








Pepper(ペッパー)の技術仕様や開発環境を世界で初めて公開される
テックイベント「Pepper Tech Festival 2014」が、9月20日(土)
ベルサール渋谷ガーデンで開催され、イベント参加者には
ソフトウェア開発キットSDK(Choregraphe-コレグラフ- 2.0)が先行配布された。

まだソフトバンクからの正式なPepperのソフトウェア開発キットSDKの
一般配布時期はまだ年内未定のようだが。
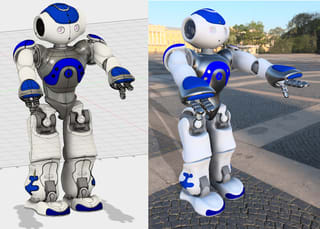
これは開発元であるALDEBARAN Robotics社の自社ブランドの
人型ロボットNAOの開発環境であるソフトウェア開発キットSDK
(Choregraphe 2)がベースになっている。
※アルデバランロボティクス社
○イベントに参加できなかった人やPepperやNAOを持っていなくても
今から90日間無償で開発体験ができる。
ALDEBARAN Robotics社のホームページにはNAOの技術提供や
開発コミュニティができている。
https://community.aldebaran-robotics.com/

ここで技術情報やソフトウェアを入手することが可能だ。
このNAOの開発環境のSDK(Choregraphe 2.1)には、
すでにPepperのバーチャルロボットモデルが入っている。
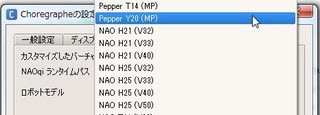
操作も日本語に対応しているので安心だ。

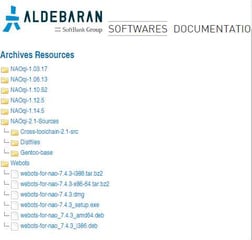
入手先URL
https://community.aldebaran-robotics.com/resources/download/
https://community.aldebaran-robotics.com/resources/archives/
(ダウンロードにはCreate Accountからコミュニティへの参加のユーザ登録が必要)
NAOの3DCADモデルデータ(SolidWorks形式、Blender形式)や
NAOqiOS関連のソースコードもあり技術情報はオープンだ。
最新バージョンChoregraphe 2.1.2が公開されました!
ニュースリリース (2014/11/27)
https://community.aldebaran.com/ja/news/what%E2%80%99s-new-212-version
最新バージョン入手先
https://community.aldebaran.com/en/resources/software
※対応するNAOqiOSのバージョンも最新になっているようなので
今のPepperのNAOqiOSには使えないようだ。(正式出荷ではアップデートされるのか?)
Pepper Software Suite 2.4.2(Choregraphe) 最新バージョン 2015/10/28リリース

https://community.aldebaran.com/ja/resources/software/language/ja
Pepper Software Suite 2.4 マニュアル
https://cloud.aldebaran-robotics.com/naoqidoc/2-4/home_pepper.html
NAOqi 2.4 マニュアル
https://cloud.aldebaran-robotics.com/naoqidoc/2-4/index_dev_guide.html
ドキュメント
https://community.aldebaran.com/ja/resources/documents
チュートリアル
https://community.aldebaran.com/ja/resources/tutorials
トレーニング
https://community.aldebaran.com/ja/resources/trainings
FAQよくある質問
https://community.aldebaran.com/ja/resources/faq
最新情報
https://community.aldebaran.com/ja/news
フォーラム
https://community.aldebaran.com/ja/forum
SDKの Choregraphe 2.0.5.3(PepperSDK.zip)がここでダウンロードできる!
ページの下のほうにリンクあり!
Women Who Code Tokyo
pepperを動かしてみよう!<ロボットプログラミング> 〜Let's program Pepper!!〜
http://www.meetup.com/Women-Who-Code-Tokyo/events/219187757/
 チェックポイント
チェックポイント 3DCADモデルデータを使えば3Dプリンターでオリジナルの筐体や
パーツも3Dプリントできるよ。



Pepperの3DCADモデルデータは今のところ公開されていないようなので、
とりあえずSDKのバーチャルモデルのメッシュデータ(OGRE 3D format)から変換。
Simulator SDK package
http://doc.aldebaran.com/2-1/simulators/simulator_index.html
ポリゴン数が少なく滑らかじゃないのでMeshLabで補正してみた。
※3Dモデルの補正修復ノウハウは同ブログ内過去記事を参照。
(続)3Dプリンターで避けては通れない3つの壁をいかに乗り越えていくか!!【モデル修復の壁】
http://blog.goo.ne.jp/t2com1230/e/bdd903a2ae16efef1138fec6b1ece37d


