示唆しています
∼178.7±0.5∘(つまり、その回転軸は∼1∘その軌道面に垂直であることから)。衛星の場合、遭遇後のルーシー観測で観測された相互日食と、2022年から2023年の地上の光度曲線[6]から推測される相互事象は、その軌道面がディンキネシュの地動説軌道面に近いことを示唆しています。したがって、ディンキネシュの地動説軌道、セラムの軌道、ディンキネシュの赤道面の3つすべてが互いに近接している可能性があります。この配置は、小さな連星小惑星にほぼ遍在しています[マーゴット等、 2002]YORP効果による非対称熱輻射力によるスピンポールの配向転向の結果[Bottke等。、 2006].YORP タイムスケールが∼10^7yr は、ディンキネシュのスピン極がゼロまたは 180°に近づくことを示します。 [Pravec et al.、 2012; スタットラー、 2015].
また、セラムの内葉は隆起した構造をしています(図1)。 1h-k)です。セラムの両葉は平らなファセットとブロック状で角張った全体的な形状を持ち、見かけの隆起はそのような2つのファセットの境界である可能性があります。しかし、もしこの構造がディンキネシュを中心とする円盤からの物質の降着によって形成されたとすれば、予想通り、もともとは軌道面とディンキネシュの海嶺の両方に整列していたはずである。その場合、セラムの隆起は接触連星の形成中にずれた可能性が高いが、これは、1)セラムが現在その長軸の周りを回転または臆走しているか、または2)接触前に形成された隆起のいずれかであることを示唆している。セラムの観察された構造は、少なくとも部分的には瓦礫の山であることを示唆しています。しかし、セラムの角張った連星の形状は、内部強度が顕著であることを示唆しており、ディディモスの衛星であるディモルフォスの扁平な回転楕円体の形状とは大きく異なっている[Daly等。、 2023]サブkmの小惑星(これもS型)の他の唯一の衛星で、詳細な画像があります。
ディンキネシュの鉱物学とかさ密度は、その構造に制約を与えます。ディンキネシュのかさ密度は
2400±350kg/m^3(Methods/Mass&Densityセクション)は、通常のコンドライト鉱物学を持つオブジェクトの期待値の範囲にあります。L-コンドライト隕石の嵩密度は、通常のコンドライトの範囲の優れた類似物です。[Scheeres等。、 2015]S型小惑星の鉱物学的期待値、平均3360±160kg/m 37.5%の微小気孔率を使って[マッケ、 2010].方法/質量と密度のセクションで説明したディンキネシュのかさ密度の不確実性を考えると、これは
25±10%.そのかさ密度は、この鉱物学のS型NEAと同族であり、このサイズ範囲にあります。たとえば、Didymos の密度は
2800±280kg/m3 [Barnouin等。、 2024年、投稿済み]、イトカワのかさ密度は1900±130kg/m3 [藤原ら、 2006]レーダーで観測された連星Moshupは、
1970±240kg/m3 [Ostro等。、 2006].低密度の天体は、ディディモスよりもはるかに多孔質で、より顕著な瓦礫の山構造をしており、ディンキネシュはその中間に位置している。ディンキネシュとディディモスは、おそらく、天体のかなりの部分が比較的首尾一貫している連続体の一部にある。
Dinkinesh がシステムのボリュームの 94% を占め、Selam が 6% を占めています。すべての成分の密度が等しいと仮定すると、ディンキネシュとセラムの成分質量はM𝐷 = 4.67×10^11と M𝑆 = 0.28×10^11kgです。これらの成分質量を使用して、重心がディンキネシュの重心からS𝑏ar𝑦 = 176m距離だけSelamの方向にずれていると計算できます。プライマリの本体内部に深くあります。
図1は、ディンキネシュが過去に世界的な構造的破綻に見舞われたことを強く示唆している。その規模の大きさから、この事象はYORP効果によるスピンアップの結果である可能性が高い [平林 et al.、 2015; Bottke等。、 2006]については、図1の説明を参照してください。 4キャプション。true の場合、ディンキネシュ系の角運動量は、スピン障壁限界付近で回転する母体の総角運動量に匹敵するはずです [Pravec & Harris、 2007]です。実際、ディンキネシュ系には、回転分裂に必要な角運動量の88%が含まれていることがわかった(cf. Methods/AngularMomentumの節を参照)、ディンキネシュの構造は角運動量が大きいために失敗したという考えと一致している。
