








ニューホライズンズ観測によるアロコスの形状と重力と自転の遠心力の平衡点。以下、機械翻訳。
カイパーベルト天体(486958)アロコスの表面ダイナミクス、平衡点、および個別のローブ
概要
NASAの探査機ニューホライズンズは、最も原始的なものの1つに初めて接近した
太陽系の形成から残された遠方の物体、接触バイナリのカイパーベルト物体(486958)アロコス、これは2つの祖先で構成される、
ウルティマとトゥーレというニックネームのローブ。現在の作業では、アロコスの
表面の詳細を確認して、平衡点の位置を特定し、それぞれを探索します
葉の個々の動的機能。アロコスの不規則な形状は、均一な多面体接触バイナリとして想定されます。その動的特性を数値的に調査します
不規則なバイナリジオポテンシャルを計算して、幾何学的な高さ、偏平率、楕円率、ゼロパワーカーブなどの量を調べます。アロコスヒルの安定性
また、速度ゼロの曲線を通じて調査されました。アロコスの外部平衡点
非常に不規則な形状のため、放射状の対称性はありません。その形状とスピンレートに関する平衡点も特定しました。つまり、4つの不安定な外部平衡
点と3つの内部平衡点。2つの点は線形安定です。
重心からわずかにずれている不安定な中心点。また、大小さなローブには、トポロジー構造の異なる5つの平衡点があります。
アロコスで見つかったものから。私たちの結果はまた、赤道地域のアロコスのローブは、回転周期が長いために不安定な領域ですが、極
場所は、表面粒子の安定した静止サイトです。最後に、ゼロパワー曲線 質量のない粒子が増強を体験するアロコス周辺の場所を示す
そして軌道エネルギーの後退。
キーワード:方法:数値-天体力学-小惑星、カイパーベルト天体(486958)アロコス。

図1. 6つの透視図(±x、±y、±z)で示される、アロコスの3Dにおける幾何学的な多面体形状モデル。 形が作られました
1,046個の頂点、2,928個のエッジ、および1,952個の三角形の面があります。 カラーコードは、主軸xからの重心ファセット距離x(km)を示します
(幾何学的な高さ)。 3Dアロコス多面体形状モデルのアニメーションムービーがオンラインで入手できます(ムービー1)。

図2.(左側)+ xの主軸から見たアロコスの地形形状。 黒いバーはおおよその幅を示し、
x軸(0)からkmで測定した「ネック」の長さ(小葉と大葉) (右側)から見たアロコス形状
+ z主軸。 黒いバーは、Arrokoth幾何学的中心(0)からのx軸に沿った距離(km)を示します。 角度
速度ベクトルは、右手の法則に従ってz軸方向に沿って取得され、ボディの重心(0)にもあります。 色
コードは、幾何学的な高さをkm単位で示します。

図3. Arrokoth地形の等高線のレベル曲線。 の
カラーバーは、主軸xまでの深さをkmで示します(幾何学的
高さ)。 黒い等高線は2 kmごとのレベルを表します

図4.表面全体で計算された表面傾斜角のマップ
斜視図-x、-y、および-zに示されているアロコスの図。 色
コードは、それぞれの法線ベクトル間の角度(度)を与えます
ファセットとx軸を原点とし、xで終わるベクトル顔の重心。

