
【申告要望内容】
訴え1,1週間程前から話さなくなりました。口のLEDは点灯しています。
落下、衝撃はありません。
訴え2,電源スイッチを入れると頭がガタガタ音がして、最後左向きで止まります。
右向きに止まる事は、ありません。
訴え3,たまに、時刻がずれることがありました。日々ずれるのではなく
突然ずれます。
訴え4,日時や時刻を聞いても応えてくれるときと、応えてくれないときが
ありますが、これは愛嬌でいいと思っています。
【初診】
私のカルテをご覧になって、遠く南の国から佐渡島まで来院されました。飛行機、車旅、船旅と長旅でしたが疲れもなく(?)やってきてくれました。
2017年タカラトミーから発売された人とのコミュニケーションに特化したパーソナルトークロボットです。
さて、体調の確認です。申告内容の通り、
口のLEDは、赤く点灯してもおはなしはしません。
スピーカ配線切れでしょうか?
スピーカの故障でしょうか?
スピーカのドライブ回路の故障でしょうか?
電源スイッチを入れると、頭が右を向き左を向きますが左の可動端でガタガタ音がして3~4秒で止まります。
位置センサーの信号が受け取れていないのでしょうか?
センサーの配線切れでしょうか?
センサーの故障でしょうか?
機構の損傷でしょうか?
頭部を開いて、検査を進めます。
頭部の開き方手順です。赤丸印のネジを外して行きます。






手順5までくると頭部の機構部品が分離できますので、コネクタで接続されている細い配線を切らないように気をつけてください。
訴え1、お話をしなくなりました。
手順8までくると、訴え1の要因の1つであるスピーカをチェックできます。今回は、スピーカのコイルが切れていてスピーカの交換で、元気におしゃべりを始めました。



手順10から、頭部の基板を外します。



手順14で前後に動く部品が外せますが、カム部を外すときに無理に開いて壊さないように注意が必要です。



手順16,17は、左右に頭を傾ける機構部です。


手順18から訴え2のガタガタ音の要因部位を確認できるようになります。





頭部の動きは、左右の回転、傾けの2つのモータとカムで実現しています。頭を左右に回すとカムにより少し上方向を向きます。これに、傾きが加わるとかわいらしくなります。こまかな表情までこだわった表情を作り出しています。



訴え2、ガタガタ音の検討です。画像でわかりやすくするため ”機構的回転止め”、”回転機構原点” を黒く色づけしています。


構造的には、胴体に固定されている大きなギヤがあります。これと噛み合う遊星ギヤが固定ギヤに沿って動くことにより、頭部が回転します。
固定ギヤには頭部がクルクル回らないように”機構的回転止め”A,Bがあります。頭部には”回転部ストップピン”があり想定外の状態になっても、A,Bの範囲内でしか動けません。ガタガタ音を立てている時は、”回転部ストップピン”が”機構的回転止め”Aに当たり、それでも回そうとする”頭部回転モータ”の力とこれ以上回らない遊星ギヤの間でせめぎ合います。その結果”頭部回転モータ”の過負荷を逃がすスリップ動作の音がガタガタ音として聞こえていると想像できます。4秒弱でガタガタ音がしなくなるのは、プログラムで所定時間内で目標値に達しないため動かすことを止めていると想像します。
しかし、なぜ左端まで回ってしまうのでしょうか?
ロビジュニアの位置制御(*1)は、機構的な原点位置からの距離をスリット板の回転量をフォトインタプリタ(*2)で検出し目標値と現在値との差分を計算しています。下図の目標値に対して現在地が近づき等しくなると目標値に達したことになります。

ここで、動きを位置制御方法の概念を念頭に見直すと
1.右に向けて動く。
マイコン → モータドライバ → モータ → 回転機構原点信号を得るまで。
2.右端で動きを止める。

回転機構原点は、破損していない
原点検出SWは正常に動作している
マイコンまでの接続は正常
3.左に向けて動く。
4.左端まで動き、ガタガタ音を立ててる。
目標値に達しないため止まらない?(位置検出ができない?)
①スリット板が異常?
→ 破損はない
②フォトインタラプタが破損?
→ 外観的な破損はない
③フォトインタラプタの取付状態に不具合が?


