









NASAの超圧力気球からパラシュート経由でダウンロードされたデータ
要約: 2023 年 4月から 5月にかけて、SUPERBIT 望遠鏡は地球の成層圏まで持ち上げられました。
ヘリウムを充填した超圧力気球。上空 (99.5%) から天体画像を取得します。
地球の大気。 ニュージーランドから打ち上げられ、40日間かけて地球を一周した
南緯40度から50度で5回。 望遠鏡には4つの「DRS」が取り付けられていました(データ
Recovery System) カプセルには 5 TB ソリッド ステート データ ストレージと GNSS 受信機、イリジウムが含まれています
送信機とパラシュート。 望遠鏡からのデータがこれらにコピーされ、2 つがドロップされました
アルゼンチン上空。 彼らは32km下降しながら61km水平に漂流したが、我々は予測した
2.4 km 以内の降下ベクトル: この位置では、以下では矛盾が軽減できないように見えます。
高速、強風、地元の地形のため、約 2 km。 その後、カプセルは次のことを報告しました。
自分の位置を数メートル以内に設定できます。 カプセルを回収し、すべてを回収することに成功しました。
SUPERBIT のデータ - 望遠鏡自体は後に着陸時に破壊されたにもかかわらず。
キーワード: 気球計装。 データ処理; データ圧縮。 モデルとシミュレーション。
大型の検出器システムのパフォーマンス
1. はじめに
超圧力気球搭載撮像望遠鏡 [SUPERBIT; 1,2] に引き上げられました
NASA の 1,880 万立方フィートの超圧力気球 728NT1により高度 33km まで到達。 そうだった
2023年4月16日にニュージーランドのワナカから打ち上げられ、季節船によって東に運ばれました。
極渦風[3]、地球を約5.5周してアルゼンチンに上陸
この飛行中に、望遠鏡は深光学と近紫外線を取得しました。
銀河団やその他の天体の画像化 [4-6]。 ミッション初期のデータ
スターリンクおよび TDRSS 衛星通信リンクを介して地上局に送信されました。
ただし、Starlink 接続は 2023年 5月 1日に失われ、TDRSS が不安定になりました。
各障害の根本原因は現在調査中です。 すべての
データはボード上に保存されるだけでなく、ドロップ内のソリッド ステート ドライブの冗長セットにも保存されました。
パッケージ。 終了前に完全なデータセットのいくつかのコピーがパラシュートで放出された
飛行中に墜落し、無事に回収されました。 SUPERBIT ペイロードは完全に破壊されました
この場合、データは最終的には残骸から回収されましたが、
オンボードドライブ、パラシュートを使用してデータを安全に回復できることが証明されました
貴重な。
4 つのデータ回復システム (DRS) カプセルが以前に望遠鏡に取り付けられていました。
打ち上げ。 パラシュートだけでなく、それぞれに 5 TB のソリッド ステート データ ストレージ、グローバル
ナビゲーション衛星システム (GNSS) 受信機により位置を特定できるようになり、イリジウムも
ショートバースト データ (SBD) トランシーバー。その位置を復旧チームに報告できるようにするため、
ブザーをオンまたはオフにするなどのコマンドを受信します7]。 2 つの DRS がリリースされ、両方とも
データはそのままで、正常に復元されました。
この記事では、アップグレード (SUPERBIT 中の DRS の最初のテスト以降) について説明します。
2019 年のエンジニアリング飛行)から放出メカニズム、望遠鏡との通信、
そして熱制御。 運用中のハードウェアのパフォーマンスについて説明します。
また、適切な軌道を予測するために使用するソフトウェアのパフォーマンスも影響します。 正確な
降下ベクトルの予測は、安全な着陸ゾーンを選択するために不可欠です。 どちらでもない
望遠鏡のメインペイロードやパラシュートの軌道はアクティブに制御されますが、
リリースのタイミングは、DRS が人口の少ないエリアに着陸するように選択できます。
安全ですが、回復を容易にするために道路の近くにあります。
