








オールトの雲彗星を観測する為にSLSで打上げるほど予算が付くのか?ニューホライズンズと同様の編成でいいような気がする。以下、機械翻訳。
オールト雲彗星 C/2014 UN271 への低 ∆V 宇宙船ミッションの分析
2022年 10月 11日提出
概要
彗星 C/2014 UN271、その発見者である Bernardinelli–Bernstein にちなんで BB の代替名称、および
一般的に UN271 と呼ばれ、2 つの面で極端なケースです。まず、発見時の太陽距離です。
(> 29 au) と第二にその核のサイズ (137±15 km)。遠日点距離は約33,000au (太陽系の重心) と軌道周期が約 200 万年であることから、これは間違いなく
太陽系の「オールトの雲」からの天体であり、かなり大きなオールトの雲天体でもあります。
観察したことがあります。 UN271 の現場観察は、かなり科学的に重要である。ようではない
ほとんどのオールト雲彗星は、内側に近づいたときに初めて発見されました。
太陽系では、UN271 が早期に発見され、計画に十分な事前警告を提供することができました。
そのような使命。この論文では、期間中にUN271に到達するためのさまざまな方法について説明します
フライバイとランデブーの両方のオプションを備えた、近日点と黄道面の通過の周り。搾取する
直接転送、ジュピター駆動の重力アシスト (GA)、または代わりに内側の一連の GA
惑星。特にNASA Space Launchを使用して、実行可能なフライバイとランデブーの軌道が見つかりました
ロケットとしてのシステム(SLS)。
1.はじめに
C/2014 UN271 (Bernardinelli et al. 2022): 知られているオールトの雲天体としては群を抜いて最大で、有効直径は
137±15 km (Lelouch, E. et al. 2022)、UN271 は土星の軌道より近づきません。
2031年の 11.0天文単位と 2033年 8月 7日の黄道の交点、太陽距離 12.0天文単位。という点でも珍しい
近日点のかなり前、太陽から 23.8天文単位の距離で、地表がまだ静かなときに活動を示しました。
寒く、約 5 au の水霜線よりかなり前 (Farnham et al. 2021)。 Bernardinelli らの軌道シミュレーション。
(2021) は、過去に少なくとも 1 回の近日点通過があったことを示唆しており、最後は近日点から 18 天文単位の距離に近づいていました。
太陽。 UN271 へのミッションの主要な科学的問題は、このオールトがどこで、どのように行ったかを決定することです。
クラウドオブジェクトフォーム?
ミッションに関する限り、その場での宇宙船探査はこれらの質問に答えるのに理想的です.
ただし、この彗星は、2029年に打ち上げられる予定の欧州宇宙機関 (ESA) コメット インターセプター宇宙船 (S´anchez et al. 2021) の範囲外です。
2020年代から 30年代にかけて、UN271 へのミッションの数は、近日点通過の時間枠の周りにあり、化学推進に特に注意を払い、非常に高い推力を使用しました。この文脈における「一般的な実現可能性」は、「最小ΔV」に相当します。
ここで行われる分析の目的であり、このパラメーターの正確な定義は以下で明確にされます。
2.方法
通常、宇宙船ミッションの予備設計では、燃料の使用を最小限に抑え、有用性を最大限に高めようとします。
ペイロード質量。この一般的な目的は、実際には特定のミッションごとに詳細に検討する必要があります
それにもかかわらず、さまざまな方法と異なる仮定を採用することにより、一般的な意味で対処することができます。
この研究では、化学ロケットなどの高推力推進法が想定されています。これにより、近似することができます
の離散的な瞬間的な衝動的な変化によって接続された一連の円錐曲線としての宇宙船の軌道
各ノードでの速度 (ΔV ) (したがって、無限かつ瞬間的な推力を想定)。さらに、ノードが惑星の場合、重力アシスト(GA)を使用して、太陽に対して探査機を加速または減速させることができます。
推進剤の必要はありません。この GA の有効性は、宇宙船の近点 - 問題の惑星への最接近。 (近点は受信するように選択されますオーベルト効果からの最大の利益 (Blanco & Mungan 2021).)
各惑星の遭遇の近点と ΔV は、前の惑星の到着速度を仮定することによって計算できます。
円錐曲線とそれに続く円錐曲線の出発速度 (どちらも惑星に関して) は双曲線です。
到着超過速度と出発超過速度。これにより、共通点で接続された 2 つの双曲線の計算が可能になります。
対応する ΔV は、単純に 1 番目から 2 番目に到達するために近点で送達されたものです。
これらはすべて、Optimum Interplanetary として知られる予備的な惑星間ミッション設計ソフトウェアによってモデル化されています。
Trajectory Software (OITS)、Hibberd (2017) を参照。このソフトウェアは、2 つの非線形計画法 (NLP) ソルバーを使用します。
NOMAD (Le Digabel 2011) および MIDACO (Schlueter et al. 2013, 2009)。
OITS の詳細な説明と、モデル化に使用できる「中間点」として知られる機能の解明
V∞ Leveraging Maneuvers (Sims & Longuski 1994) は Hibberd (2022) にあります。上で適用された理論に注意してください
仮定は追加の考慮事項を無視するため、この研究を一般的な実現可能性と軌道設計の考慮事項に限定します。
宇宙船の動きに影響を与える力 (太陽放射圧など)。ただし、これは、
この分析のために訪れた天体、惑星の非常に正確な天体暦、さらに言えばUN271
NASA JPL Horizons サービスを通じて提供され、適切な NASA SPICE カーネルが生成され、利用されました。
OITSによる。 UN271 の場合、カーネル ファイルは 2021年 6月に生成されました。
3. 結果
3.1.フライバイミッション
UN271 へのフライバイ ミッション、つまり、大幅な補正なしに目的地に接近および離脱するミッション
速度を目標に一致させるには、地球からUN271への直接転送または組み合わせを使用することで達成できます
パワードまたはパワードされていないGAの。
3.1.1. 直接転送
このセクションでは、UN271 への直接転送を想定し、双曲線超過速度を最小限に抑えたいと考えています。
地球では、V∞ と指定されます。 一般に、ここで採用された種類の予備的なミッション設計では、タスクは最小化することです
惑星間軌道の何らかの測定基準、通常は ΔV であり、正確な文脈に応じてこれを定義します。 為に
その瞬間、ΔV = V∞ と仮定します。 図 1 は、2 つの独立した直接軌跡のカラー コンター プロットです。
変数 – X 軸は 2020年から 2035年までの打ち上げ日で、Y 軸は全体の飛行時間です。
年。 色が濃く青くなるほど、ΔV は低くなります。 このようなプロットは、ポーク チョップ プロットと呼ばれることがよくあります。
この等高線図では、地球がその軌道上で年間スイート スポットを占めていることから生じる年間パターンを確認できます。
UN271に関しては、その時点で、2つの機関の相対的な連携はミッションにとって特に好都合です.

