

【申告内容】
1年3ヶ月程前に無通電状態のロビジュニアを譲り受け生活していましたが、電池の消耗が激しくなり1週間程でなくなります。そのうち現在時刻が狂い、リセットを繰り返し使用していましたが突然首がガタガタと音を出し、おしゃべりもしなくなりました。
近くのおもちゃ病院に入院して診てもらいました。診察結果は、”首の内蔵ギアが損傷していて 交換のギアが入手出来ない為治療ができない。ガタガタ音がしないように首の動きを止めた。”とのことで退院してきましたが、現在時刻が狂うことも治っていなく、その後、全く動かなくなりました。
【問診】
メールで問診を繰り返し、
・近くのおもちゃ病院の診断として首の内蔵ギヤが損傷しているとのこと。
・時刻や動作不能は、電源系統に問題を抱えていそう。
マイコンに病巣があれば、治療不能。
ギヤは、治療可能な範囲か?。最悪3Dプリンタで作成か?
とある程度覚悟をもって治療をお引き受けしました。
【来院・初診】
鬼子母神のお守りを背負って入院です。持ち主様のお気持ちが伝わります。

外部のインターフェース類です。




ロビジュニアは、お尻スイッチがあります。”もっとなかよしロビジュニア”では、傾斜センサーに変わっています。


まずは、電源系の確認からです。
電池BOX裏側にあるヒューズの確認です。抵抗型のヒューズで異常は確認できません。

動作させない状態で制御基板の制御系の電源電圧、時計のクロック波形には異常は確認できません。
乾電池の代わりにユニバーサル電源を接続して動かすと、ユニバーサル電源の過電流を示す赤いLEDが点灯することがあります。大きな電流が流れることで電圧が低下し、マイコンが正常動作をできなくなり時刻が狂ったり諸症状の異常を引き起こします。また、乾電池の消耗も早まります。他方、電源は多くの箇所につながっていますので、大きな電流が流れている箇所を特定することが難しいので、少しずつ範囲を狭めてゆくことにします。

大きな不具合の陰に小さな不具合が隠れないように制御基板のコネクタを1個ずつ抜いていき、過電流との関係を確認していきます。頭部と接続する2本のケーブルを外すと過電流が流れないことを確認できました。これにより、過電流の原因が頭部にあることがわかりました。
次は、頭部の確認です。既に関東のおもちゃ病院で開頭がされていますので、注意深く状態確認をしながらねじを外して行きます。







頭上下旋回モーターケーブルが外されていました。これが、"ガタガタ音がする頭の動きを止めた処置"と思われます。



頭部ブロックと基板を固定する部品の止めねじが1本ついていませんでした。


同じピン数のコネクタが多いので、マーキングをしながらケーブルをはずしていきます。



頭部のギヤボックス内を検査します。






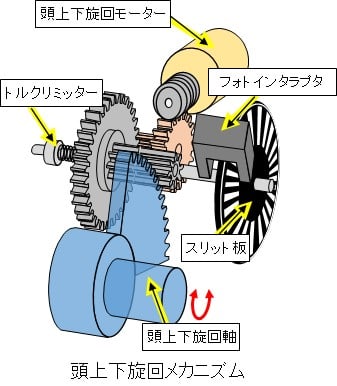
2軸の駆動系がコンパクトに収まっています。3次元CADによる構造設計に依らないと、これだけコンパクトにはならないと思います。それぞれの軸のギヤ構成です。回転軸には、スリット板とフォトインタラプタによりエンコーダーが構成され、過負荷による電気的、構造的な致命的破損を避けるためにトルクリミッタ機構が付いています。確認する限りギヤの破損は見つけられません。また、構造的な破損も確認できませんでした。

内部構造を把握できたので、異常電流の原発巣を探します。上下旋回モーターケーブルだけを接続しても異常電流は流れませんが、左右旋回モーターケーブルを接続すると異常電流が流れ、左右旋回をしません。左右旋回駆動系に問題を抱えています。
モーターが回転せず異常電流が流れる主な原因としては、
・モーター内部で短絡している。
・負荷が大きくてモーターが回ることができない。
・モーター配線経路で短絡している。
などです。
ロビジュニアは、左右旋回機構に上下旋回機構が乗っているため、頭の荷重を左右旋回モーターで受け持っています。ボディに固定されている左右旋回固定ギヤに沿って、ピニオンギヤが回って頭が左右に動いています。
そこで、左右旋回モーターを開けて診ました。