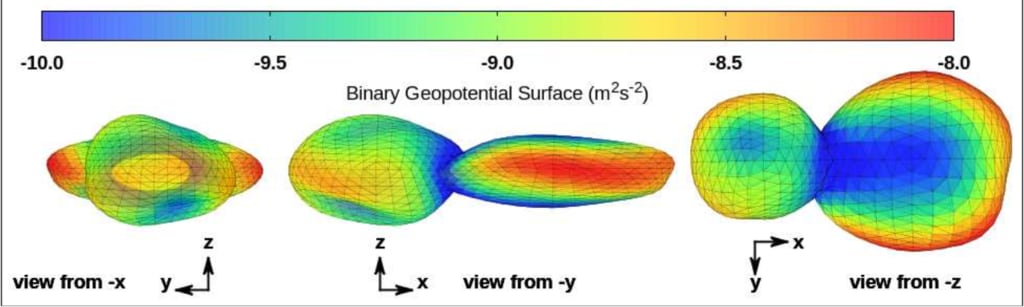
図5. xOy、xOz、およびyOz平面でのArrokoth接触バイナリの重力ポテンシャルエネルギー。
等高線はバイナリ等電位曲線を表し、
カラーコードは、アロコット相互重力ポテンシャルUbの強度をm2s−2 で示します。
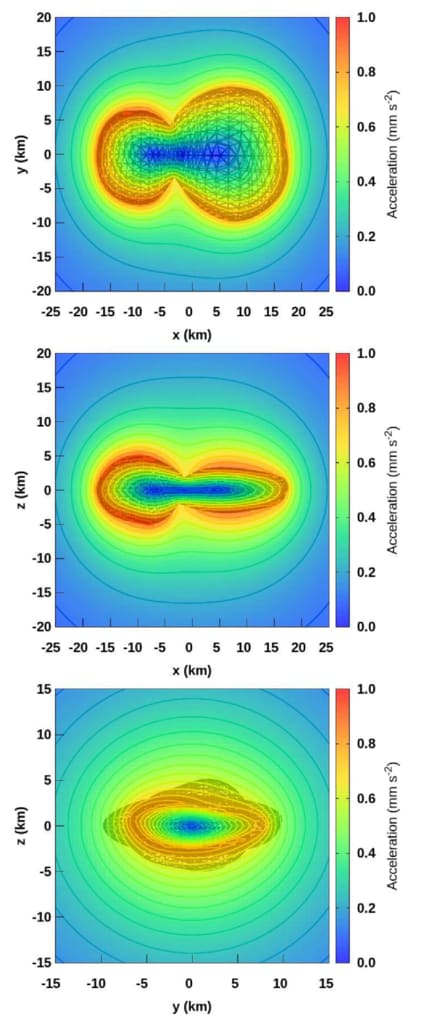
図6. Arrokoth接触バイナリの数値重力場
xOy、xOz、およびyOz平面でそれぞれ。 輪郭レベル
力の線を示し、カラーパネルは強度を与えます
重力引力ベクトルの(加速)| −∇Ub | mm s−2。
カイパーベルト天体(486958)アロコスの表面ダイナミクス、平衡点、および個別のローブ
概要
NASAの探査機ニューホライズンズは、最も原始的なものの1つに初めて接近した
太陽系の形成から残された遠方の物体、接触バイナリのカイパーベルト物体(486958)アロコス、これは2つの祖先で構成される、
ウルティマとトゥーレというニックネームのローブ。現在の作業では、アロコスの
表面の詳細を確認して、平衡点の位置を特定し、それぞれを探索します
葉の個々の動的機能。アロコスの不規則な形状は、均一な多面体接触バイナリとして想定されます。その動的特性を数値的に調査します
不規則なバイナリジオポテンシャルを計算して、幾何学的な高さ、偏平率、楕円率、ゼロパワーカーブなどの量を調べます。アロコスヒルの安定性
また、速度ゼロの曲線を通じて調査されました。アロコスの外部平衡点
非常に不規則な形状のため、放射状の対称性はありません。その形状とスピンレートに関する平衡点も特定しました。つまり、4つの不安定な外部平衡
点と3つの内部平衡点。2つの点は線形安定です。
重心からわずかにずれている不安定な中心点。また、大小さなローブには、トポロジー構造の異なる5つの平衡点があります。
アロコスで見つかったものから。私たちの結果はまた、赤道地域のアロコスのローブは、回転周期が長いために不安定な領域ですが、極
場所は、表面粒子の安定した静止サイトです。最後に、ゼロパワー曲線 質量のない粒子が増強を体験するアロコス周辺の場所を示す
そして軌道エネルギーの後退。
キーワード:方法:数値-天体力学-小惑星、カイパーベルト天体(486958)アロコス。
図1. 6つの透視図(±x、±y、±z)で示される、アロコスの3Dにおける幾何学的な多面体形状モデル。 形が作られました
1,046個の頂点、2,928個のエッジ、および1,952個の三角形の面があります。 カラーコードは、主軸xからの重心ファセット距離x(km)を示します
(幾何学的な高さ)。 3Dアロコス多面体形状モデルのアニメーションムービーがオンラインで入手できます(ムービー1)。
図2.(左側)+ xの主軸から見たアロコスの地形形状。 黒いバーはおおよその幅を示し、
x軸(0)からkmで測定した「ネック」の長さ(小葉と大葉) (右側)から見たアロコス形状
+ z主軸。 黒いバーは、Arrokoth幾何学的中心(0)からのx軸に沿った距離(km)を示します。 角度
速度ベクトルは、右手の法則に従ってz軸方向に沿って取得され、ボディの重心(0)にもあります。 色
コードは、幾何学的な高さをkm単位で示します。
図3. Arrokoth地形の等高線のレベル曲線。 の
カラーバーは、主軸xまでの深さをkmで示します(幾何学的
高さ)。 黒い等高線は2 kmごとのレベルを表します
図4.表面全体で計算された表面傾斜角のマップ
斜視図-x、-y、および-zに示されているアロコスの図。 色
コードは、それぞれの法線ベクトル間の角度(度)を与えます
ファセットとx軸を原点とし、xで終わるベクトル顔の重心。
図5. xOy、xOz、およびyOz平面でのArrokoth接触バイナリの重力ポテンシャルエネルギー。
等高線はバイナリ等電位曲線を表し、
カラーコードは、アロコット相互重力ポテンシャルUbの強度をm2s−2 で示します。
図6. Arrokoth接触バイナリの数値重力場
xOy、xOz、およびyOz平面でそれぞれ。 輪郭レベル
力の線を示し、カラーパネルは強度を与えます
重力引力ベクトルの(加速)| −∇Ub | mm s−2。










※コメント投稿者のブログIDはブログ作成者のみに通知されます