当社のハードウェア設計 2 とソフトウェア 3 は両方ともオープンソースです。 彼らの成功がインスピレーションを与えた
NASAの「FLOATing DRAGON」気球チャレンジ4
。 このプログラムに続いて、同様の
データまたは小さな物理サンプルをダウンロードする機能は、NASA によって利用可能になります。
将来のすべての超圧力気球チームは、通信の喪失、情報の喪失を防ぐために、
ペイロード、または着陸時のペイロードの破壊。 私たちの経験から、チームは次のことを行う必要があります。
申し出を受け入れてください。

図 1. DRS は、中央に Raspberry Pi を備えたこのカスタム PCB をベースにしています。 イーサネット
ケーブルは Pi の右下に差し込まれ、抜き差し力ゼロのコネクタに接続されます。
PCB の右上隅。 2 つの SD カード リーダーが Pi に直接接続されており、2 つは
USB 延長ケーブルに取り付けて、ソケットでの発熱を軽減します。 サーボ式ペンチ
右側にメカニズムが見えます。正面のピンサーがメインゴンドラを保持しています。
そしてパラシュートを保持している後部のリリース。

図 2. DRS カプセルはペイロードの下にぶら下がっています (ここでは左に示されています)。 彼らです
上部に固定された 3D プリントの「アライメント クラウン」によって、揺れや回転が防止されます。
逆さ形状のゴンドラのマウント内に収まります。

図 3. 室内でのテスト中の Raspberry Pi の上部と下部の熱画像
温度実験室。 熱放射は温度 (赤、白、緑の数字) として解釈されます。
放射率 e = 0.95 と仮定します。 (a) メイン CPU は、単純なコマンドの実行中に最もホットなコンポーネントです。
Python スクリプト。 この画像の USB ソケットには何も接続されていません。 (b) 取り付けられたPiの下面
図 1 のような向きで DRS に取り付けます。ヒートシンクとオペレーティング システムが入っている SD カードは、
上部は冷えていますが、小型リーダーで SD カードにファイルを転送している間、USB ソケットが熱くなります。
USBソケットに取り付けます。

図 4. SUPERBIT 中の各 DRS 上の Raspberry Pi の自己報告された CPU 温度
ミッション、DRS1 (赤)、DRS2 (青)、DRS5 (緑)。 温度は主に環境によって変化します。
40 日間で 45 日周(SUPERBIT は日付変更線を 5 回通過)、その長さと
その範囲はSUPERBITの速度と緯度によって異なります。 右側のヒストグラムが分割されています
正または負の太陽高度による倍数。 挿入図は、増加に伴う温度変化を示しています。
時間解像度 — 例として、DRS1 の電源がオンのままになったときの 1 回の場合を含む
30分間。 温度測定は、DRS の電源が入っている場合にのみ利用可能でした。
水平線は単に最後に報告された温度を示しています。

図 5. (a) 飛行中の DRS 構成の拡大図。 独立気泡フォームシェルが周囲を取り囲んでいます。
DRS がアルミメッキされたマイラーのスカートの下に突き出ているのが見えます。 さらに両面で保護されています
発泡断熱材のシートもアルミニウム処理されたマイラーで覆われています。 ケーブルは上向きに配線されます。
取り付けフレーム。 (b) 発射クレーンに吊り下げられたスーパービット。 4 つの DRS カプセルが次の場所に表示されます。
それぞれの底部は、ソーラーパネルを保持するフレームの隅に取り付けられています。 青と白の物体
それらの間にはバラストホッパーがぶら下がっています。 その使命の間中、望遠鏡は背を向け続けます。
これらの写真の右側)は太陽の方向を向いています。
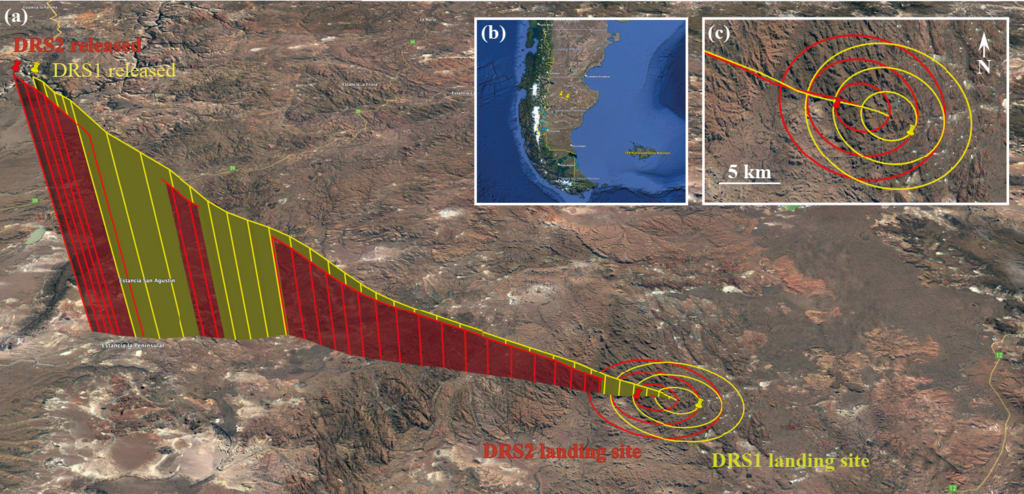
図 6. 放出された DRS1 (黄色) および DRS2 (赤色) カプセルの降下軌跡
2023 年 5 月 25 日のアルゼンチン南部。ピンは既知の放出位置と着陸位置を示しています。 すべて
