こんばんわ
としぶぅ~です。
昨日の続きです。
まず、27号です。

今までに作った部品と今号の部品に埋め込みます。
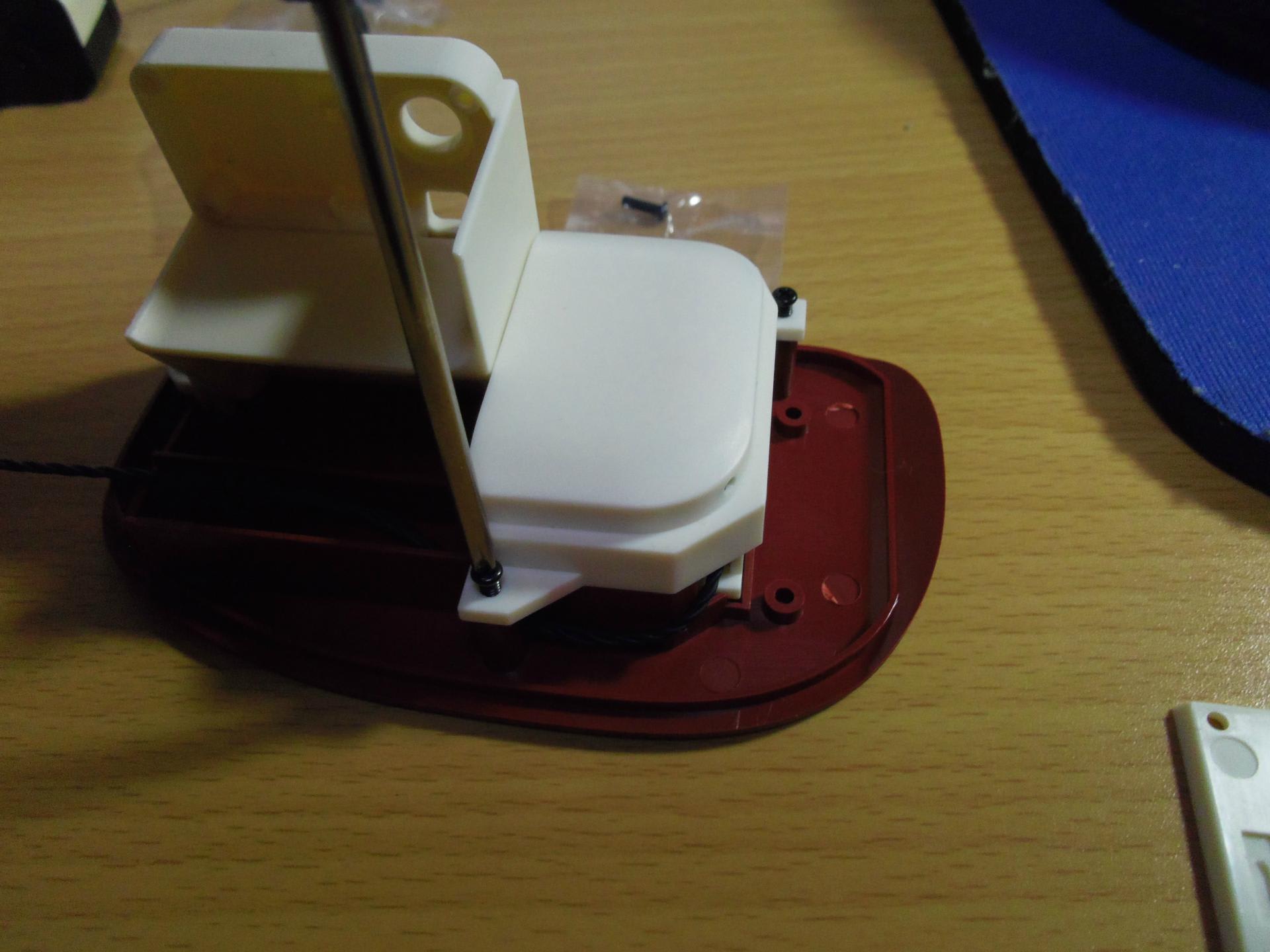
まずサーボのついた部分をねじ止め。。。 次に間接部分のねじ止め・・・ここは苦戦!ドライバーに磁石がないからねじを穴に入れるのがたいへんだった。。。
次に間接部分のねじ止め・・・ここは苦戦!ドライバーに磁石がないからねじを穴に入れるのがたいへんだった。。。
つぎは配線通路に這わせて配線を通す・・・これも結構苦戦・・・・手の大きいわらしには(笑) ピンセット使いました(^^;
ピンセット使いました(^^;
配線がでたのでまだ組み込んでなかったサーボをコネクタに差し込んで
 こんな感じにその後はねじ止め!
こんな感じにその後はねじ止め!
ねじ止め後は、足の甲を取り付けたときに配線を挟まないようにルートとり・・・またもや手の大きいわたしは苦戦(^^;) で、足の甲のふたをしてねじ止め・・・
で、足の甲のふたをしてねじ止め・・・ ねじは足の裏・・
ねじは足の裏・・
間接部の配線が見えないくするためにふたをねじ止め
26号分は完成! 
ちょっと苦戦したけどなんとかできた。。。手が大きいと細かい仕事はきびし~
さて、28号いってみよう!

