閉塞運転に関しては私も他人の事を言ってられない程やったことのないジャンルですので、これを機にちょっとやってみたいと思い、自動センサーによる閉塞運転サンプルレイアウトを作ってみました。
上段の1つ目はアイマジックがマニュアルで書いた方式(共通ステータスで自動停止&自動出発のコマンド使用)です。しかしながらこの方法は再出発後の速度が遅いので、加速のセンサー(図の水色センサー:現状外してます)を追加したのですが、こうすると何故か再出発しなくなります。色々試してみましたが現在原因不明でDISCORDのパワーユーザーに心当たりがないか尋ねているところです。
次に下段の2つ目ですがこれは以前顔文字さんに教えてもらったセンサーループ方式です。信号の制御はアイマジック方式と同じにしていますが、再出発に関してはセンサーをループ内で繰り返し呼び出す方法で対応しています。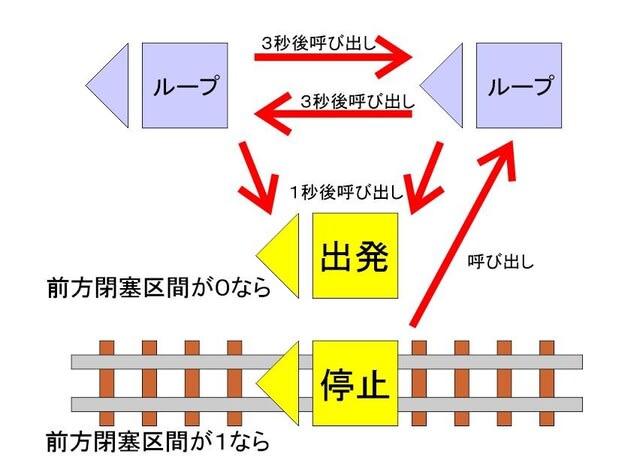
アイマジック方式がオートマだとすると、センサーループ方式はマニュアルで面倒臭いのですが細かい指示ができるので色々な制御をしたいのならばセンサーループ方式の方が良いでしょう。データはコチラからどうぞ。VRM5第2号が必要です。

ランキングに参加中。クリックして応援お願いします!


最新の画像もっと見る




最近の「VRM自動センサー」カテゴリーもっと見る






Rosso Laboratory
主に鉄道模型シミュレーター(VRM)などの仮想鉄道アプリを扱うブログです。またHDR写真の記事も書いています。

最近の記事





カテゴリー
- 重要記事(18)
- HDR写真(91)
- VRM-NX(227)
- NX-TOMIX(107)
- VRM入門(82)
- VRM動画(65)
- VRM自動センサー(10)
- 天球テクスチャー(62)
- 編成(115)
- Pythonスクリプト(90)
- VRMoNLINE(25)
- VRMノンジャンル(187)
- VRMの日(17)
- 鉄道模型レイアウター(28)
- Trainz(181)
- A9(10)
- 鉄道模型(81)
- VRM4CV(69)
- cVss(20)
- VRM-Nietzsche(28)
- めっけ(8)
- 無理矢理ストラクチャ(29)
- VRM4GIS計画(仮)(12)
- VRM用技術(25)
- VRMスクリプト(21)
- 参考写真・参考書籍(25)
- 3DCG(92)
- サウンド(5)
- 単なる雑談(77)
- ノンジャンル(9)
- 双極性障害(2)
- 生活(1)
- グルメ(0)
バックナンバー
2017年
人気記事