else は pyBalloon ソフトウェア [9] を使用してモデル化されます。 (a) 高度から北を見た眺め。 予測された
水平方向に 62 km、垂直方向に 32 km にわたる降下軌道が縦線で示されています。
最初の 1 分間は 15 秒ごと、その後は 1 分ごと。 (b) アルゼンチン内の軌道の位置。
(c) 拡大された地図ビュー。実際の着陸地点と予測された 1σ、2σ、および 3σ の不確実性を比較
楕円。 背景画像は、SIO、NOAA、米国のデータを使用して Google Earth で作成されました。
海軍、NGA、GEBCO、および Landsat/Copernicus からの画像。

図 7. アルゼンチンにおける DRS カプセルの着陸地点。 (a) 一般的な地形と探索および
サンタクルス州知事室の救助チーム。 鮮やかなオレンジ色のパラシュートは、
DRS1 (b) と DRS2 (c) は遠くからでも見えました。 ホワイトフォームシェルとリリースクラウンがついに完成
も見える。 このフォームは、DRS2 が雪に着地したときに断熱性と防水性を発揮しました。
4. 結果
DRS システムはハードウェアとソフトウェアの両方で構成されます。 ハードウェアは確実に動作しました
ミッション中は 4 つのカプセルのうち 3 つで行われます。 毎回電源が入れ直されました
40 日間 15 分間、毎回正常に起動しました。 データは徐々にコピーされました
すべての DRS を取得時とその後(高地での平均 20 日の遅延後)
アルゼンチンで 2 日間暴露された)219 GB のファイルがビット エラーなしで回復されました。 不思議なことに、
5920 ファイルのうちの 1 つは、望遠鏡からコピーされたときに 10 ビット エラーが蓄積されました
カメラ データ ストアを中央データ ストアに転送しましたが、どちらのデータ ストアでもさらに破損したものはありませんでした。
中央データ ストアまたは DRS カプセル。
DRS カプセルの内蔵バッテリーは高地では非常に冷えるため、
着陸後にウォームアップするまでイリジウムトランシーバーに電力を供給するには電圧が不十分です。
これは、本当の降下軌道が記録されていないことを意味します。
モデルの軌跡と比較すると興味深いです。 ただし、バッテリーは暖かくなり、
地球上の露出した高高度の場所からでも、覆われている間でも正常に動作しました。
雪。 カプセルは位置を報告し、発見されました。
4 つの DRS カプセルのうち 1 つが発射後に応答しませんでした。 破壊に続いて
取り付けたままの望遠鏡が故障したため、原因を特定することはできません。 私たちは
打ち上げの衝撃でケーブルかコネクタが外れたのではないかと推測されますが、
また、問題の DRS では、不安定な表示があったブランドの SD カードが使用されていたことにも注意してください。
テスト中の動作。 いずれにせよ、ハードウェアの信頼性は 75% のみであり、追加の必要があります。
将来使用する前にテストして、単一障害点を軽減または改善します。
DRSが降下する軌道を予測するために開発したソフトウェア
地球の大気は非常にうまく機能し、正確な予測と推定が行われました。
不確実性。 これは、DRS を安全かつアクセス可能な着陸地点に投下するために不可欠です。 そうなるだろう
また、リリース後に応答しなかった DRS を見つけるためのバックアップ情報としても機能します (ただし、
起動時以外のハードウェアの信頼性を考慮すると、これは必要ありませんでした)。
SUPERBITとDRSカプセルで収集した天文データの解析は、
今後の論文で発表されます。
5. ディスカッション
ライブサイエンスミッションでの DRS カプセルの最初の使用は大成功でした。
比較的少額のコストで、SUPERBIT の科学的利益を損失に対して保険をかけました。
現実となったイベント: 高帯域幅の通信リンクに障害が発生し、望遠鏡は停止しました。
着陸時に破壊される。 今後の気球ミッションではこれの使用を検討することをお勧めします。