→ 位置決めピンもありスリット板との取付角度のズレはない
→ 取付にゆるみなどもない
→ フォトインタラプタのほこり除去目的にエアーブロー実施
④マイコンまでの接続に異常?
→ 外観的な配線切れなどはない
⑤モータに異常が?
→ モータを取り外し、正転、逆転をさせても正常に回転しました。
モータのブラシ状態を確認のため、分解オーバーホールを実施し
ました。幸いブラシも回転子にも大きな摩耗も確認されず、無水
エタノールで清掃し導電グリスを塗布しました。他のモータも、
同レベルと思い分解オーバーホールは見送りました。



4.4秒弱でガタガタ音がしなくなる。
プログラムで動きを止めていると思われます。
これと言った原発巣を確認できずに再度組み直して動作を確認すると、頭が左端まで動かずに正面位置で止まります。初期動作内容がわからないため、当初は左端まで動いてから正面まで戻るかと思い何度もモータ回転音やギヤの勘合状態を見ながら分解、組み立てを繰り返しましたが、やはり左端までは動かず正面で止まるのでこの動きで正しいと思い、状況を見守ることにしました。
原発巣の確認はできませんでしたが、症状からすると位置検出するための情報が戻っていない状態だったと思われます。
訴え3,突然、時刻がずれるに症状を検討します。
赤丸印のネジを外して行きます。





制御基板のコネクタの接続先は、下記の通りです。
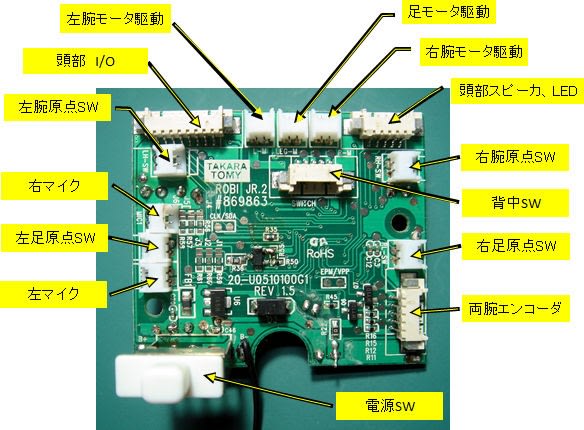
主な回路構成です。

時刻がずれるというと、疑うべきは時計の原発振である水晶振動子からです。波形の確認から始めます。




発信周波数も波形も特に異常とは言えませんが、”日々ずれていくのではなく突然ずれ” と言う症状なのでこれだけで正常とは、言い切れません。
そこで、荒療治ですが水晶振動子回りの回路を冷却して動作に変化が起きるか、試して見ました。



残念(?)ながら異常現象は、とらえることはできませんでした。
他方、どうなると時刻がずれるか検討すべくタカラトミーに仕様の問合せをしました。バッテリー電圧が十分であれば、可能性としては
・リセットスイッチを押した場合
・乾電池の交換時に時間がかかった場合(取説では30秒以上)
であり、電源スイッチはOFFにしてもずれないとの回答をいただきました。リセットスイッチは、プッシュ型のスイッチであり接触不良も考えにくく、その配線系にも目に見えるような異常は確認できませんでした。
発振回路に関しては、水晶振動子とコンデンサ2個だけが触ることができる部品です。遠くからの受診でもあり、保険で水晶振動子を交換しました。やや波形電圧値が上がっていますが、時刻が突然ずれる現象には無関係です。周波数も正しいです。


制御基板にはバックアップ用の電源を持っていないようなので、現在時刻がずれるか否かはマイコンにつながっている約4Vライン電圧とマイコン動作電圧との兼ね合いになりそうです。
マイコン電源ラインと思われる約4VのバイパスコンデンサC45は、220μFです。既に発売後7年経過しており容量も減っていると思い測定をすると187μFでした。おそらくアルミ電解コンデンサ容量の公差は±20%の部品を使用していると思いますので、このコンデンサは不良といえるほど劣化しているとは言えません。現状のマイコン電源ラインの変化を確認しました。測定条件は、全ての接続をして電源スイッチをOFFの状態で、バッテリーを抜きました。マイコンの動作電圧が何Vまでかはわかりませんが、仮の設定です。



この電源ラインは、頭部基板にもつながっています。メーカの取説に書かれている仕様の時間なので実力値以下の値にしているはずです。回路に異常がなければ上記の電圧変化から30秒後の電源電圧値はおよそ2.4Vになります。しかし、現実は10秒も保たず時刻を忘れてしまいます。何らかの原因で消費電流値が増加しているのかもわかりません。
そこで、少しでも電圧保持時間を長くするためC45の容量値を増やすことにしました。手持ちのコンデンサの容量値は、377μFでその時の電圧値の変化が次の画像です。


