








Scilab 11
さてさて、専門的なブログとなっていますが、皆さん理解していますか?
実は、私もあやしいです。
そもそも、複素平面 って 何?
ということや
ラプラス変換 演算子 など ????? かもしれません。
イメージしやすい例題で解説しても良いのですが、とりあえずscilabの使い方
という視点でやっています。
前回まで、伝達関数表現の 極配置 について見てきました。尾形先生の教科書ではこの後、4−3で「根軌跡上の任意の点に対応するゲインKの値を探索する」、4−4「非最小位相系の根軌跡」4−5「条件安定システムの根軌跡」4−6「むだ時間があるシステムの根軌跡」と続きます。
探した限り、matlabであるrlocusに対応したのがscilabでの対応が難しいため(やろうと思えばやれますが。。。)
ここらへんは飛ばします。(おまえわかってないから飛ばすのか! という声が聞こえますが)
で、根軌跡によって 当ブログの本題の制御系の設計をやってみましょう。
つまり参考書は4−7「制御システムの性能を補償するための根軌跡によるアプローチ」です。
制御システムは このやり方は1)モデルが与えられている そして 2)根軌跡がわかるので 3)補償する制御器を与えてやり 4)MATLABやscilabで評価してやる。
ということになります。 具体的に例題で見ていきましょう。
4−7−1 として 根軌跡による 位相進み補償がまず最初です。。。
zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzz
寝てますね
あきらめましょう
結局、設計は位相進み補償、位相進み遅れ補償、などを机上でやり
ステップ応答で比較しているのに上記4)をやっているということです。
例題4−13の結果を示して今回は終わりにします。すみません
s=poly(0,'s');
-->Ht=1.06/(s*(s+1)*(s+2));
-->H=syslin('c',Ht);
-->evans(H,100);
として、まずHtという補償前の前向き伝達関数を与えてその根軌跡を見る。
すると
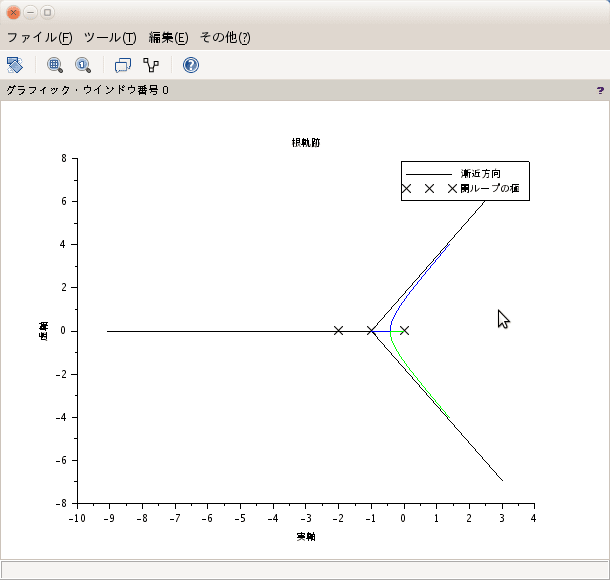
こんな感じの根軌跡が得られる。
補償器を設計して(設計は尾形先生の本に譲る)
->Gt=0.9656*(s+0.05)/(s+0.005);
これが補償器
-->GH=Gt*Ht;
直列にして
-->G=syslin('c',GH);
-->clf()
-->evans(G,100);
警告: evans: 曲線は最初の 2000 個の離散点に丸められています。
あれ まあ良いか
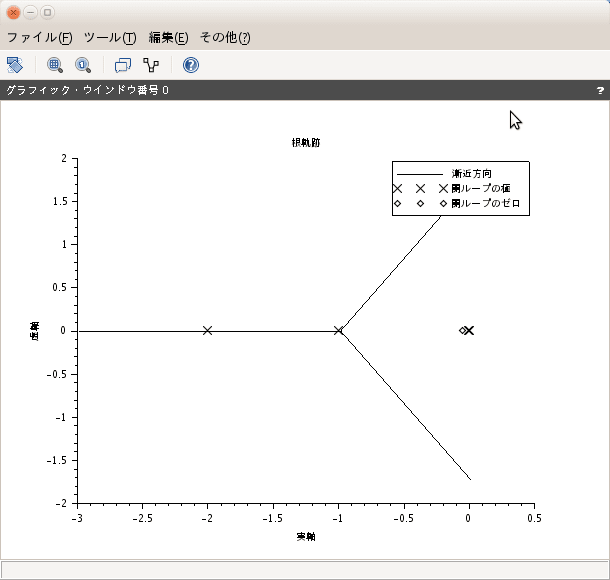
となり補償後のものが得られました。この評価は、ステップ応答の比較をしてみると