または同様のシステム。 当社のハードウェア設計とソフトウェアはオープンソースであり、無料で入手できます。
NASA ではさらなる開発が続けられており、施設クラスの DRS システムを提供する計画があります。
DRS ハードウェアの改善の可能性としては、低摩擦 (より適切な固定方法) が挙げられます。
起動中にコネクタが外れることがないようにします。 DRS が落ちたときの衝撃
標準的なイーサネットによって適切な量の剛性が提供されるには、離れているだけで十分です。
保持ラグを取り外したソケットとプラグ。 Power Over Ethernet が削除される可能性があります。
別途電源ケーブルが必要になります。 これに関連する側面は、DRS を
現在、ゴンドラマウントでは、狭いゴンドラ内でケーブルとケーブルタイを面倒な配線する必要があります。
ケースを外し、タイをピンと張ります (図 2 を参照)。 組み立て/分解がより便利になります
私たちが達成したよりもはるかに多くのテストドロップをその場で簡単に実行できるようになりました。
2019 年のテスト飛行 [9] 以来、熱管理は大幅に改善されました。
Raspberry Pi は、ミッション全体を通じてオンデマンドで確実に動作します。 内蔵バッテリー
寒くなってきたら、Pi からの (スロットルされた) サーマル リンクが、作業の準備を整えるのに役立ちます。
発売直後。 最終的にバッテリーは暖まり、正常に動作しましたが、
40日間風邪をひいた後、同じくらい早く回復するかどうかはテストしていません。
寒い100日。 DRS が GNSS データを (高解像度で) 保存していれば興味深いことになるでしょう。
降下中、寒すぎてイリジウム送信機に電力を供給できなかったにもかかわらず、
したがって、その軌跡を私たちの予測と比較することができます。 現状ではそれは不可能です
設計コンセプトは、意図的に低電力マイクロコントローラーチップのみを搭載し、
リリース後にフラッシュ メモリが利用可能になりました - 検索する場合のバッテリ寿命を最大限に高めるためDRS には時間がかかります。
要約: 2023 年 4月から 5月にかけて、SUPERBIT 望遠鏡は地球の成層圏まで持ち上げられました。
ヘリウムを充填した超圧力気球。上空 (99.5%) から天体画像を取得します。
地球の大気。 ニュージーランドから打ち上げられ、40日間かけて地球を一周した
南緯40度から50度で5回。 望遠鏡には4つの「DRS」が取り付けられていました(データ
Recovery System) カプセルには 5 TB ソリッド ステート データ ストレージと GNSS 受信機、イリジウムが含まれています
送信機とパラシュート。 望遠鏡からのデータがこれらにコピーされ、2 つがドロップされました
アルゼンチン上空。 彼らは32km下降しながら61km水平に漂流したが、我々は予測した
2.4 km 以内の降下ベクトル: この位置では、以下では矛盾が軽減できないように見えます。
高速、強風、地元の地形のため、約 2 km。 その後、カプセルは次のことを報告しました。
自分の位置を数メートル以内に設定できます。 カプセルを回収し、すべてを回収することに成功しました。
SUPERBIT のデータ - 望遠鏡自体は後に着陸時に破壊されたにもかかわらず。
キーワード: 気球計装。 データ処理; データ圧縮。 モデルとシミュレーション。
大型の検出器システムのパフォーマンス
1. はじめに
超圧力気球搭載撮像望遠鏡 [SUPERBIT; 1,2] に引き上げられました
NASA の 1,880 万立方フィートの超圧力気球 728NT1により高度 33km まで到達。 そうだった
2023年4月16日にニュージーランドのワナカから打ち上げられ、季節船によって東に運ばれました。
極渦風[3]、地球を約5.5周してアルゼンチンに上陸
この飛行中に、望遠鏡は深光学と近紫外線を取得しました。
銀河団やその他の天体の画像化 [4-6]。 ミッション初期のデータ
スターリンクおよび TDRSS 衛星通信リンクを介して地上局に送信されました。
