








SD : SDSQXNE-032G-GN6MA [SANDISK]
AD : AD-PD6001A 5V/3A [Akizuki]
Case : Rspberry Pi 5 Case Red/White [SC1159]
Fan : Active Cooler [SC1148]
Camera : Raspberry Pi HQ Camera [SC0818]
Cable : RPI 5 Camera Cable 500mm [SC1130]
Lens : CGL 16mm Tele-photo Lens [SC0123]
PC : Windows10 Pro 64bit Version 22H2
$ uname -a
Linux raspberrypi 6.6.20+rpt-rpi-2712 #1 SMP PREEMPT Debian 1:6.6.20-1+rpt1 (2024-03-07) aarch64 GNU/Linux
$ lsb_release -a
No LSB modules are available. Distributor ID: Debian Description: Debian GNU/Linux 12 (bookworm) Release: 12 Codename: bookworm
$ sudo nano /sbin/dphys-swapfile
$ sudo nano /etc/dphys-swapfile
$ sudo reboot
$ free -m
total used free shared buff/cache available
Mem: 8052 593 6846 36 745 7459
Swap: 4095 0 4095
$ wget https://github.com/Qengineering/Install-OpenCV-Raspberry-Pi-64-bits/raw/main/OpenCV-4-9-0.sh
$ sudo chmod 755 ./OpenCV-4-9-0.sh
$ ./OpenCV-4-9-0.sh
# Bookworm
$ sudo apt-get install qtbase5-dev
$ cd ~
$ git clone --depth=1 https://github.com/opencv/opencv.git
$ git clone --depth=1 https://github.com/opencv/opencv_contrib.git
