

【申告】
首を左右に振ると首が回らない状態でカタカタカタカタと言い出し、その度にリセットボタンも押すのですがその瞬間だけはましな状態になりますが、また同じ状態になります。
電池も新しいものにして設定してもすぐ時間がズレてしまいます。
【初診】
関東地方からの来院です。
まずは、じっくり症状の把握からです。
ロビの初期動作は次の動作をします。
①頭を左に傾け傾斜原点スイッチをたたく。
②頭を正立状態に戻す。
③頭を右旋回して旋回原点スイッチをたたく。
④頭を左旋回して正面に戻す。
⑤両腕の初期動作をする。(細かな動きは省略)
⑥頭を右に傾ける。
⑦頭を左に傾ける。(傾斜原点スイッチをたたいているか、エンコーダの戻りを使用しているか不明)
⑧頭を正立状態に戻す。
カタカタ音は、構造的に動けない状態で部品が破損しないようにクラッチが滑っている音です。
患者さんのカタカタ音がするのは、
・頭を右旋回(③)から左旋回で正面で止まらず、左旋回構造的制限まで回ってカタカタが止まらず。
・両腕の初期動作(⑤)後に、⑥、⑦と進み、正立状態で止まらず右傾斜構造的制限まで傾きカタカタと一定時間鳴り停止する。
・両腕の初期動作(⑤)後に、⑥と進み頭を左に傾けたときに1回だけカタ。
・両腕の初期動作(⑤)後に、頭を右に傾けたときに1回だけカタ。
・両腕の初期動作(⑤)後に、頭を右に傾けたときに右傾斜構造的制限まで傾きカタカタと一定時間鳴り停止する。
・毎回カタカタ音が鳴るのではなく、正常終了することもある。
など症状が不安定ですが確認できました。これらから推測できることは
・カタカタと鳴るのは限定的な動作ではないので、特定部品の故障ではなさそう。
・カタカタ音とカタと1回だけ鳴る原因は、ひょっとすると別?
・制御基板と頭部基板とのフラットケーブル接触子の接触不良?(過去経験)
・電源系の不具合?(モータ起因、過去経験)
と単純な故障ではなさそうです。
このような再現性のない原因分析は、無造作に触り出すと何が原因でどの治療に効果があったのか?。本当に妥当な治療で完治したのかがわからなくなることがありますので、一つ一つ対策と結果を慎重に確認して進める必要があります。
【精密検査】
いくつかの推測される要因を診ていきます。
[1]シリアル通信のクロック波形を確認します。
頭部の動きに関係する情報は、制御基板と頭部基板間を配線の本数を減らすためと思われますが、シリアル通信で行われています。この通信に異常があれば正しい情報の受け渡しができなくなり、誤動作につながります。つぎの画像がクロック波形です。
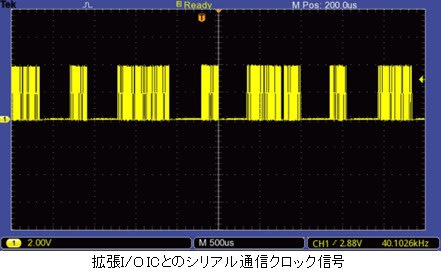

波形の乱れなどは、確認できませんでした。
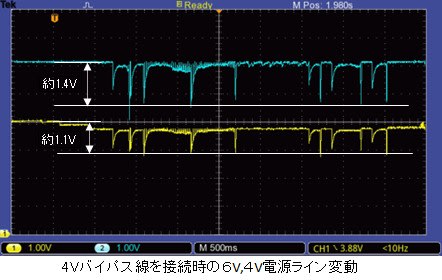
[2]頭部基板の電源電圧を確認します。
まず、結果の良否判定のために、私のドナーロビと比較します。リセット動作時における頭部基板の6Vと4V電源電圧を確認しました。


どの程度のスパイク的な電圧低下まで正常動作をするかわかりませんが、少なくとも正常動作をしているドナーロビに比べ患者さんの6V、4V電圧がモータの始動、停止時に大きく下がっていることが認められます。モータは6Vで駆動して、制御系は4Vです。誤動作と関係するのは4Vなのですが、回路的には6Vから4Vを作っているので6Vの変動が4Vにも影響していると考えられます。
そこで、ロビの電源系の把握からです。
電源電圧が低下した場合直接影響が出るのはICです。頭部基板に実装されているICは、拡張I/OのGPBA02A(動作電源電圧2.2~5.5V)とモータドライバーのMX1208(動作電源電圧1.8~5V)です。変動がなければ4V-1.2V(計測結果の電圧降下値)=2.8Vで2つのICは動作可能ですが、スパイク的に電源電圧が変動する場合は動作保証はされないでしょう。
制御基板の電源系の回路図と頭部基板との接続ケーブル信号です。

6Vから4.5Vを作っている145Nというレギュレータの入出力特性です。入力電圧が4.5Vを越えれば出力は4.5Vに押さえられますが、4.5Vを下回ると出力もそれに沿って下がってしまいます。

