








Scilab6
3 過渡応答解析 (その2)
尾形先生の本は、過渡応答解析について例題がたくさんある。
前回のシステムに加え、さらに高次のシステム、伝達関数表現ではなく、
状態空間表現でのステップ応答などやフィードバックがある場合など豊富に解説している。
さて、その中で一つやってみよう。
2入力2出力の状態空間表現では、4つの伝達関数があり、4つの応答がそれぞれ得られる。
-->plot2d([t',t'],[(csim('step',t,des2ss(A,B,C,D,E)))',0*t'])
警告: csim: 入力引数 #1 は連続時間系で指定してください.
!--error 10000
csim: 入力引数 #1 の型が間違っています: SIMOを指定してください.
at line 57 of function csim called by :
plot2d([t',t'],[(csim('step',t,des2ss(A,B,C,D,E)))',0*t'])
そうなのか、csimは1入力なのですね。
matlabの場合、step(A,B,C,D)で4つのグラフができる。
うーん、これはmatlabに軍配か!
では
-->tt=ss2tf(Sc);
-->tt
tt =
- 1 + s - 1.776D-15 + s
----------- -------------
2 2
6.5 + s + s 6.5 + s + s
7.5 + s 6.5
----------- -----------
2 2
6.5 + s + s 6.5 + s + s
として、4つの伝達関数としてあげて
ひとつひとつ
for i=1:2
for j=1:2
plot2d([t',t'],[(csim('step',t,tf2ss(tt(i,j))))',0*t']);
end;end;
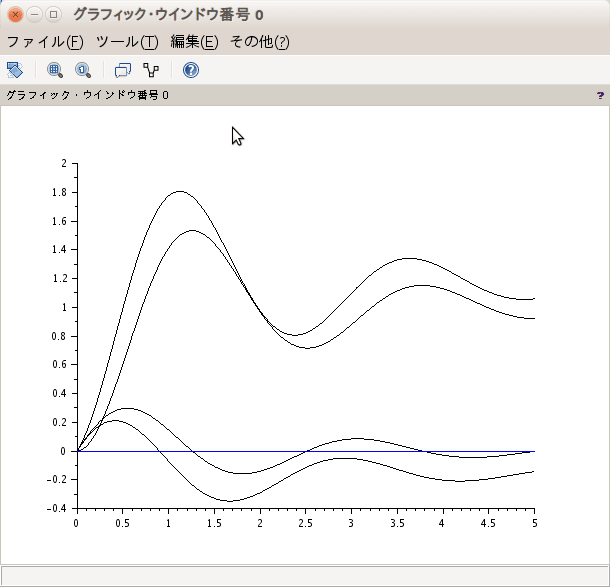
ははは 出来た
でも、色がおなじか
まあ、ループの中に色を変えるコマンドを入れれば良いかな
matlabは小さいウインドで4つできるが
まあ、今日はここまで
3 過渡応答解析 (その2)
尾形先生の本は、過渡応答解析について例題がたくさんある。
前回のシステムに加え、さらに高次のシステム、伝達関数表現ではなく、
状態空間表現でのステップ応答などやフィードバックがある場合など豊富に解説している。
さて、その中で一つやってみよう。
2入力2出力の状態空間表現では、4つの伝達関数があり、4つの応答がそれぞれ得られる。
-->plot2d([t',t'],[(csim('step',t,des2ss(A,B,C,D,E)))',0*t'])
警告: csim: 入力引数 #1 は連続時間系で指定してください.
!--error 10000
csim: 入力引数 #1 の型が間違っています: SIMOを指定してください.
at line 57 of function csim called by :
plot2d([t',t'],[(csim('step',t,des2ss(A,B,C,D,E)))',0*t'])
そうなのか、csimは1入力なのですね。
matlabの場合、step(A,B,C,D)で4つのグラフができる。
うーん、これはmatlabに軍配か!
では
-->tt=ss2tf(Sc);
-->tt
tt =
- 1 + s - 1.776D-15 + s
----------- -------------
2 2
6.5 + s + s 6.5 + s + s
7.5 + s 6.5
----------- -----------
2 2
6.5 + s + s 6.5 + s + s
として、4つの伝達関数としてあげて
ひとつひとつ
for i=1:2
for j=1:2
plot2d([t',t'],[(csim('step',t,tf2ss(tt(i,j))))',0*t']);
end;end;
ははは 出来た
でも、色がおなじか
まあ、ループの中に色を変えるコマンドを入れれば良いかな
matlabは小さいウインドで4つできるが
まあ、今日はここまで