ただし、Starlink 接続は 2023年 5月 1日に失われ、TDRSS が不安定になりました。
各障害の根本原因は現在調査中です。 すべての
データはボード上に保存されるだけでなく、ドロップ内のソリッド ステート ドライブの冗長セットにも保存されました。
パッケージ。 終了前に完全なデータセットのいくつかのコピーがパラシュートで放出された
飛行中に墜落し、無事に回収されました。 SUPERBIT ペイロードは完全に破壊されました
この場合、データは最終的には残骸から回収されましたが、
オンボードドライブ、パラシュートを使用してデータを安全に回復できることが証明されました
貴重な。
4 つのデータ回復システム (DRS) カプセルが以前に望遠鏡に取り付けられていました。
打ち上げ。 パラシュートだけでなく、それぞれに 5 TB のソリッド ステート データ ストレージ、グローバル
ナビゲーション衛星システム (GNSS) 受信機により位置を特定できるようになり、イリジウムも
ショートバースト データ (SBD) トランシーバー。その位置を復旧チームに報告できるようにするため、
ブザーをオンまたはオフにするなどのコマンドを受信します7]。 2 つの DRS がリリースされ、両方とも
データはそのままで、正常に復元されました。
この記事では、アップグレード (SUPERBIT 中の DRS の最初のテスト以降) について説明します。
2019 年のエンジニアリング飛行)から放出メカニズム、望遠鏡との通信、
そして熱制御。 運用中のハードウェアのパフォーマンスについて説明します。
また、適切な軌道を予測するために使用するソフトウェアのパフォーマンスも影響します。 正確な
降下ベクトルの予測は、安全な着陸ゾーンを選択するために不可欠です。 どちらでもない
望遠鏡のメインペイロードやパラシュートの軌道はアクティブに制御されますが、
リリースのタイミングは、DRS が人口の少ないエリアに着陸するように選択できます。
安全ですが、回復を容易にするために道路の近くにあります。
当社のハードウェア設計 2 とソフトウェア 3 は両方ともオープンソースです。 彼らの成功がインスピレーションを与えた
NASAの「FLOATing DRAGON」気球チャレンジ4
。 このプログラムに続いて、同様の
データまたは小さな物理サンプルをダウンロードする機能は、NASA によって利用可能になります。
将来のすべての超圧力気球チームは、通信の喪失、情報の喪失を防ぐために、
ペイロード、または着陸時のペイロードの破壊。 私たちの経験から、チームは次のことを行う必要があります。
申し出を受け入れてください。
図 1. DRS は、中央に Raspberry Pi を備えたこのカスタム PCB をベースにしています。 イーサネット
ケーブルは Pi の右下に差し込まれ、抜き差し力ゼロのコネクタに接続されます。
PCB の右上隅。 2 つの SD カード リーダーが Pi に直接接続されており、2 つは
USB 延長ケーブルに取り付けて、ソケットでの発熱を軽減します。 サーボ式ペンチ
右側にメカニズムが見えます。正面のピンサーがメインゴンドラを保持しています。
そしてパラシュートを保持している後部のリリース。
図 2. DRS カプセルはペイロードの下にぶら下がっています (ここでは左に示されています)。 彼らです
上部に固定された 3D プリントの「アライメント クラウン」によって、揺れや回転が防止されます。
逆さ形状のゴンドラのマウント内に収まります。
図 3. 室内でのテスト中の Raspberry Pi の上部と下部の熱画像
温度実験室。 熱放射は温度 (赤、白、緑の数字) として解釈されます。
放射率 e = 0.95 と仮定します。 (a) メイン CPU は、単純なコマンドの実行中に最もホットなコンポーネントです。
Python スクリプト。 この画像の USB ソケットには何も接続されていません。 (b) 取り付けられたPiの下面
図 1 のような向きで DRS に取り付けます。ヒートシンクとオペレーティング システムが入っている SD カードは、