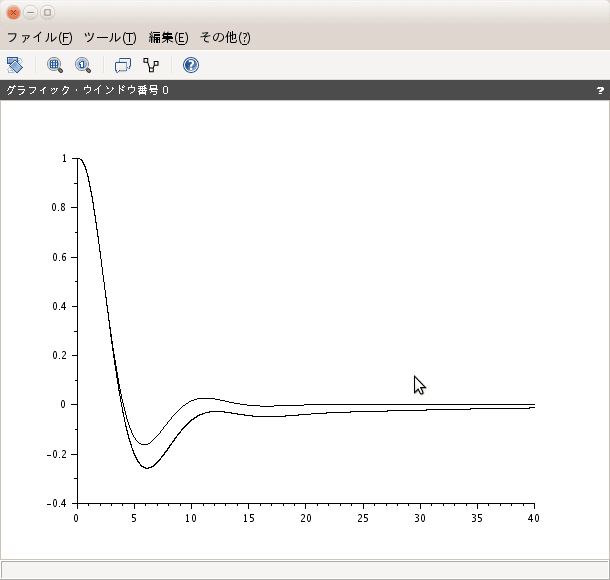
あらら 何かおかしい
今回はここまで 修正してまたアップします。
さてさて、専門的なブログとなっていますが、皆さん理解していますか?
実は、私もあやしいです。
そもそも、複素平面 って 何?
ということや
ラプラス変換 演算子 など ????? かもしれません。
イメージしやすい例題で解説しても良いのですが、とりあえずscilabの使い方
という視点でやっています。
前回まで、伝達関数表現の 極配置 について見てきました。尾形先生の教科書ではこの後、4−3で「根軌跡上の任意の点に対応するゲインKの値を探索する」、4−4「非最小位相系の根軌跡」4−5「条件安定システムの根軌跡」4−6「むだ時間があるシステムの根軌跡」と続きます。
探した限り、matlabであるrlocusに対応したのがscilabでの対応が難しいため(やろうと思えばやれますが。。。)
ここらへんは飛ばします。(おまえわかってないから飛ばすのか! という声が聞こえますが)
で、根軌跡によって 当ブログの本題の制御系の設計をやってみましょう。
つまり参考書は4−7「制御システムの性能を補償するための根軌跡によるアプローチ」です。
制御システムは このやり方は1)モデルが与えられている そして 2)根軌跡がわかるので 3)補償する制御器を与えてやり 4)MATLABやscilabで評価してやる。
ということになります。 具体的に例題で見ていきましょう。
4−7−1 として 根軌跡による 位相進み補償がまず最初です。。。
zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzz
寝てますね
あきらめましょう
結局、設計は位相進み補償、位相進み遅れ補償、などを机上でやり
ステップ応答で比較しているのに上記4)をやっているということです。
例題4−13の結果を示して今回は終わりにします。すみません
s=poly(0,'s');
-->Ht=1.06/(s*(s+1)*(s+2));
-->H=syslin('c',Ht);
-->evans(H,100);
として、まずHtという補償前の前向き伝達関数を与えてその根軌跡を見る。
すると
こんな感じの根軌跡が得られる。
補償器を設計して(設計は尾形先生の本に譲る)
->Gt=0.9656*(s+0.05)/(s+0.005);
これが補償器
-->GH=Gt*Ht;
直列にして
-->G=syslin('c',GH);
-->clf()
-->evans(G,100);
警告: evans: 曲線は最初の 2000 個の離散点に丸められています。
あれ まあ良いか
となり補償後のものが得られました。この評価は、ステップ応答の比較をしてみると
あらら 何かおかしい
今回はここまで 修正してまたアップします。