図 1. UN271 へのフライバイ ミッションの獲得ΔV プロット、右側にカラー バー、単位は km/ s

図 2. 白い領域は、特性エネルギー C3 が実行不可能な場所です

図 3. ジュピター フライバイを使用して UN271 をフライバイするミッションの獲得ΔV プロット
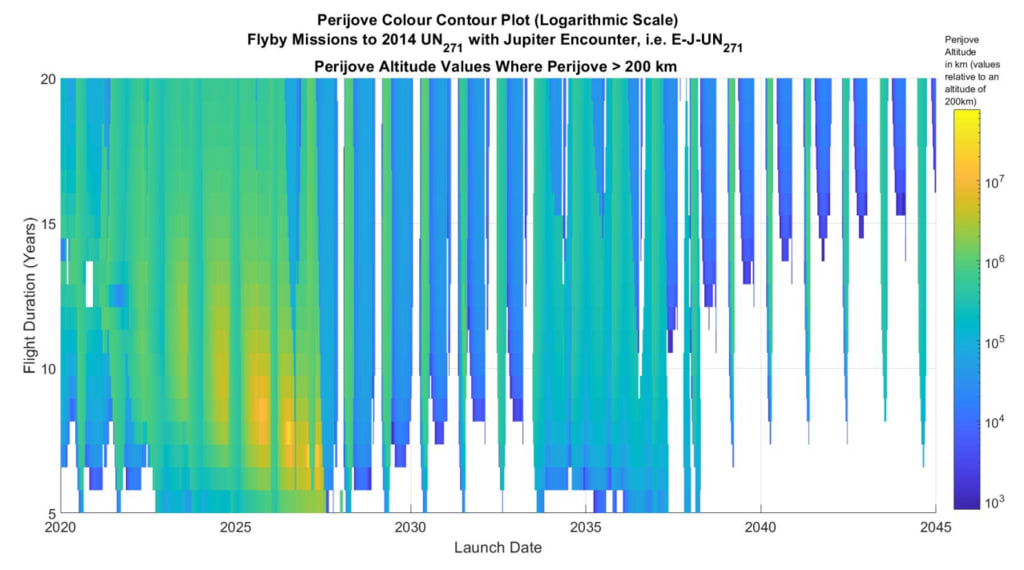
図 4. 近木点高度 200 km の獲得ΔV