ディンキネシュは、地球近傍とメインベルトの両小惑星と多くの特徴を共有しており、近距離で研究された唯一のサブkmサイズのメインベルト天体である。小さな小惑星の約15%が連星であることが観測されています[マーゴット等、 2002; Pravec et al.、 2006].十分に特徴付けられているこれらの系のサブセットの場合、支配的なパターンは、半長軸を持つほぼ円形の軌道に同期二次を持つ系です。
ある
の ≈ 3またはそれ以上の一次半径、r𝑝𝑟i𝑚 [Pravec et al.、 2006].セラムの半長軸a/𝑟𝑝𝑟i𝑚 ≈ 9は、同程度のサイズで、より近くにクラスター化する、十分に特徴付けられた他のシステムの大部分と比較して幅が広いです。
a/𝑟𝑝𝑟i𝑚 ≈ 3 [Monteiro et al. (モンテイロ他)、 2023].ディンキネシュのスピン周期も、≈ 2.5 NEAバイナリ母集団で通常観察されるhr期間[Pravec et al.、 2006].考えられるシナリオの1つは、セラムはもともとディンキネシュの近くで形成され、その後、潮汐相互作用や連星YORPによってより大きな長半径に進化し、ディンキネシュの自転も遅くしたというものです[Jacobson & Scheeres, ジェイコブソン&シェールズ2011bの].
ディンキネシュ・セラム系の最も特徴的な特徴は、セラムの接触二元構造である。無花果。図4は、その形成のための3つの可能なシナリオを示している。セラムの連星的な性質は、どのように形成されたかにかかわらず、これらの衛星システムの形成に重要な制約を課します。第一に、2つのローブの直径がほぼ同じであるという事実は、セラムの原因となった衛星形成過程が、特定の大きさの物体を造るのに有利であることを示している。私たちが知る限り、文献のどの形成モデルもこの要件を満たすことが示されていません。第二に、上で説明したように、2つのローブは別個の体です。したがって、2つのローブを一緒にするプロセスは、ローブが生き残るのに十分な速度で行ったに違いありません。
ディンキネシュ星系の予想外の複雑さは、メインベルトの小さな小惑星がこれまで考えられていたよりも複雑であることを強く示唆している。より大きな天体の周りの軌道上で接触連星が形成されるという事実は、イトカワのような小さな二葉天体の形成に新たな様式があることを示唆している[藤原ら、 2006]そのため、かつてはディンキネシュのようなシステムの構成要素であった可能性があり、その後、束縛が解かれました。
図 1. ルーシーの接近撮影キャンペーンで得られたディンキネシュとセラムの画像。
a–f) 接近時、近距離接近時、離陸時にそれぞれ撮影された画像の交差視ステレオ バージョン (撮影キャンペーンの説明については、「方法/観察」セクションを参照)。ディンキネシュには、2 つの主要な地質学的特徴があります。縦方向の谷と赤道の尾根です (それぞれ黄色とバラ色の点)。図 1a の 2 つの色付き矢印 (緑と青) は、図 3 で説明した 2 つの基準経度で目視により決定された尾根の北の境界を示しています。g) 谷を取り除いたディンキネシュのシミュレーション画像。これは、図 1a の修正バージョンで、シアンの領域が画像内で左下 (水平から 26 度) に 79 m 移動され、時計回りに 7 度回転されています。この再構成画像の色の遷移付近でディンキネシュの縁の輪郭が滑らかであるという事実から、谷は構造的欠陥によってシアン領域が体の残りの部分から離れた結果であると推測されます。h~k) それぞれ接近時および接近間近で撮影されたセラムのステレオ画像ペア。l) 離陸時に撮影されたセラムの単一画像。接近後 10 秒から 5.5 分までセラムは L'LORRI の視野外にあったため、ステレオ画像は不可能です。セラムの画像により、その複雑な形状を 3 軸楕円体として大まかに近似することで、葉の大きさを視覚的に推定できます。ディンキネシュ ベクトル、軌道方向、および自転極に平行な方向における内側ローブと外側ローブの長軸の長さは、それぞれおよそ 240 × 200 × 200 m と 280 × 220 × 210 m であることがわかりました。