$ cd ~/opencv
$ mkdir build
$ cd build
$ cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D OPENCV_EXTRA_MODULES_PATH=~/opencv_contrib/modules \
-D ENABLE_NEON=ON \
-D WITH_OPENMP=ON \
-D WITH_OPENCL=OFF \
-D BUILD_TIFF=ON \
-D WITH_FFMPEG=ON \
-D WITH_TBB=ON \
-D BUILD_TBB=ON \
-D WITH_GSTREAMER=ON \
-D BUILD_TESTS=OFF \
-D WITH_EIGEN=OFF \
-D WITH_V4L=ON \
-D WITH_LIBV4L=ON \
-D WITH_VTK=OFF \
-D WITH_QT=OFF \
-D WITH_PROTOBUF=ON \
-D OPENCV_ENABLE_NONFREE=ON \
-D INSTALL_C_EXAMPLES=OFF \
-D INSTALL_PYTHON_EXAMPLES=OFF \
-D PYTHON3_PACKAGES_PATH=/usr/lib/python3/dist-packages \
-D OPENCV_GENERATE_PKGCONFIG=ON \
-D BUILD_EXAMPLES=OFF ..
$ make -j4
$ sudo make install
$ sudo ldconfig
$ make clean
$ sudo apt-get update
$ sudo apt-get upgrade
$ python
>>> import cv2
>>> print( cv2.getBuildInformation() )
General configuration for OpenCV 4.9.0-dev =====================================
Version control: 52f3f5a
Extra modules:
Location (extra): /home/pi/opencv_contrib/modules
Version control (extra): 9373b72
Platform:
Timestamp: 2024-03-25T04:33:16Z
Host: Linux 6.6.20+rpt-rpi-2712 aarch64
