VRMNXレイアウト作成入門【第五章】レイアウト作成(中級編) 第14回 センサーを使う
センサーで自動運転と鉄橋通過音の再現をやっていこうと思います。

①自動運転
プラットホーム入線前のポイントは自動で交互に切り替え、直進の場合は通過、待避線の場合は停車するという自動運転を組みましょう。線路敷設時にポイント部はコピペで作ったので同じ名前のポイントが存在しています。これだと動作を指定するのが難しくなるのでまずは名前を変えましょう。上のホーム入線側のポイントを「RAILPOINT_1」とし、出口側を2、下のホームの出口側を3、入線側を4としました。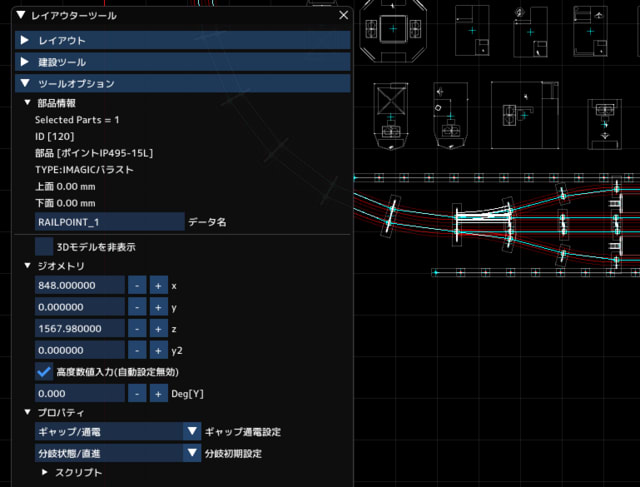
下のホーム側から作業します。まず出口側手前にパーツパレット[センサー]から自動センサーを配置します。高度は固定しません。
そして右ドラッグのポップアップメニューからATS動作エディターを起動して動作コマンド追加を1回押し、種類:ポイント、部品:RAILPOINT_4、CMD:順次切り換えとします。
次に出口直進側は種類:ポイント、部品:RAILPOINT_3、CMD:切り換え(直進)とし、
出口分岐側は種類:ポイント、部品:RAILPOINT_3、CMD:切り換え(分岐1)とします。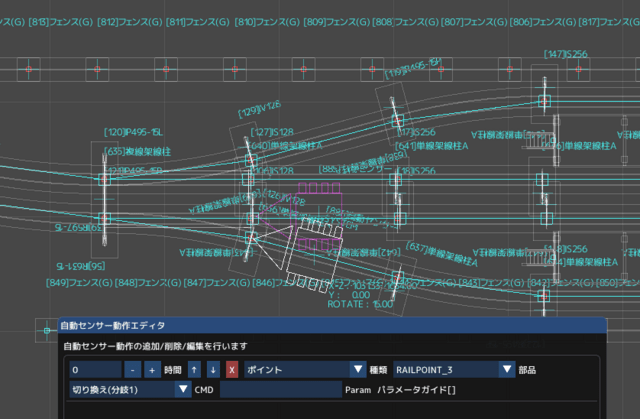
完了したら編成を自動出発させて動作を確認してみましょう。
上手くいったら次に停車と出発用の自動センサーを入線側ポイント通過後の分岐側に配置します。ホーム端部あたりで良いでしょう。編成の長さが900mm弱ぐらいだったから950mm先で止めるとします。
動作コマンドを3つ追加します。1つめは停車用で種類:検出した編成、CMD:指定距離(mm)で停止、Param:950。2つめは出発用で種類:検出した編成、CMD:指定時間経過で出発、Param:20000。3つめは加速用で時間:30000、種類:検出した編成、CMD:1000mmで指定速度に、Param:100とします。説明すると1つめは踏んだら即始動で検出した編成を950mmで停止し、2つめは踏んだら即カウント開始で20秒後に出発で、3つめは踏んだ30秒後に1000mmで100km/hに到達させる命令をスタートさせます。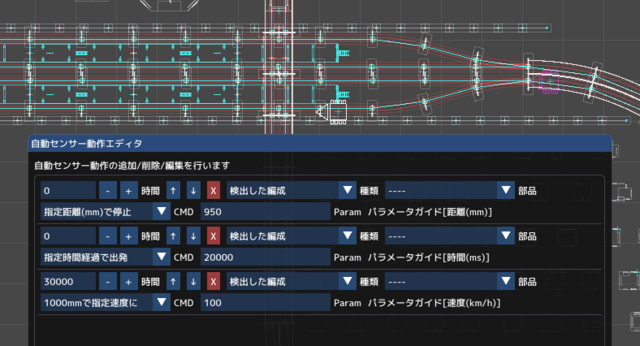
出来上がったら動作を確認し反対側も同様にしてやりましょう。
②鉄橋通過音
OneDrive【公開レイアウト】から「E231ガーター橋080725.wav」をダウンロードしてください。これをツール[レイアウト]-[リソース設定]のリソース管理で登録します。
パーツパレット[センサー]の自動センサーを2つ、[音源]の音源を1つ配置します。
音源はツール[ツールオプション]-[プロパティ]のデータ名を「BELL_1」にして、[ツールオプション]-[プロパティ]のサウンド可聴半径を1000、音源リソースIDを4にします。
進入側自動センサーは右ドラッグのポップアップメニューからATS動作エディターを起動して動作コマンド追加を1回押し、種類:音源、部品:BELL_1、CMD:再生とします。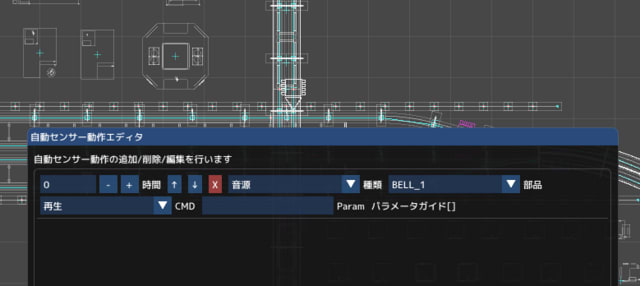
退出側自動センサーはツール[ツールオプション]-[プロパティ]の台車検出条件を最後尾台車を検出に変更します。
ATS動作エディターを起動して動作コマンド追加を1回押し、種類:音源、部品:BELL_1、CMD:停止とします。
完成したら動作をビューワーでチェックし、出来上がったら反対側も同様に設定します。
以上で第14回目は終了です。次回は上級編として地形編集で山を作ってみます(^^)/
<スターターキットのダウンロード先はコチラです>