m) システム全体の出発画像。また、図 1m を除くすべての画像はデコンボリューションされています。図 1l と m は同じ画像なので、比較するとデコンボリューションの効果を示しています。黄道の北はすべてのフレームでほぼ上になっていますが、ディンキネシュの本体の北は逆行自転しているため下になっています。画像の詳細は次のとおりです。接近に対する時間 (分単位): a: -1.04、b: -1.29、c: +0.21、b: -0.04、e: +2.21、f:
+1.71、h: -2.29、i: -3.29。 j: -0.29、k: -0.54、l & m: +5.46。元のピクセルスケール、m/ピクセル: a: 2.53、b: 2.72、c:
2.14、d: 2.12、e: 3.63、f: 3.11、h: 3.70、i: 4.85、j: 2.16、k: 2.24、l & m: 7.56。太陽位相角、度: a:
62.1、b: 68.0、c: 21.5、d: 30.5、e: 25.0、f: 17.8、h: 84.2、i: 93.3、j: 39.3、k: 47.7、l & m: 44.5。
図 2. ディンキネシュとセラムの位相光度曲線。a) 3.7387 時間の周期で折り畳まれたディンキネシュの位相光度曲線。b) 52.67 時間の周期で折り畳まれたセラムの位相光度曲線。これらの周期は、方法/光度曲線分析セクションで開発されたように、アウトバウンド光度測定から決定されました。生の光度測定は、拡張データ図 1 に示されています。黒の実線点は、周期を導出するために使用されました。ディンキネシュの光度曲線は、セラムの光度曲線よりも複雑です。実際、セラムの光度曲線は、この位相角 (60◦) で端から見た 2 つの回転する球体からなる接触連星に予想されるものを彷彿とさせます [Lacerda 2008]。中空の赤い点は除外されており、相互イベントに対応しています。矢印は、異なるタイプのイベントが予測される時期を示しています。ルーシー宇宙船のシンボル でマークされたイベントは、掩蔽(宇宙船の視点から、一方の物体がもう一方の物体の前を通過すること)が発生した場合に発生します。太陽のシンボル ⊙ でマークされたイベントは、日食(一方の物体の影がもう一方の物体に落ちること)が発生する可能性のある時間を示します。観測された相互イベントは日食に関連しています。掩蔽は出発時にルーシーによって観測されませんが、これはルーシーの軌道がディンキネシュの軌道面に対してわずかに傾いているという事実と一致しています。緑の矢印は、セラムがディンキネシュの周りを順行軌道で回っている場合に発生するイベントを示し、オレンジ色の矢印は逆行軌道で発生します。このことから、セラムの軌道は逆行であると結論付けることができます。
図 3. ディンキネシュの形状モデル。赤道山脈の構造を強調するために設計された 3 つの方向 (挿入図) と地形の切断。方法/形状のセクションで説明されているこのモデルは、2 つの領域で構成されています。遭遇時にルーシーに面していたモデルの側面は、接近撮影キャンペーン中に撮影された画像に基づいています (方法/観察のセクションを参照)。ディンキネシュの照らされていない部分は、超楕円体で推定されています。これらの図では、回転 (z) 軸は上を向いています。オレンジ色の曲線は、山脈に沿った緯度方向の切断を示しています。青色と緑色の曲線は、それぞれ赤道山脈の最低標高と最高標高に対応する経度方向の切断です。X1 と X2 のラベルが付いた点は、それぞれ緑色と青色の曲線がオレンジ色の曲線と交差する場所を示しています。大きな点は、図 1a で視覚的に判断できる尾根の北の境界の位置 (対応する青と緑の矢印) を示し、水平の破線は尾根の範囲を示します。尾根は、最低地点で幅 150 m、高さ 40 m で、最高地点では幅 230 m、高さ 100 m です。曲線は、形状モデルが信頼できる場所では実線で、それ以外の場所では点線で示されています。A1、A2、A3、B1、B2、B3、X1、X2 というラベルの付いた参照位置は、読者が形状モデルを曲線に関連付けることができるように含まれています。