CMake: 3.25.1
CMake generator: Unix Makefiles
CMake build tool: /usr/bin/gmake
Configuration: RELEASE
CPU/HW features:
Baseline: NEON FP16
required: NEON
Dispatched code generation: NEON_DOTPROD NEON_FP16 NEON_BF16
requested: NEON_FP16 NEON_BF16 NEON_DOTPROD
NEON_DOTPROD (1 files): + NEON_DOTPROD
NEON_FP16 (2 files): + NEON_FP16
NEON_BF16 (0 files): + NEON_BF16
C/C++:
Built as dynamic libs?: YES
C++ standard: 11
C++ Compiler: /usr/bin/c++ (ver 12.2.0)
C++ flags (Release): -fsigned-char -W -Wall -Wreturn-type -Wnon-virtual-dtor -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wundef -Winit-self -Wpointer-arith -Wshadow -Wsign-promo -Wuninitialized -Wsuggest-override -Wno-delete-non-virtual-dtor -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -fvisibility-inlines-hidden -fopenmp -O3 -DNDEBUG -DNDEBUG
C++ flags (Debug): -fsigned-char -W -Wall -Wreturn-type -Wnon-virtual-dtor -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wundef -Winit-self -Wpointer-arith -Wshadow -Wsign-promo -Wuninitialized -Wsuggest-override -Wno-delete-non-virtual-dtor -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -fvisibility-inlines-hidden -fopenmp -g -O0 -DDEBUG -D_DEBUG
