Scilab 10
根軌跡の続き
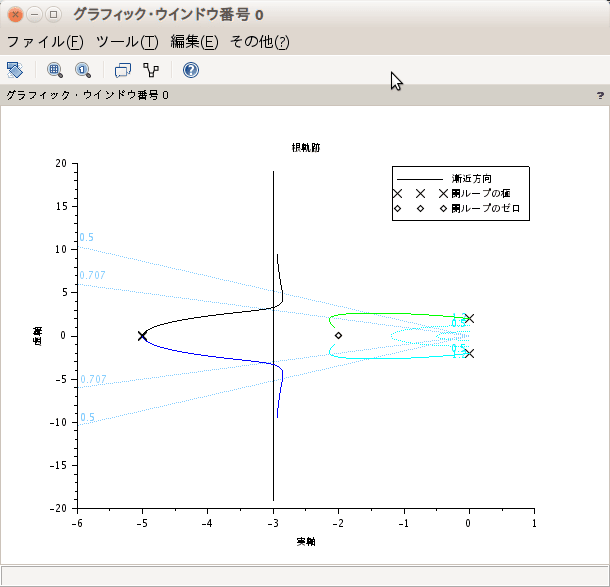
Ht=(s+2)^2/(s^2+4)/(s+5)^2;
-->H=syslin('c',Ht);
-->evans(H,100);
-->sgrid
とすることで このような極座標グリッド線が入ったグラフがかける
これはMATLABとほぼ同じ
ただし、デフォルトの色がなあ ちょっと見にくい
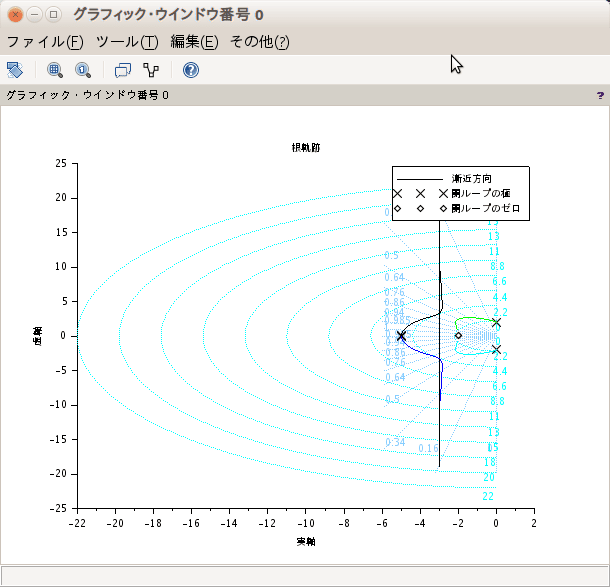
尾形先生のprogram4−10などにより、減衰ζ=0.5 と0.707の放射線と
ω=0.5、1,2のみの円を示したれば
>sgrid([0.5,0.707],[0.5,1.2]);
でこうなる。
ζ:減衰は複素平面上で角度φの角度を持った放射線になる。またωは一定半径の円となります。
ちょっといびつ

根軌跡の続き
Ht=(s+2)^2/(s^2+4)/(s+5)^2;
-->H=syslin('c',Ht);
-->evans(H,100);
-->sgrid
とすることで このような極座標グリッド線が入ったグラフがかける
これはMATLABとほぼ同じ
ただし、デフォルトの色がなあ ちょっと見にくい
尾形先生のprogram4−10などにより、減衰ζ=0.5 と0.707の放射線と
ω=0.5、1,2のみの円を示したれば
>sgrid([0.5,0.707],[0.5,1.2]);
でこうなる。
ζ:減衰は複素平面上で角度φの角度を持った放射線になる。またωは一定半径の円となります。
ちょっといびつ