図 4. ディンキネシュ-セラム システムの現在の構成に至る一連の出来事を簡略化した図解。直径が ≈ 10 km 未満の小惑星は、YORP 効果によってスピンアップする傾向がある [Bottke 他 2006]。主小惑星の急速なスピンとそれに伴う遠心力は、最終的に構造破壊を引き起こし、突然の質量放出につながる [Hirabayashi 他 2015]。このイベントは、天体の一部の質量移動 (図 1g) によって、ディンキネシュに見られる谷 (図 1a–f) も生成した可能性がある。放出された物質はリングを形成し、一部の物質は合体して衛星になり、より近い物質は最終的に赤道の表面に落下して尾根を形成する [Hyodo & Sugiura 2022]。接触連星の形成は、2つの衛星が合体した結果である可能性があります。衛星は、a) 単一の質量放出イベント、またはb) 2つの別々のイベントで形成されました [Madeira & Charnoz 2024]。c)
別のシナリオでは、セラムは単一の天体として形成され、その後、自転軌道結合により分裂しました [Jacobson & Scheeres 2011a; Jacobson et al. 2016]。セラムの一部またはすべてが主星への衝突から形成された可能性もあります [Michel et al. 2020]が、谷と尾根はそのようなイベントを生き延びなかったでしょう。したがって、このメカニズムでは、YORPによるディンキネシュのスピンアップと、谷と重ねられた赤道尾根を形成するための質量放出が、その後必要になります。
観察:
ここで紹介する分析は、ルーシーの長距離偵察用画像装置 (以下、L’LORRI) で撮影されたパンクロマティック (350 - 850 nm) 画像に基づいています。L’LORRI は、1024 × 1024 ピクセルの CCD 焦点面に信号を送る 20.8 cm、f/13 の望遠鏡です [Weaver
et al. 2023]。L’LORRI の視野は 0.29◦、ピクセル サイズは 5 µrad です。
L’LORRI は、主に遭遇時の 3 つの異なる観測キャンペーンで使用されました。1) 光学航法再構成画像は、ルーシーの軌道を正確に特定するために設計されました。遭遇の ±4 日間 (tCA = –4 から +4 日) は毎日、tCA = –2 時間から +2 時間までは 15 分ごとに撮影されました。 2) 高解像度の接近画像。tCA= -10 分から +9 分まで 15 秒ごとに撮影され、その後 +55 分まで 1 分間隔で撮影されました。3) 遭遇後の光度曲線測光は、tCA= +4 時間から +95 時間まで取得されました。3 回の露出は 1 時間間隔で撮影されました。この時点では、DinkineshSelam システムは未解決でした。データ量を最小限に抑えるため、これらのデータは L'LORRI のいわゆる 4×4 モードで撮影されました。このモードでは、CCD の読み出し中に 4×4 ピクセルごとにデータがまとめられます。
光度曲線分析:
Selam の軌道周期と Dinkinesh の自転周期は、上記の方法/観測セクションで説明した遭遇後の光度曲線測光法を使用して決定できます。システムの機器等級は、半径 1.5 ピクセルの絞りを使用して画像から抽出されました。小さな絞りは、近くの星からの混入を排除する役割を果たしました。抽出による正式な誤差は、フィッティング結果の最終的な不確実性を決定する前に、縮小された χ^2を 1 に調整するために、係数 1.545 で上方にスケーリングされました。分析された画像は 267 枚でした。
データは、変化する距離に対して補正され、位相係数 0.06 mag/deg を使用して一定の太陽位相角に修正されました。位相角は、開始時の 60.52◦ から終了時の 59.67◦ まで変化しました。観測方向は 3.5 日間でほとんど変化せず、これらの補正によりこれらのわずかな変化が除去され、システムの全体的な測光特性の記録のみが残ります。結果として得られた光度曲線は、相対フラックス単位で拡張データ図 1 に示されています。
光度曲線は、ディンキネシュとセラムからの全フラックスへの寄与を分離するように設計された反復プロセスで分析されました。最初のステップとして、光度曲線のフーリエ級数展開と各オブジェクトの周期を組み合わせたモデルが構築されました。回転位相の基準時間は、両方のオブジェクトの最初のデータ ポイントの時間に任意に設定されました。ディンキネシュの平均フラックスは、モデル内の自由パラメーターでした。さらに、セラム/ディンキネシュの平均フラックス比を反復的に変更しました。この比率は、2 つのオブジェクトの可視領域の比率が 0.25 であることを示す、接近解像画像 (たとえば、図 1d) によって制約されます。 2 つの天体の表面輝度も類似しており、未分解フラックス比も 0.25 です。セラムは真横から観測されるため、この比は両方の天体で最小光量であると想定されました。光度曲線を分離した後、最小フラックスから平均フラックスに補正するための反復補正が適用され、最終的な平均フラックス比は 0.33 (1.3 の等級差に相当) に設定されました。