C Compiler: /usr/bin/cc
C flags (Release): -fsigned-char -W -Wall -Wreturn-type -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wmissing-prototypes -Wstrict-prototypes -Wundef -Winit-self -Wpointer-arith -Wshadow -Wuninitialized -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -fopenmp -O3 -DNDEBUG -DNDEBUG
C flags (Debug): -fsigned-char -W -Wall -Wreturn-type -Waddress -Wsequence-point -Wformat -Wformat-security -Wmissing-declarations -Wmissing-prototypes -Wstrict-prototypes -Wundef -Winit-self -Wpointer-arith -Wshadow -Wuninitialized -Wno-comment -Wimplicit-fallthrough=3 -Wno-strict-overflow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fdata-sections -fvisibility=hidden -fopenmp -g -O0 -DDEBUG -D_DEBUG
Linker flags (Release): -Wl,--gc-sections -Wl,--as-needed -Wl,--no-undefined
Linker flags (Debug): -Wl,--gc-sections -Wl,--as-needed -Wl,--no-undefined
ccache: NO
Precompiled headers: NO
Extra dependencies: dl m pthread rt
3rdparty dependencies:
OpenCV modules:
To be built: aruco bgsegm bioinspired calib3d ccalib core datasets dnn dnn_objdetect dnn_superres dpm face features2d flann freetype fuzzy gapi hdf hfs highgui img_hash imgcodecs imgproc intensity_transform line_descriptor mcc ml objdetect optflow phase_unwrapping photo plot python3 quality rapid reg rgbd saliency shape signal stereo stitching structured_light superres surface_matching text tracking ts video videoio videostab wechat_qrcode xfeatures2d ximgproc xobjdetect xphoto
Disabled: world
Disabled by dependency: -
Unavailable: alphamat cannops cudaarithm cudabgsegm cudacodec cudafeatures2d cudafilters cudaimgproc cudalegacy cudaobjdetect cudaoptflow cudastereo cudawarping cudev cvv java julia matlab ovis python2 sfm viz
Applications: perf_tests apps
Documentation: NO
Non-free algorithms: YES
GUI: GTK3
GTK+: YES (ver 3.24.38)
GThread : YES (ver 2.74.6)
GtkGlExt: NO
Media I/O:
ZLib: /usr/lib/aarch64-linux-gnu/libz.so (ver 1.2.13)
JPEG: /usr/lib/aarch64-linux-gnu/libjpeg.so (ver 62)
WEBP: /usr/lib/aarch64-linux-gnu/libwebp.so (ver encoder: 0x020f)