上部は冷えていますが、小型リーダーで SD カードにファイルを転送している間、USB ソケットが熱くなります。
USBソケットに取り付けます。
図 4. SUPERBIT 中の各 DRS 上の Raspberry Pi の自己報告された CPU 温度
ミッション、DRS1 (赤)、DRS2 (青)、DRS5 (緑)。 温度は主に環境によって変化します。
40 日間で 45 日周(SUPERBIT は日付変更線を 5 回通過)、その長さと
その範囲はSUPERBITの速度と緯度によって異なります。 右側のヒストグラムが分割されています
正または負の太陽高度による倍数。 挿入図は、増加に伴う温度変化を示しています。
時間解像度 — 例として、DRS1 の電源がオンのままになったときの 1 回の場合を含む
30分間。 温度測定は、DRS の電源が入っている場合にのみ利用可能でした。
水平線は単に最後に報告された温度を示しています。
図 5. (a) 飛行中の DRS 構成の拡大図。 独立気泡フォームシェルが周囲を取り囲んでいます。
DRS がアルミメッキされたマイラーのスカートの下に突き出ているのが見えます。 さらに両面で保護されています
発泡断熱材のシートもアルミニウム処理されたマイラーで覆われています。 ケーブルは上向きに配線されます。
取り付けフレーム。 (b) 発射クレーンに吊り下げられたスーパービット。 4 つの DRS カプセルが次の場所に表示されます。
それぞれの底部は、ソーラーパネルを保持するフレームの隅に取り付けられています。 青と白の物体
それらの間にはバラストホッパーがぶら下がっています。 その使命の間中、望遠鏡は背を向け続けます。
これらの写真の右側)は太陽の方向を向いています。
図 6. 放出された DRS1 (黄色) および DRS2 (赤色) カプセルの降下軌跡
2023 年 5 月 25 日のアルゼンチン南部。ピンは既知の放出位置と着陸位置を示しています。 すべて
else は pyBalloon ソフトウェア [9] を使用してモデル化されます。 (a) 高度から北を見た眺め。 予測された
水平方向に 62 km、垂直方向に 32 km にわたる降下軌道が縦線で示されています。
最初の 1 分間は 15 秒ごと、その後は 1 分ごと。 (b) アルゼンチン内の軌道の位置。
(c) 拡大された地図ビュー。実際の着陸地点と予測された 1σ、2σ、および 3σ の不確実性を比較
楕円。 背景画像は、SIO、NOAA、米国のデータを使用して Google Earth で作成されました。
海軍、NGA、GEBCO、および Landsat/Copernicus からの画像。
図 7. アルゼンチンにおける DRS カプセルの着陸地点。 (a) 一般的な地形と探索および
サンタクルス州知事室の救助チーム。 鮮やかなオレンジ色のパラシュートは、
DRS1 (b) と DRS2 (c) は遠くからでも見えました。 ホワイトフォームシェルとリリースクラウンがついに完成
も見える。 このフォームは、DRS2 が雪に着地したときに断熱性と防水性を発揮しました。
4. 結果
DRS システムはハードウェアとソフトウェアの両方で構成されます。 ハードウェアは確実に動作しました
ミッション中は 4 つのカプセルのうち 3 つで行われます。 毎回電源が入れ直されました
40 日間 15 分間、毎回正常に起動しました。 データは徐々にコピーされました
すべての DRS を取得時とその後(高地での平均 20 日の遅延後)
アルゼンチンで 2 日間暴露された)219 GB のファイルがビット エラーなしで回復されました。 不思議なことに、
5920 ファイルのうちの 1 つは、望遠鏡からコピーされたときに 10 ビット エラーが蓄積されました
カメラ データ ストアを中央データ ストアに転送しましたが、どちらのデータ ストアでもさらに破損したものはありませんでした。
中央データ ストアまたは DRS カプセル。
DRS カプセルの内蔵バッテリーは高地では非常に冷えるため、
着陸後にウォームアップするまでイリジウムトランシーバーに電力を供給するには電圧が不十分です。