27号で組み付けた部分と、28号で入っていた部品。
とりあえず新しい部品の組み立て  2部品を組み付ける
2部品を組み付ける  で、ねじ止め
で、ねじ止め 
次はサーボに、今組んだ部品を取り付けます。。。。写真醜い(笑)。。。サーボはギヤ部も黒いので・・・
組み付けるとこんな感じ 
最後に次号ようの配線にシール張って完了。 
今号は簡単だった!
よし、次
29号いきます。

サーボチェック用の頭部と、今号付属のサーボモーター
サーボモータのねじをはずして  28号でシールを貼った配線を接続
28号でシールを貼った配線を接続  で、ねじ締め!
で、ねじ締め!
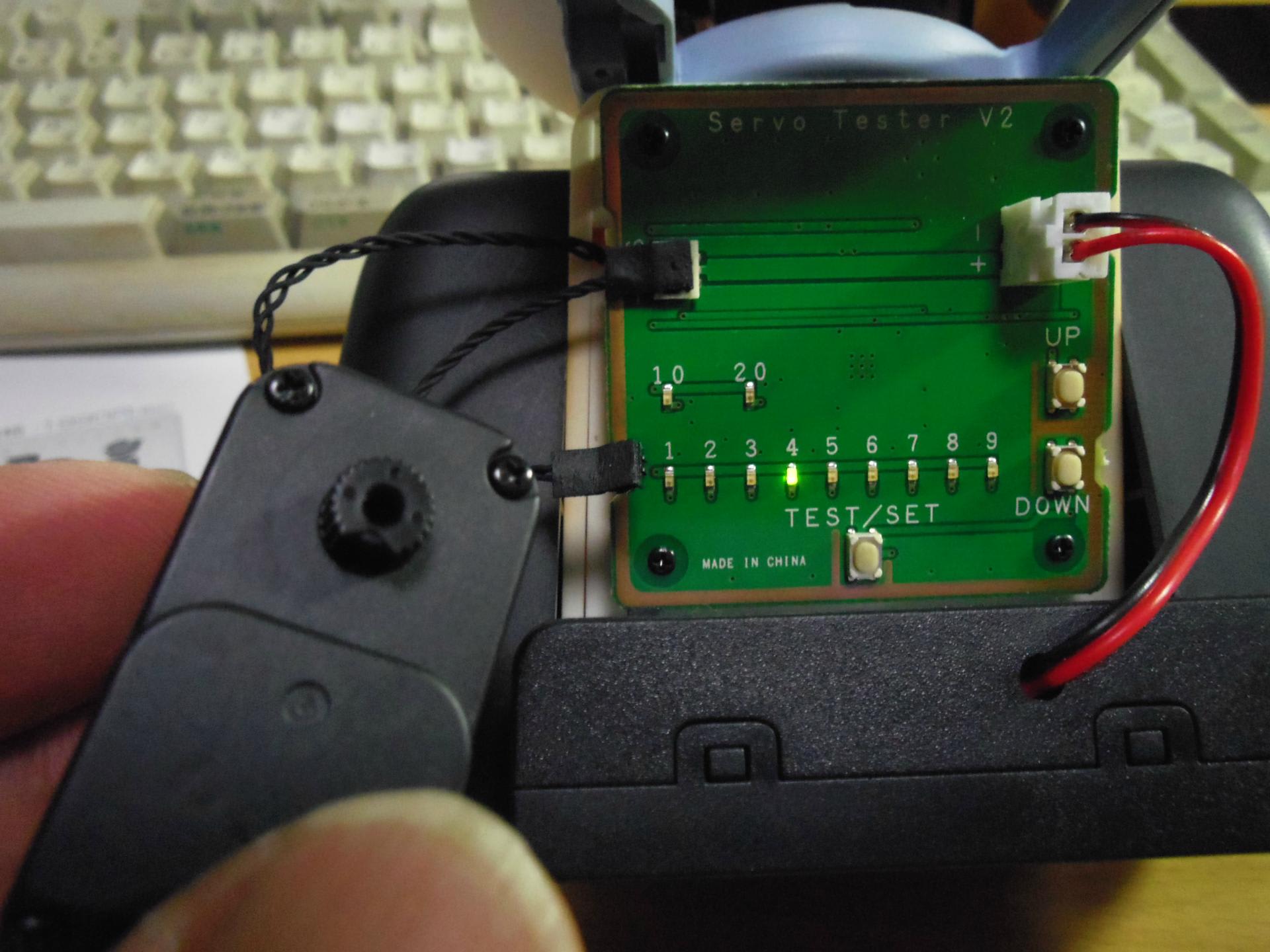
次は動作確認 
IDをセットして  29号も完了!
29号も完了!
さて・・次だ(笑)
30号いきます。

