「cVss」では、ポイントのスクリプトは全て共通の「多機能ポイント」とし、ポイント手前に配置されるセンサーによって、それぞれの機能を呼び出す仕組みになっています。
---*---*---*---
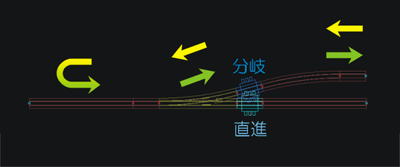
<自動合流センサー>

水色の「直進方向」と青色の「分岐方向」の2つがあります。2車線側の「直進側」と「分岐側」にそれぞれ配置して、自動的に合流するためのセンサーです。
---*---*---*---
これに、折り返しの状況も踏まえて、考えてみると、

編成が2車線側の「直進側」から進入すると、まずセンサーでポイントは直進方向になります。この後通過した編成が折り返してくると、他編成が新たに通過していないという条件では、直進方向のままですから、元の「直進側」へ出て行くことになります。しかし、折り返し時にはポイント手前にセンサーがないので、確実に「直進側」へ出て行くとは限りません。他編成が「分岐側」から進入している可能性もあるからです。
同様のことが、「分岐側」からの進入にも言えます。
そこで、この折り返し時の動作を明確にしてみます。
<分岐時に「直進方向」を使う>

1車線側に「直進方向」のセンサーを置きます。2車線側の「直進側」から入って折り返し再び「直進側」に出る。これはあまり使いそうにないですね。

2車線側の「分岐側」から入って折り返し「直進側」に出る。これは一方通行としては使えそうです。この場合、右側の「直進方向」のセンサーは意味がないので削除することが出来ます。パーツレイアウトではVSEや機回しのポイント部分で使っているパターンです。
<分岐時に「分岐方向」を使う>

1車線側に「分岐方向」のセンサーを置きます。2車線側の「直進側」から入って折り返し「分岐側」に出る。これも一方通行としては使えそうです。この場合、右側の「分岐方向」のセンサーは意味がないので削除することが出来ます。パーツレイアウトでは機回しや待避駅のポイント部分で使っているパターンです。

2車線側の「分岐側」から入って折り返し再び「分岐側」に出る。これもあまり使いそうにないですね。
---*---*---*---
ということで、「直進方向」や「分岐方向」を1車線側に配置しても使えるパターンがあることがわかりました。しかし、これは一方通行という条件で成立するものです。上り下りのある単線スイッチバックでは使えません。
そこで使うのが、「トグル分岐センサー」です。「トグル分岐センサー」は2タイプありますが、使うのはタイプ1の単純動作のものです。タイプ2のフラグ動作のものは合流側の影響を受けませんが、作った本人もどう使うべきか、うまく説明できないので省略します。タイプ2は何か動作に変化をつけたい時に使えばイイんじゃないでしょうか(笑)。
---*---*---*---
<分岐時に「トグル分岐(タイプ1)」を使う>

1車線側に「トグル分岐(タイプ1)」のセンサーを置きます。編成が2車線側の「直進側」から進入すると、まずセンサーでポイントは直進方向になります。この後通過した編成が直ちに折り返すと「トグル分岐(タイプ1)」は
ポイントの状態を逆転させるので、「分岐側」へ出て行くことになります。

また、「分岐側」から進入する場合も同様です。
これで、山を登るためのスイッチバック用のポイントが出来上がりです。
---*---*---*---
さて、「自動合流センサー」では一方通行、「トグル分岐センサー」では通過した編成が直ちに折り返す、等の条件が付きました。これでは使える部分は限定的です。そこで、編成毎にどちらに進むのかを指定したセンサーを準備しました。それが「支線分岐センサー」です。
---*---*---*---
<分岐時に「支線分岐」を使う>

「支線分岐」を使うと編成毎に動作が決められますので、この絵の意味はあまり無いですね(笑)。
なので、使い方を中心に説明します。
編成毎に動作が違うのですから、当然編成に動作パターンを教えておく必要がありますし、どのポイントが対象なのかを指定しておく必要があります。しかし、「cVss」は部品名を使いません。なので、数値で指定します。
<多機能ポイント>
//----------------------------------------------------------------------
//ユーザー設定項目
//支線分岐用途:第1列~第3列
set VarBranchLineNo 1
//----------------------------------------------------------------------
ポイントには1~3の値を指定します。これは列であって番号ではありません。なので、ポイントが最大3個使用できるというのではなく、最大2の3乗(=8)に分かれられるということです。つまり、

ということです。そして、編成には動作パターンを記載します。
<編成>
//----------------------------------------------------------------------
//ユーザー設定項目2(動作設定)
//支線分岐指示(000、001、010、011、100、101、110、111の8パターン)
set VarBranchLinePointOrder 000
//----------------------------------------------------------------------
一の桁が第1列、十の桁が第2列、百の桁が第3列のポイントの動作(0か1か)になります。
ちょいと面倒な感じですが、これには拡張性という面で幾つか利点があります。デフォルトでは第3列までですが、第4、5・・・と増やすことが比較的容易です。それと少し複雑な話になりますが、編成の支線分岐指示はグローバル変数に保管されているので、ある路線を走行したら、一時的にこの値を変更して動作させるということも可能です。そのためには新たなセンサーを準備する必要がありますが、「ターミナル駅出場指令センサー」というのが実際にこれと同じようなことをしているので改造も簡単です。ただ、そこまで使う人が果たしているか?ということで未だ準備していないというだけのことです。
---*---*---*---
未だターミナル駅のポイントの説明はしてませんが、大体「支線分岐」と似たようなものです。駅用センサーの使い方の説明を書く時があれば一緒に書こうと思います。
とりあえずは、これだけのポイントが扱えれば、大体使えるんじゃないだろうか?と思っていますので。

