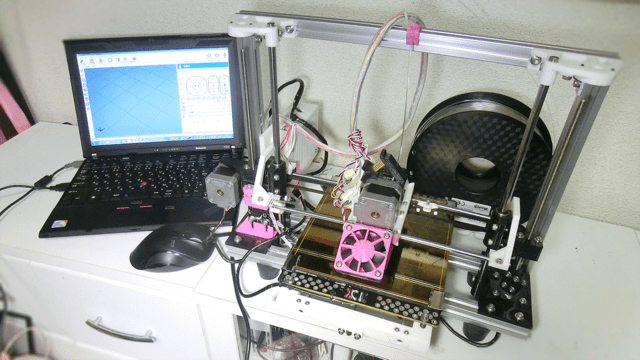
実物大はプリントサイズがちょっと大きくて無理そうなので
縮小版のフィギュア模型サイズでピッチ0.2mmでテストプリント。


まあまあいい感じ。ロボットぽくディテールを強調したほうがいいかな。
(この元データは、alrobotmodel\meshes\juliette\P2フォルダー内のもの。
alrobotmodel\meshes\juliette\DVTフォルダー内の方がディテールが細かい。)
Blenderで補正したほうが綺麗にできるね。
なんか鼻高くなった?アゴのラインも気になる。
どっちのデータも最新のPepperのボディデザインとは若干違う。



ドラゴンボール フリーザ風

スターウォーズ C-3PO風
※このフィギュア模型製作過程の詳細は、
「ソフトバンクの人型ロボットPepperの3Dモデルのプリントに挑戦してみよう!」
の記事(予告)に続く!

○ソフトウェア開発キットSDK(Choregraphe)のインストール内容や
詳しい手順について知りたい場合はこちらのサイトが参考になる。
Pepperチュートリアル (1):SDKインストールとアプリケーションの作成/実行
http://qiita.com/Atelier-Akihabara/items/c5f57358a7b333eef397
Pepper を動かしてみる - 開発ツールインストール編
http://qiita.com/Cocominap/items/93f9f9b8806f9ddaa513
Choregrapheをインストール
http://qiita.com/naoqi/items/c9f9a62cbcfcffab870e
基本NAOと同じなので(Pepperには足がないですが)NAOのチュートリアが参考になる。
YouTubeにもいくつかアップされている。
http://www.youtube.com/results?search_query=Choregraphe+NAO

Choregrapheにも動作のみのシミュレーション機能はあるが
Webots for NAOをインストールすれば、実機がなくても
重力のあるバーチャル世界の中で物や障害物を置いて
NAOを動かして楽しむことができる。
https://community.aldebaran-robotics.com/doc/2-1/software/webots/webots_index.html
※これもユーザ登録で90日間無償体験あり。
基本マウスで線を引いてパズルのように部品を組み合わせて
開発してゆくのでコツさえつかめば誰にでもできる。
この開発環境のソフトウェア開発キットSDK(Choregraphe 2.1)の使いやすさが
魅力のひとつでもある!
チェックポイント アルデバラン・アトリエ秋葉原 with SoftBankでは
定期的に開発者向けのイベントやセミナーを開催中だ!
アルデバラン・アトリエ秋葉原 with SoftBank
http://pepper.doorkeeper.jp/
ということで実際に参加してみた。
■Pepper開発体験 ワークショップの様子
Pepperの概要
SDKの概要
アプリ開発トライアル
・Say と アニメーションを使ってみよう(TimeLine)
・条件分岐とセンサー(タッチ/音声認識)を使ってアプリを作ろう
・アプリ開発実習(グループ発表)
資料:http://www.slideshare.net/Atelier-Akihabara/20140921-v10