図 5. ジュピター フライバイによる UN271 へのミッションの実現可能な ∆V の獲得ΔV プロット

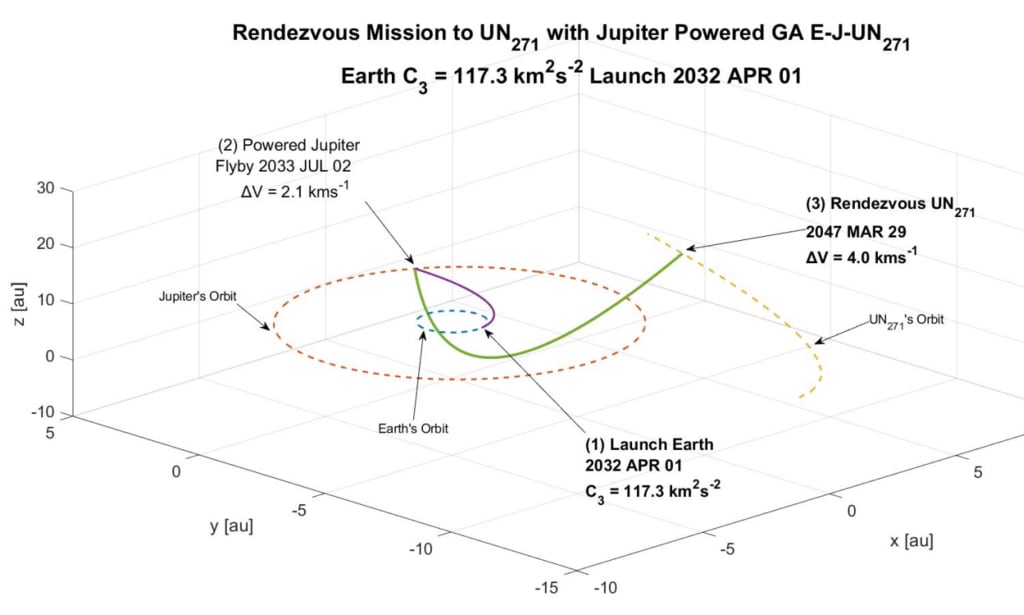
図 6. 木星重力アシスト (GA) を使用した UN271 へのミッションの例
関連記事:検出された最大のオールトの雲天体のサイズとアルベド
オールト雲彗星 C/2014 UN271 への低 ∆V 宇宙船ミッションの分析
2022年 10月 11日提出
概要
彗星 C/2014 UN271、その発見者である Bernardinelli–Bernstein にちなんで BB の代替名称、および
一般的に UN271 と呼ばれ、2 つの面で極端なケースです。まず、発見時の太陽距離です。
(> 29 au) と第二にその核のサイズ (137±15 km)。遠日点距離は約33,000au (太陽系の重心) と軌道周期が約 200 万年であることから、これは間違いなく
太陽系の「オールトの雲」からの天体であり、かなり大きなオールトの雲天体でもあります。
観察したことがあります。 UN271 の現場観察は、かなり科学的に重要である。ようではない
ほとんどのオールト雲彗星は、内側に近づいたときに初めて発見されました。
太陽系では、UN271 が早期に発見され、計画に十分な事前警告を提供することができました。
そのような使命。この論文では、期間中にUN271に到達するためのさまざまな方法について説明します
フライバイとランデブーの両方のオプションを備えた、近日点と黄道面の通過の周り。搾取する
直接転送、ジュピター駆動の重力アシスト (GA)、または代わりに内側の一連の GA
惑星。特にNASA Space Launchを使用して、実行可能なフライバイとランデブーの軌道が見つかりました
ロケットとしてのシステム(SLS)。
1.はじめに
C/2014 UN271 (Bernardinelli et al. 2022): 知られているオールトの雲天体としては群を抜いて最大で、有効直径は
137±15 km (Lelouch, E. et al. 2022)、UN271 は土星の軌道より近づきません。
2031年の 11.0天文単位と 2033年 8月 7日の黄道の交点、太陽距離 12.0天文単位。という点でも珍しい
近日点のかなり前、太陽から 23.8天文単位の距離で、地表がまだ静かなときに活動を示しました。
寒く、約 5 au の水霜線よりかなり前 (Farnham et al. 2021)。 Bernardinelli らの軌道シミュレーション。
(2021) は、過去に少なくとも 1 回の近日点通過があったことを示唆しており、最後は近日点から 18 天文単位の距離に近づいていました。
太陽。 UN271 へのミッションの主要な科学的問題は、このオールトがどこで、どのように行ったかを決定することです。
クラウドオブジェクトフォーム?
ミッションに関する限り、その場での宇宙船探査はこれらの質問に答えるのに理想的です.
ただし、この彗星は、2029年に打ち上げられる予定の欧州宇宙機関 (ESA) コメット インターセプター宇宙船 (S´anchez et al. 2021) の範囲外です。
2020年代から 30年代にかけて、UN271 へのミッションの数は、近日点通過の時間枠の周りにあり、化学推進に特に注意を払い、非常に高い推力を使用しました。この文脈における「一般的な実現可能性」は、「最小ΔV」に相当します。
ここで行われる分析の目的であり、このパラメーターの正確な定義は以下で明確にされます。
2.方法
通常、宇宙船ミッションの予備設計では、燃料の使用を最小限に抑え、有用性を最大限に高めようとします。
ペイロード質量。この一般的な目的は、実際には特定のミッションごとに詳細に検討する必要があります
それにもかかわらず、さまざまな方法と異なる仮定を採用することにより、一般的な意味で対処することができます。
この研究では、化学ロケットなどの高推力推進法が想定されています。これにより、近似することができます
の離散的な瞬間的な衝動的な変化によって接続された一連の円錐曲線としての宇宙船の軌道