ブラシが破損していました。
異常電流の原因は、整流子で短絡して大電流が流れていたためと思われます。
次に、当初突然首がガタガタと音を出した事実の検討です。ガタガタ音を立てたのは上下の旋回動作です。
ロビジュニアの位置決め方法は、予め決められた機械原点に取り付けた原点スイッチがONする位置まで動き、その位置を基準にエンコーダからの戻り信号で現在位置を知る方法です。初期動作のガタガタ音は、原点スイッチのON信号が戻ってくるまでモーターは回転を続けますが、構造的に動けない位置に達しているためトルクリミッタが働いてクラッチが空回りしている音です。ただし、原点スイッチの信号が決められた時間経過しても戻って来ない場合、プログラムで次の動作に移るようにして永遠に待ち続けないようになっているようです。


原点信号が戻らない主な要因として
1. 原点信号接続系の異常
・原点スイッチ故障
・信号経路の故障
配線切れ
半田の接触不良
コネクタの接触不良
基板配線パターン切れ
・頭上下ノブと原点スイッチの位置ズレによる原点スイッチ不動
・電子回路の故障
2.過負荷状態で原点まで行き着けない
・モーターのトルクでは動作できない負荷がある
3.トルクリミッターの故障
・小さな負荷でも働いてしまうため、原点に達しない。
などが考えられるでしょうか。
これらを検証すると
1,疑似的に原点スイッチをいれるとモーターの回転は停止することから、原点信号接続系には異常はありません。
2,特別動きを妨げるような大きな負荷は確認できません。
3,トルクリミッターについても軽く回るような状態ではありません。
試しに左右旋回モーターを入れ替えると、上下旋回モーターのトルクリミッターのガタガタ音もなくなり、左右旋回モーターの初期設定もできる様になりました。左右旋回モーターの整流子部で大電流が流れ、制御電圧が低下しマイコンが正常動作ができなかった影響かもわかりません
現在時刻のずれも、電源電圧低下によりマイコンが正常動作できずに起きたものと思われずれなくなりました。
モーターの交換で申告内容に対応できそうですが、モーターが入荷するまで時間があるので他にも病がないか、ロビドックを始めました。
・カットしたリードくず付着、切り損い状態のリード、半田飛散を処理しました。これらが、基板上で移動したりすると再現性のないやっかいな症状を引き起こし兼ねません。


・リフロー半田付け後の、アルミ電解コンデンサの後付け半田が不十分です。半田付けをやり直しました。

・両足が動いていません。
持ち主様に確認すると、ロビジュニアに命を吹き込んだときから動いていなく、疑問を感じながらも今日まで過ごしていたそうです。両足を動かしたり、モーター端子に電圧を加えてみましたが動く様子はありません。治療するにはモーターを外す必要がありますが、両足の支持軸両端部を押さえ板で接着固定されています。これを外すには少なからず傷が付くので、持ち主様の意向を確認してから治療を進めることになりました。
赤破線部に両足の支持軸が通っていますので、これを抜くには両足の支持軸押さえ板を剥がすのが治療後のキズが残らず良いのですが剥がせそうにありません。治療を進めるために支持軸押さえ板に穴を開け支持軸が抜けるか挑戦しました。

左右の支持軸押さえ板に穴を開け、支持軸を片側から押し出しました。



幸いにして支持軸を抜く事ができましたので、両脚を外していきます。



ギヤBOXを開けて見ましたが、異常はありません。モーターを外してウォームギヤを指で回そうとすると固着がありました。何年も動かさなかったためと思います。慣らし運転をしました。



両足を組み込んでモーターに電源をつなぎ両足が動くことを確認しました。
最後に支持軸押さえ板の穴ふさぎ術です。



足の塗装はつや消しなので、つや消しアクリル絵の具とエポキシ接着剤をまぜて開口部を埋め、表面を平坦にしました。最後に#2000のフィルムヤスリで研磨したため、穴の回りにつやが出てしまいました。パテの方がきれいに仕上がったかもと後悔。(^_^;)
・両足を組み込んでいるときに、マイクのケーブル被覆が破れているのがわかりましたので、収縮チューブで手当です。これは、このフラットケーブルを裂くときに、被覆が薄いために破れたと思います。