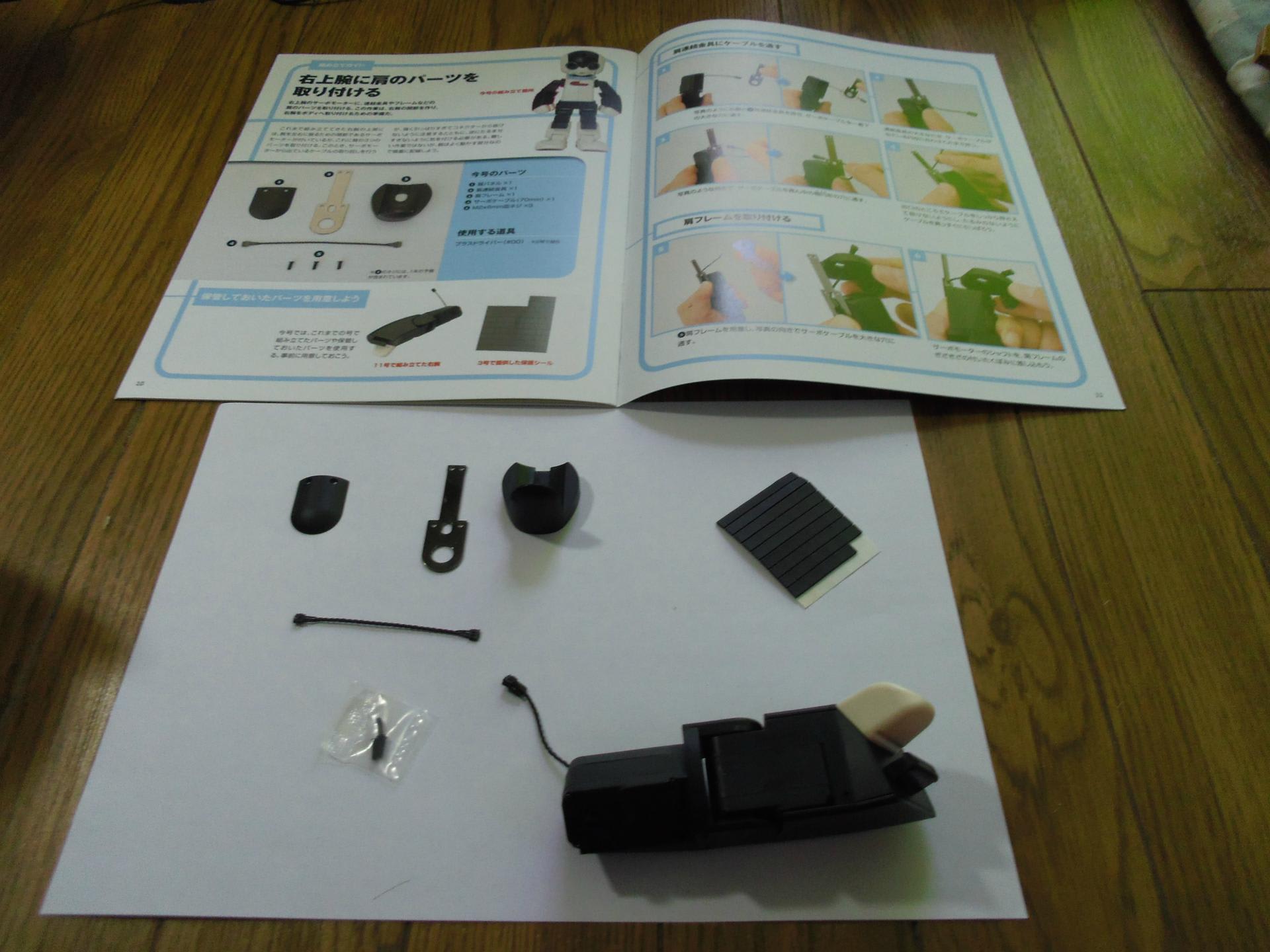
29号までで組み立てた部品と、30号付属の部品!
まずは、新部品に配線通し  このパーツに
このパーツに  こうして
こうして  こう通して・・・
こう通して・・・  こんな感じになる。
こんな感じになる。
そしてもうひとつの部品にも  こんな感じに通しますが・・・・むずかしいぞ(笑)
こんな感じに通しますが・・・・むずかしいぞ(笑)
次は29号で準備したサーボモータのねじをはずして。。
 さっき通した配線を差し込む
さっき通した配線を差し込む 
で、新部品の溝にサーボから出た配線を差し込む  サーボをくみつけ
サーボをくみつけ 

