Scilab 17
前回、
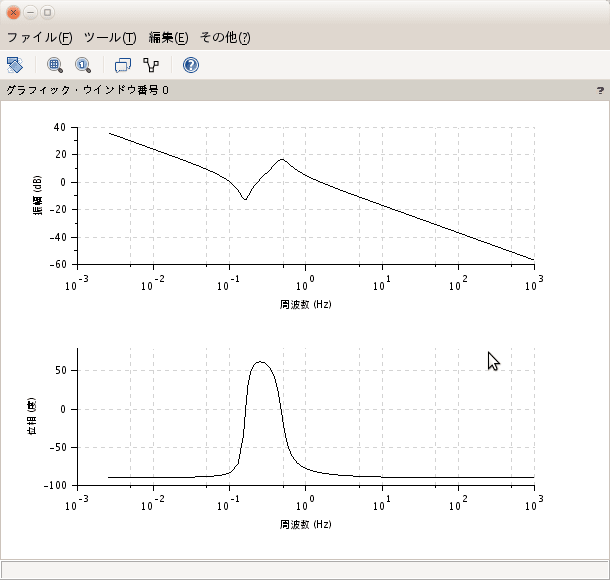
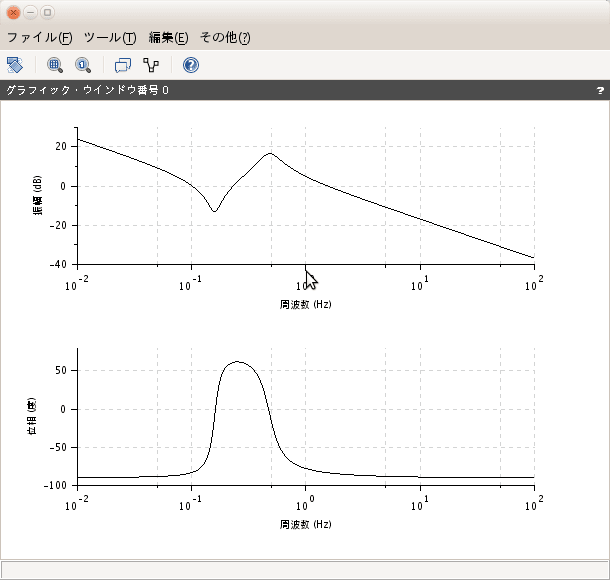
位相進み補償器をやったので、今回は
位相遅れ補償器、位相遅れ進み補償器
というものを取り扱うことを考えましたが、scilabの使い方に関しては同じなので
割愛いたします。
では、今回は「状態空間表現」に基づいた制御系設計に入ります。 <尾形先生の第6章>
まず、可制御性と可観測性です。
1)可制御性
可制御性は、状態空間表現で与えられたシステム
dx/dt = Ax+Bu
に対して(n次)
可制御行列
[B:AB:….:A^n-1B]
のランクを調べることで確認できる。ランクがnであれば可制御である。
2)可観測性
[C:CA:….:CA^n-1]t
がランクnであれば可観測である。
これらをscilabで調べてみよう。
->A=[0 1 0;0 0 1;-6 -11 -6];
-->B=[0;0;1];
-->C=[5 6 1];
-->D=[0];
-->n=contr(A,B)
n =
3.
なので 可観測
-->m=unobs(A,C)
m =
1.
なので、1つの次元が不可観測であることがわかる。
前回、
位相進み補償器をやったので、今回は
位相遅れ補償器、位相遅れ進み補償器
というものを取り扱うことを考えましたが、scilabの使い方に関しては同じなので
割愛いたします。
では、今回は「状態空間表現」に基づいた制御系設計に入ります。 <尾形先生の第6章>
 | 制御のためのMATLAB |
| 石川 潤 訳 | |
| 東京電機大学出版局 |
まず、可制御性と可観測性です。
1)可制御性
可制御性は、状態空間表現で与えられたシステム
dx/dt = Ax+Bu
に対して(n次)
可制御行列
[B:AB:….:A^n-1B]
のランクを調べることで確認できる。ランクがnであれば可制御である。
2)可観測性
[C:CA:….:CA^n-1]t
がランクnであれば可観測である。
これらをscilabで調べてみよう。
->A=[0 1 0;0 0 1;-6 -11 -6];
-->B=[0;0;1];
-->C=[5 6 1];
-->D=[0];
-->n=contr(A,B)
n =
3.
なので 可観測
-->m=unobs(A,C)
m =
1.
なので、1つの次元が不可観測であることがわかる。