モデル パラメータは、一連の反復ステップで決定されました。最初のパス フィットでは、ディンキネシュの適切な平均フラックスが設定され、フーリエ項は無効になりました。
この時点で、セラムのみがデータに適合するように自由に調整できました。データは周期的にスキャンされました。各ステップで、最も適合するフーリエ級数が計算され、χ 2 が記録されました。最小の χ 2 周期では、セラムの予備値は 51.76 時間でした。このモデルは光度曲線データから減算され、同様のスキャンが Dinkinesh のみのデータに対して実行されました。Dinkinesh スキャンは、約 3.7 時間と約 4.3 時間の周期で χ 2 の 2 つの興味深い最小値を返しました。すべての周期は、光度曲線が二重ピークであると仮定していることに注意してください。2 つの予備周期が与えられた後、データは 2 つのオブジェクトからの完全なモデルに適合され、すべての自由パラメータはアメーバ χ 2 最小化 [Press ら 1992、第 10.4 章] と同時に最適化されました。アメーバ適合を出発点として不確実性に対する事後補正を行い、2 回目のマルコフ連鎖モンテカルロ適合 [Foreman-Mackey ら 2013 参照] をモデルに対して実行しました。不当に大きい残差のために除外されたデータ ポイントは 18 個ありました (以下の説明を参照)。最終的にフィッティングされた光度曲線は、セラムの振幅が 0.82 等級、ディンキネシュの振幅が 0.25 等級であることを示しています。
このフィッティングからセラムの自転周期は 52.44 ± 0.14 時間であると決定されましたが、相互イベントの存在によって示されるように、潮汐ロックされている可能性が高いため、ディンキネシュの周りの軌道周期にも起因します。結果として得られた位相光度曲線を図 2 に示します。
2 つのオブジェクトのフラックスの変化は偶然にもほぼ同じです。ディンキネシュの方がはるかに大きいため、フラックスの相対的な変化は小さいことを意味します。
セラムの光度曲線は、わずかに非対称な最大値とわずかに広がった最小値を捉える 2 つのフーリエ項によってよくフィッティングされます。ディンキネシュの光度曲線は、極小値と最大値の両方が非対称でかなり複雑ですが、明らかに高次の変化も見られます。この場合、4 項フーリエ近似が必要でしたが、それでも曲線の詳細をすべて完全に捉えることはできません。
たとえば、極小点の 1 つは、4 項近似で追跡できる範囲よりもシャープです。
ディンキネシュの自転周期は 3.7387 ± 0.0013 時間であると判定されました (前述の 4.3 時間はエイリアスであると判定されました)。
光度曲線近似中にフラグが付けられた外れ値 (図では赤で表示) も、セラムの 2 つの光度曲線極小点の後の同様の時間に続く一貫した自転位相で発生するため、興味深いものです。これらの低点の合理的な説明は、2 つの天体間の相互イベントです。これらは、一般に、宇宙船の p から天体が互いを掩蔽することから生じます。測光を時間の関数として見ると、低いポイントはセラムの自転周期の半分の間隔で一定間隔で現れます。絶対タイミングからの幾何学的制約は、イベントが互いの影の通過であり、視線に沿った物理的な掩蔽 (掩蔽) ではないことを示しています。さらに、タイミングはセラムの軌道運動が逆行していることを明確に示しており、これはディンキネシュの自転にも当てはまります。時間内に見られる最初のディップと 3 番目のディップは下位の影のイベントであり、中間のディップは上位のイベントです。位相プロットでは、2 つの下位イベントが互いに重なり合い、イベントのより完全な光度曲線を描きます。上位イベントは測定値が少なく、ディップの不完全なプロファイルを示し、2 つのポイント セットの中央にあるはずの最大食ポイントを逃しています。










※コメント投稿者のブログIDはブログ作成者のみに通知されます