次に、サーボの回転部分を29号で組んだ部分に組み込む  差し込むとこんな感じ
差し込むとこんな感じ 
そして
反対側の部品を  穴にあわせて組み付ける
穴にあわせて組み付ける  ひざの裏?からねじ止め
ひざの裏?からねじ止め 
完成! 
なんか疲れてきた(笑)
ま、次ぎ行きましょうか・・・・
31号です。

30号までに組み立てた部品、サーボチェック用頭部、31号付属のサーボモータです。
まずは、31号付属のサーボモータのねじをはずして 
 30号で準備した配線を取り付け
30号で準備した配線を取り付け  一度チェック用にふたをします
一度チェック用にふたをします 
で、サーボの動作確認とID”3”の書き込み・・・・ 
ここまでできたら、またサーボモータのねじをはずします 
 30号までに組み立てた部品から出ている配線を接続
30号までに組み立てた部品から出ている配線を接続 
次に、サーボから出ている配線を黒い部分の穴に通す・・・・わかりにくい(笑) 
サーボを30号までに組み立てた部品に組み付ける・・・・配線をはさまないように・・・  押し込んで
押し込んで  ねじ止め
ねじ止め 
最終・・・こんな感じ  完成!
完成! 
31号完了!
よし・・・後3号・・・がんばろう
32号行って見よう!!

31号までに組み立てた右足部分と、32号付属部品。。。。サーボモータの接合部かな。。。あと、サーボ用の配線!
では組み立てます。  サーボと部品を組み込み
サーボと部品を組み込み  こんな感じ・・・後は配線にシールを貼ります。
こんな感じ・・・後は配線にシールを貼ります。
32号完了!
32号は簡単だった(笑)
あと、前回書きましたが、樹脂の部分・・・の変色について32号に取り替える・・・とメッセージが入っていました。
もう少し後かな。。。
後、ドライバーに磁石がないことも・・・・効すれば便利と記事の中に書いてありました。。。。ってつけてよ(笑)
さてもう一息・・・がんばろう!
次33号行きます。

33号はサーボモータだけ付属です。
配線して、チェックしてID”2”を書き込む・・・だけですね。
サーボ分解 

 で配線・ねじ止め
で配線・ねじ止め  完了!
完了!
最後にチェック!  終了です!
終了です! 
34号はモップシューズの組み立て見たなので・・・次に回します。。。なんか疲れた(^^;
同じ子と繰り返すのは結構つかれますね・・・
さて・・・次ぎ組み立てるのは左足のパーツがそろってからかな・・・
今日はこの辺にしておこう!
それではみなさん!またねん(^o^)/












 完成・・・
完成・・・
 完成・・・
完成・・・
 完成・・・
完成・・・
 完成・・・
完成・・・
 完成・・・
完成・・・
 完成・・・
完成・・・
 完成・・・
完成・・・
 完成・・・
完成・・・
 なんとか完成・・・
なんとか完成・・・
 いっきにスピードアップ(笑)ちょっとびっくり!
いっきにスピードアップ(笑)ちょっとびっくり!
 完了・・・
完了・・・
 完了!
完了!