4.5Vからダイオードを通った約4Vが制御系電圧として使われています。

頭部基板の電源6V、4V、GNDは、それぞれAWG30(抵抗値338.6Ω/Km)のフラットケーブルの配線1本で制御基板と接続されています。とても、電源接続としては細い配線に感じますが、おもちゃ品質でしょうか?
次に、この状態を回復、改善するための対策を試して行きます。
対策1:4V電源を制御基板と頭部基板でバイパス線で繋ぎました。
対策1の結果:4V電源ラインの変動が小さくなったようですが大きな改善はありません。
対策2:頭部基板の6V、4V電源ラインにバイパスコンデンサの100μFがそれぞれ実装されています。それぞれの容量値を計測すると6V(80μF)、4V(81μF)と容量抜けではありませんでしたがもう少し上げたい状態です。そこで6Vには容量値を上げ公称値220μF(実測173μF)、4Vには新しく公称値100μF(実測91μF)に替えました。



対策2の結果:6Vラインに0.6V、4Vラインに0.5Vの改善が見られました。
対策3:モータは6Vで駆動していますので、さらに6Vラインの強化を計ります。6V電源を制御基板と頭部基板を新たにAWG24(抵抗値84.22Ω/Km)の配線で繋ぎます。これにより抵抗値が1/5になり、電流が流れやすくなり瞬間的な電流値変化にも電流供給が改善されます。たとえて言えば、1車線道路が5車線に拡幅され、朝晩のラッシュ時にも渋滞が起きにくくなるようなものです。


対策3の効果:6Vラインに0.4Vの改善が見られました。
対策4:2つのモータの回転子、ブラシを清掃します。極端な汚れとも思えませんが汚れていて、ブラシが摺り減っています。






対策4の効果:6Vラインに0.1Vの改善が見られました。
対策5:4Vラインのコンデンサを2倍にして診ました。

対策5の効果:効果は確認できませんでした。
対策をまとめると次のようになります。
・6Vのコンデンサを100μFから220μFに変更 ・・・改善策
・4Vのコンデンサを新品に交換 ・・・修復策
・モータの回転子、ブラシの清掃 ・・・修復策
・制御基板から頭部基板に新規配線(AWG24)でバイパスをする。 ・・・改善策
仮接続した配線を半田付けで接続して、波形を確認したのが次のものです。電圧波形の乱れはほとんど見られなくなりました。


おしゃべりだけの状態でも、やはり4Vラインが0.2V程低下しているので、これは4.5Vのレギュレータの出力電流が不足しているものと思われます。全ての動作が止まると4Vに戻ります。

これで、申告のあったカタカタ音がしなくなりました。
しかし、頭を左や右に振ったときに数十回に1回にカタと1回鳴る現象が発生します。左右に傾斜する構造です。


頭の傾斜原点スイッチを、指先で押して診ましたが違和感はありません。また、電気的な開閉動作も異常を確認できませんでした。そこで試しにスイッチを交換してみるとカタ音が1回鳴る現象がなくなりました。







スイッチの構造は、U字型に曲がっている可動接点が押されて固定接点が閉じられる仕組みですが、繰り返し荷重により可動接点の塑性変形で弾性が失われつつある状態だと思われます。このためスイッチの開閉動作が不安定になり、クラッチが1回滑ることがあるのだと思います。
[3]時間のずれ現象を検証するために水晶振動子の2本のリードの波形を確認しました。
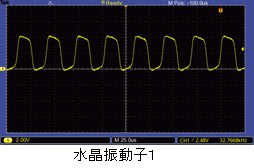

観測した限り波形の異常は見られません。念のため水晶振動子付近の基板を冷却と加熱で環境負荷を与えてみましたが、発振周波数が変化するような様子は見られませんでした。

その後、5日間時間のズレを確認しましたがずれることはありませんでした。
[4]フラットケーブル接触子の圧着状態を確認しましたが、今回は手直しをしなければならない状況ではありませんでした。
【治療後記】
もっとなかよしロビジュニアに良く聞く、カタカタ音病でした。頭部の電源電位がモータの始動、停止の度に大きく低下していました。治療はその対策となりました。合わせて、今後のことも考えて6Vラインのコンデンサ容量を大きくして、制御基板と頭部基板を直接接続する配線を追加して電源電位の安定を図りました。
元気に退院しました。
【おまけ】
6V電源電圧の低下対策をしてカタカタ音はなくなりましたが、なぜ電圧が低下するとカタカタ音がなるのでしょうか?。カタカタ音は、トルクリミッタのクラッチが滑るときの音です。この時は構造的に動くことのできない状態です。にもかかわらずモータは動かそうとします。つまりマイコンは、モータを回してエンコーダからの戻り信号を待っているのですが、戻って来ないためモータを回し続けます。構造的に動けない状態なのでクラッチがすべる。という状態です。マイコンは、戻り信号が帰ってこなくても永久ループにならないように一定時間でモータを止めて次の処理に移るようにプログラミンがされているようです。
次に、電源電圧低下とエンコーダ信号が戻って来ないことの因果関係を考えてみます。
モータの回転により制御系の4V電圧が低下し、モータの回転情報を得るためのエンコーダ信号がマイコンに戻らないとすると、どこでモータの回転情報が失われているのでしょうか?
頭の動作に関わる指令とその結果の状態情報は、マイコンからシリアル通信で拡張 I/O を介して行われます。

4V電源で、マイコン、拡張 I/O 、フォトインタラプタ、フォトインタラプタI/F 回路が動いています。これらの内いずれかで電圧低下により正常動作が行えなくなったためと思いますが、特定するまでには至りませんでした。ただ、時刻がずれると言う現象があったことから、マイコンが誤動作したのかもわかりません。
