Pepperがたくさんいる!基本的な操作や説明がメイン。ポイントごとに実習タイム。
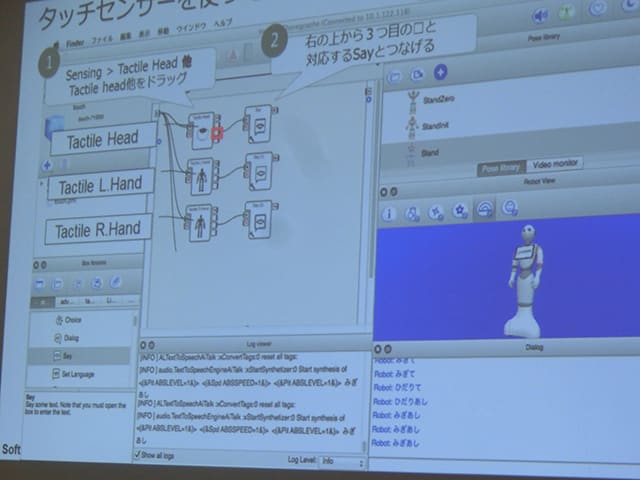
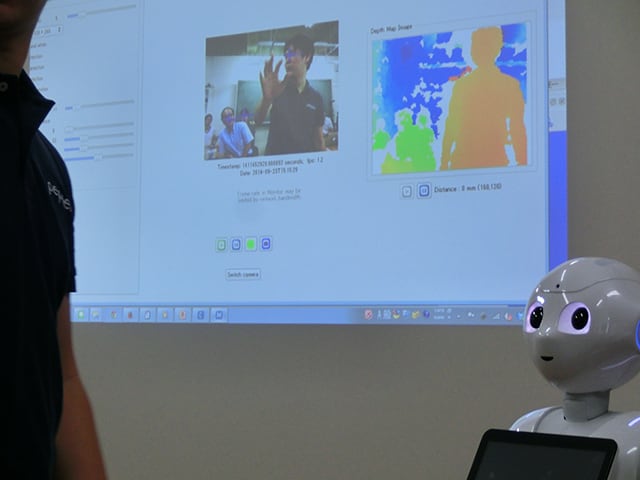

グループごとに実際にアプリ開発をしながらPepperを動かすことができるよ。
あんなポーズやこんなポーズ、ボケとツッコミとか面白い。アイデア次第!



Pepperの手のひらがネコの肉球みたいに
ぷにぷに感で触り心地がいい。NAOにも会えるよ!
※今のところ毎回満員御礼だけどキャンセル待ちもできるので
最寄りの方は根気よく待ってみるのもいいと思う。
(私も開始2時間前にキャンセルがあって参加できた)
○アプリ開発の参考になるサイト
アルデバラン・アトリエ秋葉原 with SoftBank (公式)
http://qiita.com/Atelier-Akihabara
資料共有:https://github.com/Atelier-Akihabara
共有タグ:http://qiita.com/tags/pepper
技術セッション(基本)資料
http://www.slideshare.net/Atelier-Akihabara/pepper-tech-festival2014
技術セッション(応用)資料
http://www.slideshare.net/Atelier-Akihabara/pepper-tech-festival2014-39468311
開発体験ワークショップ(2014/09/21)資料
http://www.slideshare.net/Atelier-Akihabara/20140921-v10
Cocominapさん(Qiita)
http://qiita.com/Cocominap
naoqiさん(Qiita)
http://qiita.com/naoqi
bestcrmさん(Qiita)
http://qiita.com/bestcrm
haiattoCさん(Qiita)
http://qiita.com/haiattoC
《自分メモ》てーへんからの脱却《エンジニア》
http://eriricca.blog.fc2.com/
Aldebaran Robotics NAO とそのほかロボットについて
http://tkawata.hatenablog.com/
上智大学ロボット研究会
http://robo.genv.sophia.ac.jp/wp_robot/?cat=3
ロボスクエア ヒューマノイド工房の作業日誌
http://blog.livedoor.jp/robosquare_human/archives/cat_165795.html
神奈川大学内田研究室(ロボット研究論文)
http://www.info.kanagawa-u.ac.jp/~uchida/html/sotsuken.html
株式会社アライト Developer Blog
http://arit-clt.com/category/blog/
※随時追加予定
 ブログ内関連記事
ブログ内関連記事3Dプリンターの次はコミュニケーション人型ロボットの波が来る!
http://blog.goo.ne.jp/t2com1230/e/12605be7ef5b30f843cbfb67d2637bd5
人型ロボットPepperでロボット分野にもパーソナル・ファブリケーションの波が到来!!
http://blog.goo.ne.jp/t2com1230/e/9dc3246cfd8cfaf13223faf3859ba1c7
※Fusion 360の購入はこちらから。






 新着!
Fusion 360を活用したものづくりのための最新プリンター「Raise3D」神原友徳の使用感レポート
新着!
Fusion 360を活用したものづくりのための最新プリンター「Raise3D」神原友徳の使用感レポート

 「無料」から使える3Dモデリングツール「Fusion 360」とは? DIYでオリジナルのライフハックツールをつくろう!
「無料」から使える3Dモデリングツール「Fusion 360」とは? DIYでオリジナルのライフハックツールをつくろう!















 3DワークスAI体験セミナー
3DワークスAI体験セミナー Fusion 360 3DCADセミナー
Fusion 360 3DCADセミナー Fusion 360 CNCセミナー
Fusion 360 CNCセミナー








※コメント投稿者のブログIDはブログ作成者のみに通知されます