PNG: /usr/lib/aarch64-linux-gnu/libpng.so (ver 1.6.39)
TIFF: build (ver 42 - )
JPEG 2000: build (ver 2.5.0)
OpenEXR: build (ver 2.3.0)
HDR: YES
SUNRASTER: YES
PXM: YES
PFM: YES
Video I/O:
DC1394: NO
FFMPEG: YES
avcodec: YES (59.37.100)
avformat: YES (59.27.100)
avutil: YES (57.28.100)
swscale: YES (6.7.100)
avresample: NO
GStreamer: YES (1.22.0)
v4l/v4l2: YES (linux/videodev2.h)
Parallel framework: TBB (ver 2021.11 interface 12110)
Trace: YES (with Intel ITT)
Other third-party libraries:
Lapack: NO
Custom HAL: YES (carotene (ver 0.0.1, Auto detected))
Protobuf: build (3.19.1)
Flatbuffers: builtin/3rdparty (23.5.9)
Python 3:
Interpreter: /usr/bin/python3 (ver 3.11.2)
Libraries: /usr/lib/aarch64-linux-gnu/libpython3.11.so (ver 3.11.2)
Limited API: NO
numpy: /usr/lib/python3/dist-packages/numpy/core/include (ver 1.24.2)
install path: /usr/lib/python3/dist-packages/cv2/python-3.11
Python (for build): /usr/bin/python3
Java:
ant: NO
Java: NO
JNI: NO
Java wrappers: NO
Java tests: NO
Install to: /usr/local
-----------------------------------------------------------------
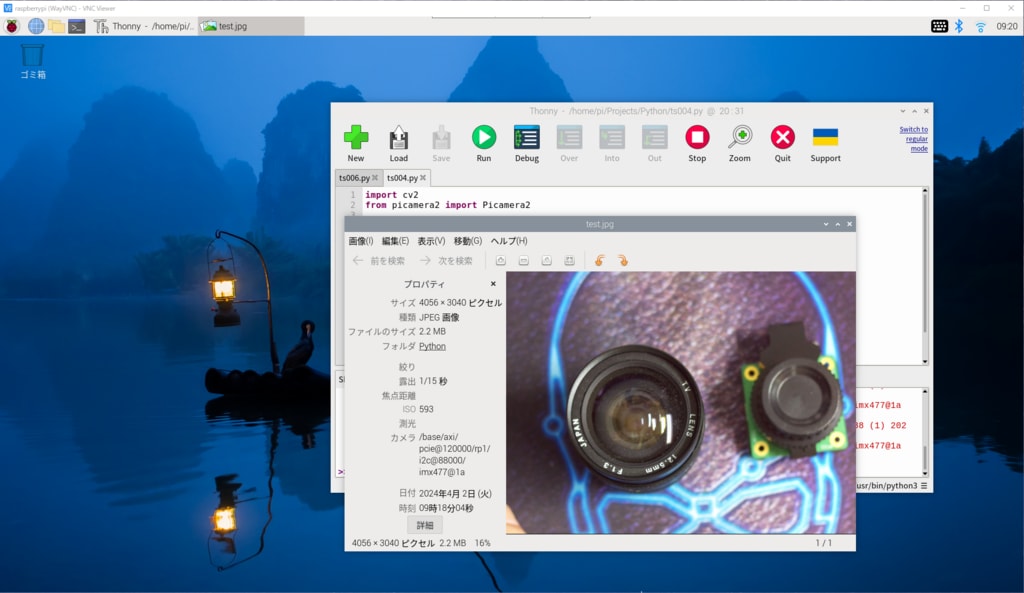