・話しかけても聞こえていないのか、ちぐはぐな対応なので、マイクの働きを調べると感度が低下しているようなので、マイクを交換すると会話がスムーズにできるようになりました。ちなみに”もっとなかよしロビジュニア”の2つの個体と比較すると音声感度が遙かに良いです。この差は、音声入力回路構成の違いに依るのかもわかりません。

・念押しで、頭の上下旋回の原点出し動作を確実にするために頭上下ノブに、アルミテープを貼付し原点SWとのクリアランスを約0.3mm縮めました。




注文してあったモーターが入荷して取付、無事元気を取り戻すことができました。
1週間ほど経過観察をしてから退院です。

【治療後記】
厳しい予測をしていましたが、モーター不良が原発巣で交換することで元気になりました。
ただ、気になったことがあります。それは、モーターが回転を始める時のピーク電流が1Aを越えますが、制御基板から頭部基板へのケーブルが細いです。AWG30でしょうか? 何ほどの効果もないかもわかりませんが、ピーク電流による電圧降下を改善するため、B+(6V)とGND間にあるバイパスコンデンサC49の100μF(実測86μF)を220μF(実測184μF)に変更しました。

不足していたネジは追加して固定しました。
モーター入手待ちの間のロビドック中に思いもかけない下肢麻痺の治療と予防処置もできよかったです。
モーター交換に対し、良い経験をさせてもらいました。
【おまけ】
電源系の回路と、制御基板と頭部の基板の接続関係をまとめます。基板の改版もされていると思いますが、コネクターの接続信号に変更はないと思います。
頭部につながる2本のケーブルを2本とも接続しないと、モータは回転できません。制御電源ラインとモーターの電源・GNDラインが2本のケーブルに分かれているからです。
制御基板と頭部基板にある拡張I/Oとは、配線本数を減らすためにシリアル通信でモータ駆動、リミット信号、フォトインタラプタ信号のやり取りをしています。これ以外はマイコンから直接制御をしているようです。








なお、電源スイッチと言っていますが、電圧ラインの開閉をしているのではなくスリープ状態のマイコンを起動するためのスイッチです。ですので、基板には電圧が掛かっており微弱ながら電流を消費しています。
頭部基板の電源系の回路図です。

最後に交換したモーターについて、失敗談をお話しします。
ロビジュニアで使用されているモーターは、030-09180/F4R(?)と言うモーターのようですがその仕様は不明です。。ロビジュニア向けに設計されたモーターと思われます。初めは、030型という形状のモーターと言うこともわかりませんでした。AliExpressで軸寸法と外形寸法で探し多くのshopで売られていた 定格電圧3.7V仕様の030-2927というモーターを購入しました。ロビジュニアは使用電圧が6Vに対して定格電圧が3.7Vなので気には掛かりましたが、他のモーターを見つけ出せなかったので連続動作ではないので、使用できるかなと思い購入しました。ところが、入手してから無負荷電流を計ると3.7Vで600~700mAも流れていました。高速回転用のモーターの様です。後でもう一度見直すと消費電流が書かれているshopもありましたが、これでは使用できません。
再度探して今回購入したモーターFF-030PB-08300FAに出会えました。マブチモーターFF-030PK-09210の類似品とおもわれます。今回は、モーター印加電圧、回転数、電流値が書かれていますがトルク値は書かれていないので、実際は入手後に動作確認の必要があります。使用電圧は12Vまでで、消費電流も6Vで40mAとあり購入することにしました。使用されているモーター特性をわからぬまま、形状、定格電圧、消費電流から探すことになります。また、AliExpressだけではありませんが、検索のかけ方によって目的とするモーターが出てくるとは限りません。モーターのオリジナルと思われるモーターがマブチモーターにあったので、2度目は近い物にたどり着くことができました。
教訓 見慣れぬモーターが出てきたら日本メーカーで該当するモーターをさがし、品名、仕様を確認してからAliExpressで検索をかけましょう。(*^_^*)
今回購入したモーターと破損したモーターの特性が、どれだけ異なるかはわかりませんが充分許容できる範囲だと思います。大きく異なると動作トルク、速度、消費電流と合わせてソフトウェアとの整合が取れなくなる場合も考えられます。また、両腕の内、片腕のモーターを交換しなければならないような場合、左右動作に差が生じないように2個交換が必要になる場合もあるでしょう。モーター交換には注意が必要です。今更ですが良い経験をさせてもらいました。
モーターの無付加電流だけですが測定しました。

