各ノードでの速度 (ΔV ) (したがって、無限かつ瞬間的な推力を想定)。さらに、ノードが惑星の場合、重力アシスト(GA)を使用して、太陽に対して探査機を加速または減速させることができます。
推進剤の必要はありません。この GA の有効性は、宇宙船の近点 - 問題の惑星への最接近。 (近点は受信するように選択されますオーベルト効果からの最大の利益 (Blanco & Mungan 2021).)
各惑星の遭遇の近点と ΔV は、前の惑星の到着速度を仮定することによって計算できます。
円錐曲線とそれに続く円錐曲線の出発速度 (どちらも惑星に関して) は双曲線です。
到着超過速度と出発超過速度。これにより、共通点で接続された 2 つの双曲線の計算が可能になります。
対応する ΔV は、単純に 1 番目から 2 番目に到達するために近点で送達されたものです。
これらはすべて、Optimum Interplanetary として知られる予備的な惑星間ミッション設計ソフトウェアによってモデル化されています。
Trajectory Software (OITS)、Hibberd (2017) を参照。このソフトウェアは、2 つの非線形計画法 (NLP) ソルバーを使用します。
NOMAD (Le Digabel 2011) および MIDACO (Schlueter et al. 2013, 2009)。
OITS の詳細な説明と、モデル化に使用できる「中間点」として知られる機能の解明
V∞ Leveraging Maneuvers (Sims & Longuski 1994) は Hibberd (2022) にあります。上で適用された理論に注意してください
仮定は追加の考慮事項を無視するため、この研究を一般的な実現可能性と軌道設計の考慮事項に限定します。
宇宙船の動きに影響を与える力 (太陽放射圧など)。ただし、これは、
この分析のために訪れた天体、惑星の非常に正確な天体暦、さらに言えばUN271
NASA JPL Horizons サービスを通じて提供され、適切な NASA SPICE カーネルが生成され、利用されました。
OITSによる。 UN271 の場合、カーネル ファイルは 2021年 6月に生成されました。
3. 結果
3.1.フライバイミッション
UN271 へのフライバイ ミッション、つまり、大幅な補正なしに目的地に接近および離脱するミッション
速度を目標に一致させるには、地球からUN271への直接転送または組み合わせを使用することで達成できます
パワードまたはパワードされていないGAの。
3.1.1. 直接転送
このセクションでは、UN271 への直接転送を想定し、双曲線超過速度を最小限に抑えたいと考えています。
地球では、V∞ と指定されます。 一般に、ここで採用された種類の予備的なミッション設計では、タスクは最小化することです
惑星間軌道の何らかの測定基準、通常は ΔV であり、正確な文脈に応じてこれを定義します。 為に
その瞬間、ΔV = V∞ と仮定します。 図 1 は、2 つの独立した直接軌跡のカラー コンター プロットです。
変数 – X 軸は 2020年から 2035年までの打ち上げ日で、Y 軸は全体の飛行時間です。
年。 色が濃く青くなるほど、ΔV は低くなります。 このようなプロットは、ポーク チョップ プロットと呼ばれることがよくあります。
この等高線図では、地球がその軌道上で年間スイート スポットを占めていることから生じる年間パターンを確認できます。
UN271に関しては、その時点で、2つの機関の相対的な連携はミッションにとって特に好都合です.
図 1. UN271 へのフライバイ ミッションの獲得ΔV プロット、右側にカラー バー、単位は km/ s
図 2. 白い領域は、特性エネルギー C3 が実行不可能な場所です
図 3. ジュピター フライバイを使用して UN271 をフライバイするミッションの獲得ΔV プロット
図 4. 近木点高度 200 km の獲得ΔV
図 5. ジュピター フライバイによる UN271 へのミッションの実現可能な ∆V の獲得ΔV プロット
図 6. 木星重力アシスト (GA) を使用した UN271 へのミッションの例
関連記事:検出された最大のオールトの雲天体のサイズとアルベド










※コメント投稿者のブログIDはブログ作成者のみに通知されます