import cv2
from picamera2 import Picamera2
camera = Picamera2()
camera.configure(camera.create_preview_configuration(main={
"format": 'XRGB8888',
"size": (640, 480)
}))
camera.start()
#camera.set_controls({'AfMode': controls.AfModeEnum.Continuous})
image = camera.capture_array()
channels = 1 if len(image.shape) == 2 else image.shape[2]
if channels == 1:
image = cv2.cvtColor(image, cv2.COLOR_GRAY2BGR)
if channels == 4:
image = cv2.cvtColor(image, cv2.COLOR_BGRA2BGR)
cv2.imwrite('test.jpg', image)
◆Raspberry Pi用のローリングシャッターとグローバルシャッターカメラ比較
1.準備RP : Raspberry Pi 5 8GB
SD : SDSQXNE-032G-GN6MA [SANDISK]
AD : AD-PD6001A 5V/3A [Akizuki]
Case : Rspberry Pi 5 Case Red/White [SC1159]
Fan : Active Cooler [SC1148]
Camera 1 : Raspberry Pi HQ Camera [SC0818]
Camera 2 : Raspberry Pi Global Shutter Cam [SC0715]
Cable : RPI 5 Camera Cable 500mm [SC1130]
Lens : CGL 16mm Tele-photo Lens [SC0123]
PC : Windows10 Pro 64bit Version 22H2
2.カメラ接続

3.Raspberry Pi HQ Cameraサンプル画像


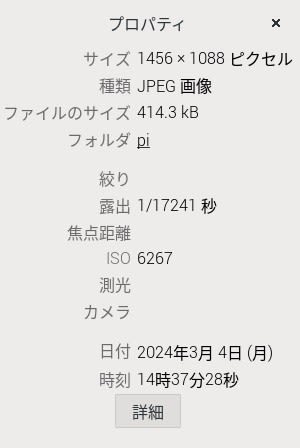
4.Raspberry Pi Global Shutter Cameraサンプル画像

─以上─