これは、本当の降下軌道が記録されていないことを意味します。
モデルの軌跡と比較すると興味深いです。 ただし、バッテリーは暖かくなり、
地球上の露出した高高度の場所からでも、覆われている間でも正常に動作しました。
雪。 カプセルは位置を報告し、発見されました。
4 つの DRS カプセルのうち 1 つが発射後に応答しませんでした。 破壊に続いて
取り付けたままの望遠鏡が故障したため、原因を特定することはできません。 私たちは
打ち上げの衝撃でケーブルかコネクタが外れたのではないかと推測されますが、
また、問題の DRS では、不安定な表示があったブランドの SD カードが使用されていたことにも注意してください。
テスト中の動作。 いずれにせよ、ハードウェアの信頼性は 75% のみであり、追加の必要があります。
将来使用する前にテストして、単一障害点を軽減または改善します。
DRSが降下する軌道を予測するために開発したソフトウェア
地球の大気は非常にうまく機能し、正確な予測と推定が行われました。
不確実性。 これは、DRS を安全かつアクセス可能な着陸地点に投下するために不可欠です。 そうなるだろう
また、リリース後に応答しなかった DRS を見つけるためのバックアップ情報としても機能します (ただし、
起動時以外のハードウェアの信頼性を考慮すると、これは必要ありませんでした)。
SUPERBITとDRSカプセルで収集した天文データの解析は、
今後の論文で発表されます。
5. ディスカッション
ライブサイエンスミッションでの DRS カプセルの最初の使用は大成功でした。
比較的少額のコストで、SUPERBIT の科学的利益を損失に対して保険をかけました。
現実となったイベント: 高帯域幅の通信リンクに障害が発生し、望遠鏡は停止しました。
着陸時に破壊される。 今後の気球ミッションではこれの使用を検討することをお勧めします。
または同様のシステム。 当社のハードウェア設計とソフトウェアはオープンソースであり、無料で入手できます。
NASA ではさらなる開発が続けられており、施設クラスの DRS システムを提供する計画があります。
DRS ハードウェアの改善の可能性としては、低摩擦 (より適切な固定方法) が挙げられます。
起動中にコネクタが外れることがないようにします。 DRS が落ちたときの衝撃
標準的なイーサネットによって適切な量の剛性が提供されるには、離れているだけで十分です。
保持ラグを取り外したソケットとプラグ。 Power Over Ethernet が削除される可能性があります。
別途電源ケーブルが必要になります。 これに関連する側面は、DRS を
現在、ゴンドラマウントでは、狭いゴンドラ内でケーブルとケーブルタイを面倒な配線する必要があります。
ケースを外し、タイをピンと張ります (図 2 を参照)。 組み立て/分解がより便利になります
私たちが達成したよりもはるかに多くのテストドロップをその場で簡単に実行できるようになりました。
2019 年のテスト飛行 [9] 以来、熱管理は大幅に改善されました。
Raspberry Pi は、ミッション全体を通じてオンデマンドで確実に動作します。 内蔵バッテリー
寒くなってきたら、Pi からの (スロットルされた) サーマル リンクが、作業の準備を整えるのに役立ちます。
発売直後。 最終的にバッテリーは暖まり、正常に動作しましたが、
40日間風邪をひいた後、同じくらい早く回復するかどうかはテストしていません。
寒い100日。 DRS が GNSS データを (高解像度で) 保存していれば興味深いことになるでしょう。
降下中、寒すぎてイリジウム送信機に電力を供給できなかったにもかかわらず、
したがって、その軌跡を私たちの予測と比較することができます。 現状ではそれは不可能です
設計コンセプトは、意図的に低電力マイクロコントローラーチップのみを搭載し、
リリース後にフラッシュ メモリが利用可能になりました - 検索する場合のバッテリ寿命を最大限に高めるためDRS には時間がかかります。










※コメント投稿者のブログIDはブログ作成者のみに通知されます