この個体の状態別乾電池の消費電流値です。
電源ON 待機状態時 9mA
電源OFF 待機状態時 5mA
手足を動かさずおしゃべりをしている時 60mA
電池交換時の現在時刻を忘れないようにするには、電源スイッチを切ってから行うと消費電流が減り忘れてしまうまでの時間が長くなります。これは、スイッチを切ることによって音声入力回路の電源を切っているからと思えます。他にもあるかもわかりません。
残念ながら、訴え3も症状が発生した状況がつかみきれず推測される事への対処療法で終わりましたが、後日持主より問診の回答があり電池交換後にずれたとのことでした。おそらく電圧が下がり忘れてしまったのかもわかりません。
訴え4,日時や時刻を聞いても応えてくれるときと、応えてくれないときがあります。
これは、ロビジュニアの言葉の認識力の実力で、故障ではありません。なかなか応えてくれません。粘り強く話しかけましょう。
【治療後記】
申告内容については、取りあえず症状は治まりました。しかし、ガタガタ音は原発巣が特定できていないため、治癒したとは言えないのがすっきりしないところです。このまま様子を見ていただくほかはありません。1週間ほど経過観察をしてから退院にします。
ロビジュニアは、おとなが楽しんでつくったロボットです。企画から構造設計、回路設計、ソフトウェア設計までとてもこだわって作られているのがわかります。ただ、コミニュケーションロボットとうたっていますが、なかなか言葉を理解してもらえないのが残念です。まだまだ、言語認識は難しいのでしょう。
ロビジュニアは、前のモデルと合わせて5万台を売り上げたとか。しかし、比較的おもちゃ病院の治療記録が少ないです。今後ますます、コミニュケーション型ロボットが増えてきますが、おもちゃ病院のドクターのレベルアップも求められてきますね。ただ、触れる部分も限られてきて治療対象外の患者さんになる日の方が早いかもわかりません。
そうそう、夜間ロビジュニアの寝言に驚いて目を覚ましたのは私だけでしょうか? (^_^;)
【補足説明】
*1:位置制御
モータで動くおもちゃでは、一般的に次のような方法で位置の制御をしています。
①車のタイヤのように、初めも終わりもなくただ回転をするだけ。(位置制御なし)
②動作範囲内にスイッチを設け、スイッチがオンしたら動作を変える。
③機構的な原点位置を設け、モータの回転量をセンサーでとらえ、現在位置を知る。
ロビジュニアは、③の方式を採用しています。人に似せた複雑な動きを実現させるため、少ない部品で自由度も高くソフトウェアで制御できるためです。
基本的な位置制御は、電源を入れたときに機構的な原点位置を探しに行きます。(初期設定)
次にモータの回転と連動するスリット版の回転を、フォトインタラプタ(*2)というセンサーでとらえます。センサーからのON/OFFの信号の数が機構原点からの距離に比例するので、位置を知ることができます。


*2:フォトインタラプタ






フォトインタラプタに起因する良くある誤動作としては、下記の事項があります。
・スリット板の目詰まり
・スリット板の回転が、モータの回転に追従できていない
・フォトインタラプタの発光部または受光部に光を遮るほこりなどがつき、
光が通らない
・フォトインタラプタとスリット板の位置関係がずれて、光がスリット板の
穴を通らない
フォトインタラプタを使用した物としては、初期のマウスがX、Y軸のボールの回転をとらえるために使用されていました。おもちゃのパソコンマウスにも使用されています。
*回路
今回の治療では、直接主回路には踏み込まないですみましたが、以前投稿した回路図を見直しましたので公開します。なお、見落としや間違いはあろうかと思いますのでご使用の際は注意してください。

レギュレータと思われる”145N”、”B1H”がありますが、該当すると思われるICの特定まではできませんでした。電源スイッチをOFFにするとマイコンからの出力で”B1H”の出力をOFFにすることができます。この出力は、音声入力回路の電源となっています。電源スイッチをOFFした場合、不要な消費電流を下げるためだと思います。
音声入力回路です。

おしゃべりは、マイコンから直接頭部のスピーカを駆動しています。
頭部の基板です。2chのモータドライバーと拡張 I/Oが実装されています。この拡張I/Oとマイコンとはシリアル通信をしています。この拡張I/Oは8x3個の入出力を設定できます。

