◆Raspberry Pi 5 にOSをインストールする。初期設定はSSH, VNC接続で進める手順。
1.準備
RP: Raspberry Pi 5 8GB
SD: SDSQXNE-032G-GN6MA [SANDISK]
AD:AD-PD6001A 5V/3A [Akizuki]
PC: Windows10 Pro 64bit Version 22H2
Tool:
SD Card Formatter 5.0.2
Raspberry Pi Imager 1.8.5
TeraTerm Version 4.106(SVN# 9298)
VNC Viwer 6.21.1109(r45988)x64(Nov 9 2021 13:14:09)
2.Raspberry Pi Imagerダウンロードインストール
ダウンロード先
imager_1.8.5.exeを起動して、インストール
3.SDカード書込み
PCにフォーマット済みのmicroSDカードを接続
SDカードのスペックは64GB以上,Class10,UHS-I U3, V30, A2が理想
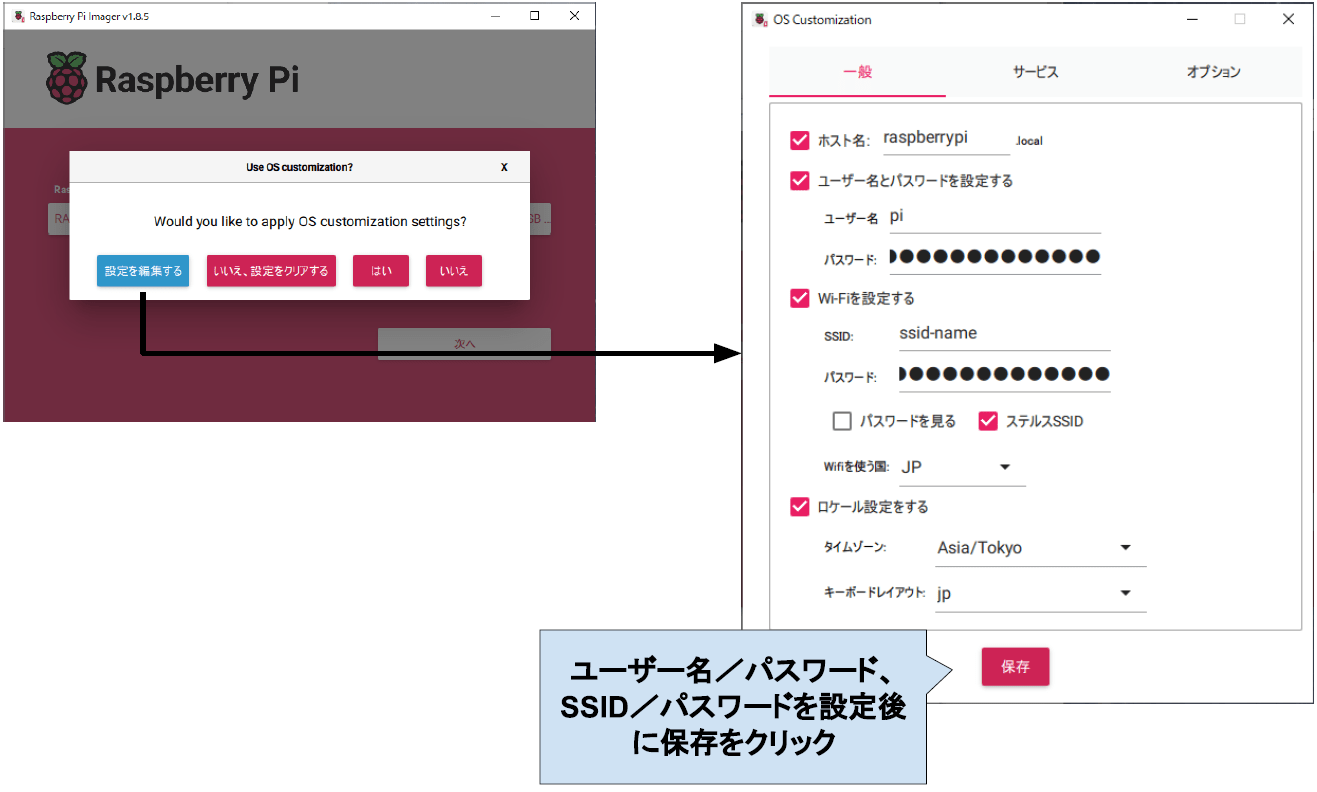
Raspberry Pi Imagerを起動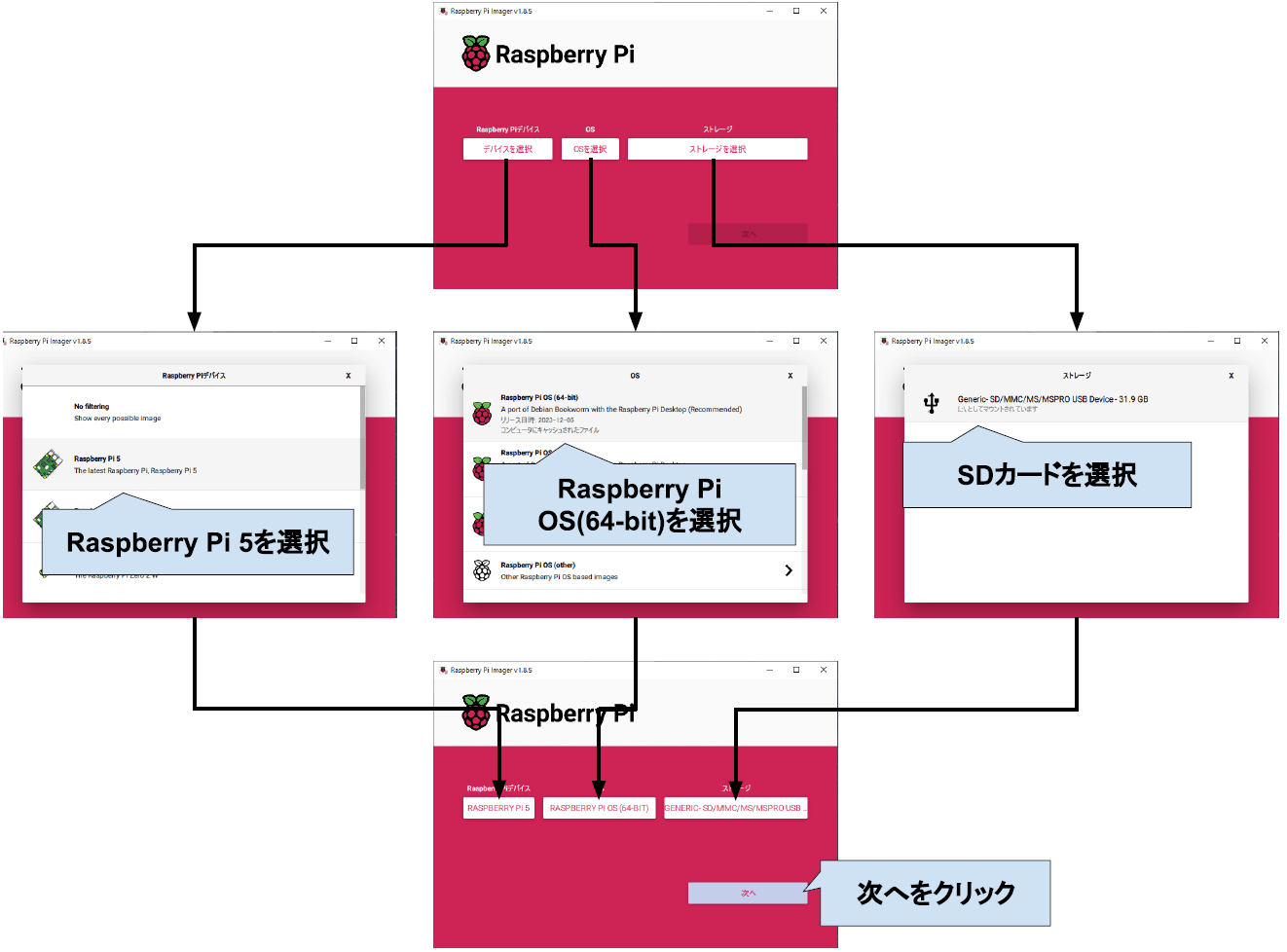
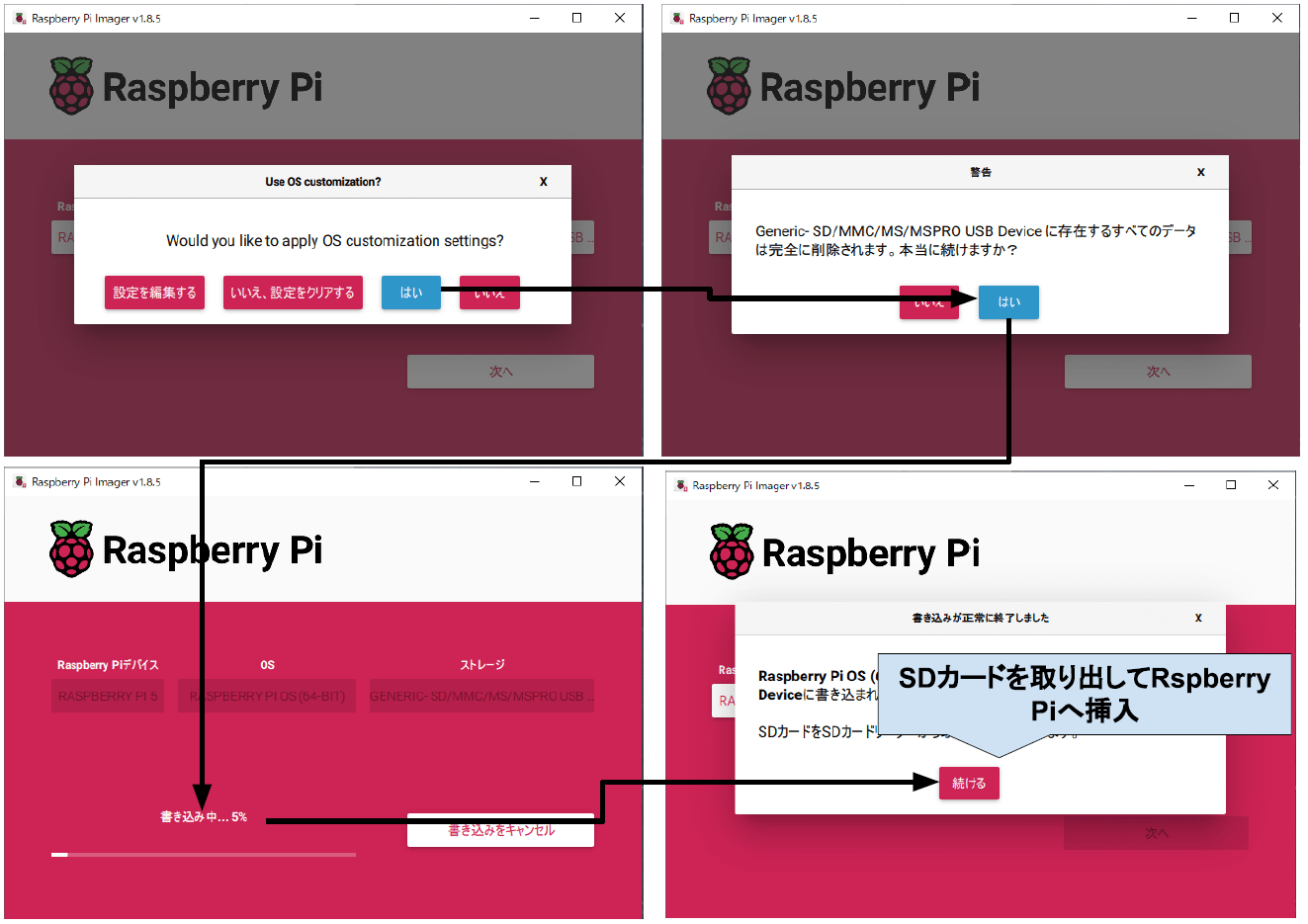
4.通電
Raspberry PiにSDカードを挿入
Raspberry PiにUSB-C対応ACアダプターを接続
※2024年2月現在、国内で5V/5A出力できるUSB-C対応ACアダプターは存在しない
PCは、Raspberry Piと同じWiFiに接続
5.SSH接続
PCからRaspberry Piの設定を実行
Tera Termを起動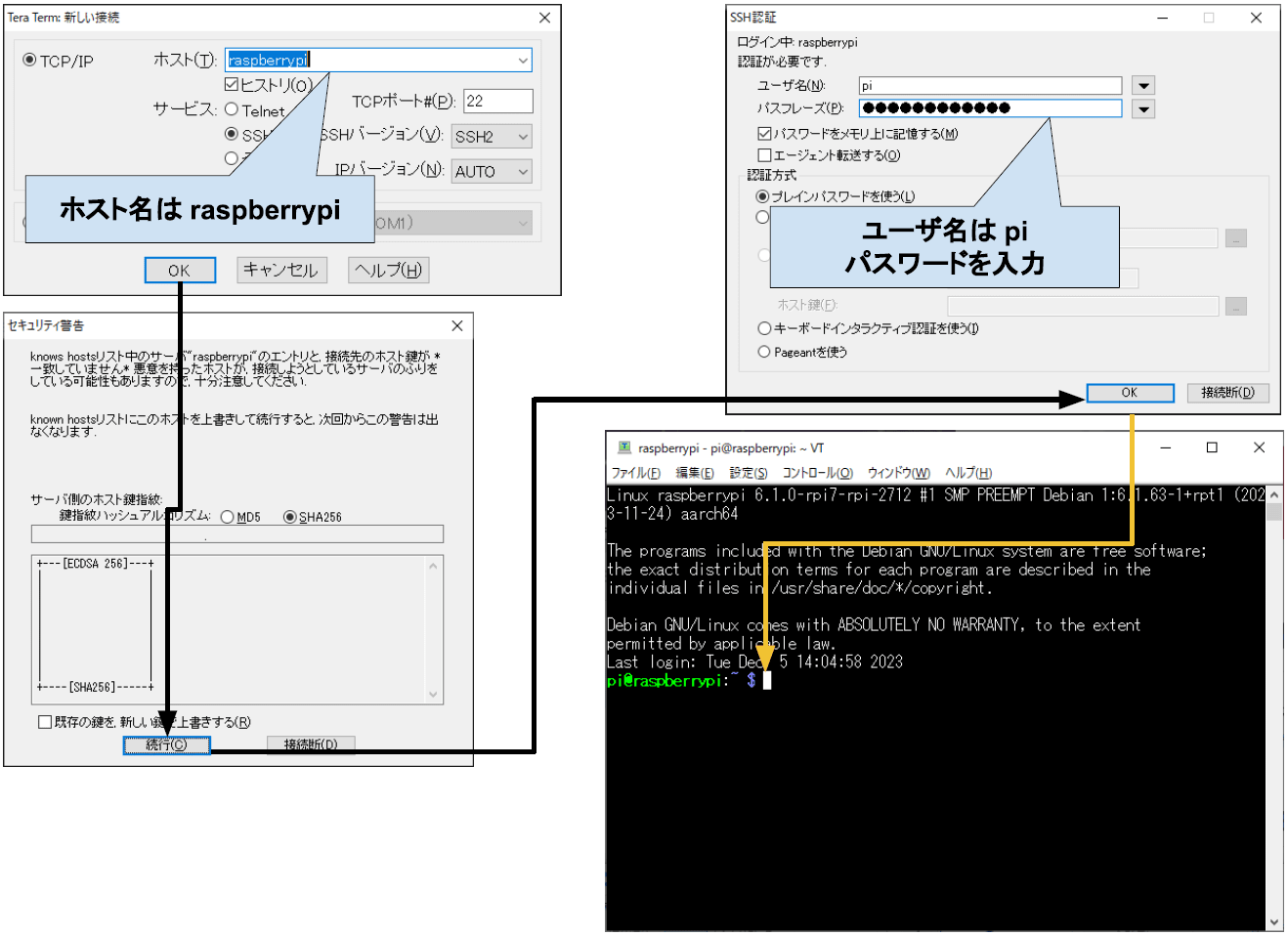
6.アップデート
$sudo apt update && sudo apt upgrade -y
※自分の環境では、30分弱必要
7.基本設定
$sudo raspi-config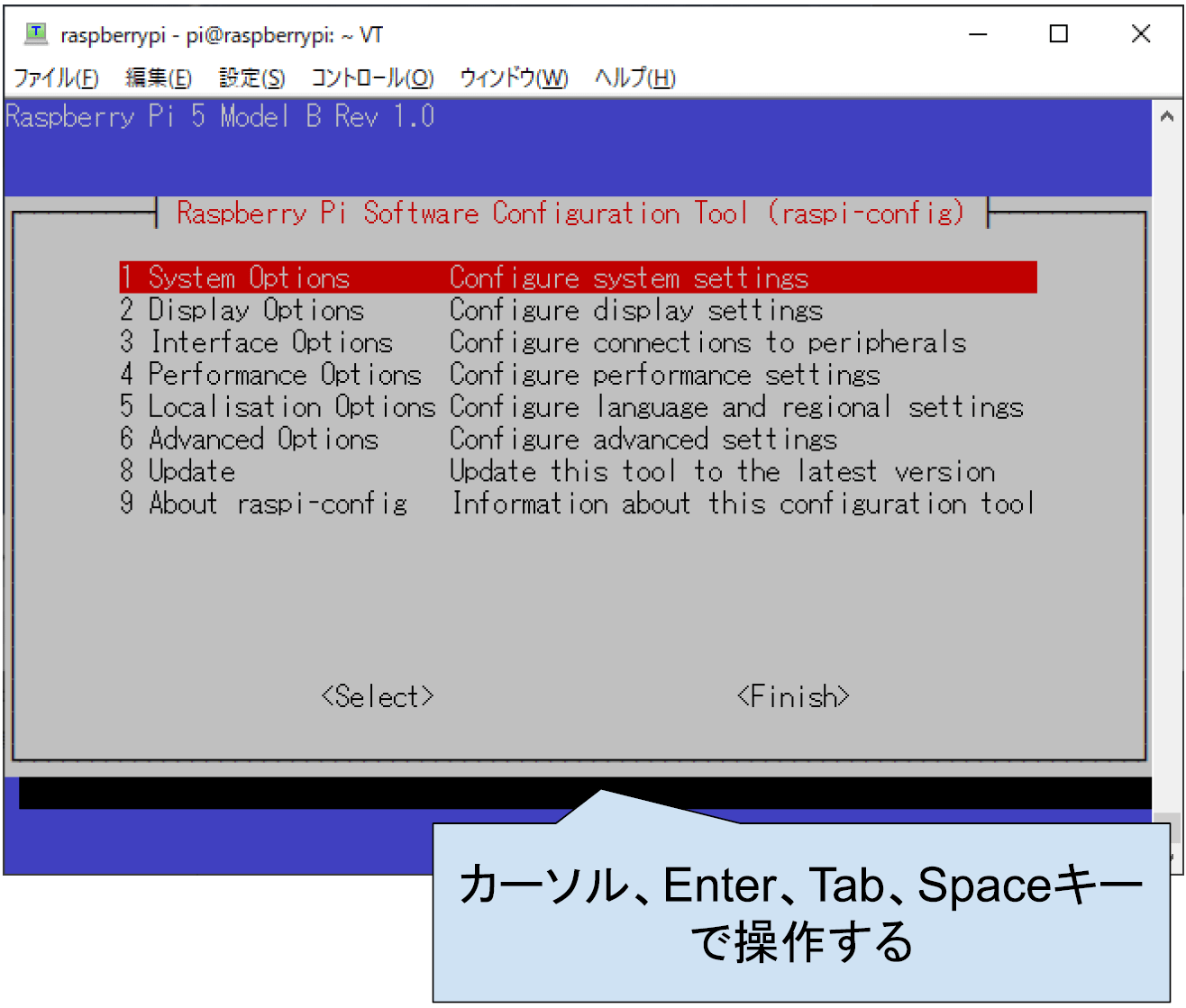
1 System Options → S5 Boot / Auto Login → B4 Desktop Autologin
2 Display Options → D3 VNC Resolution → 1920x1080
3 Interface Options → I2 VNC →
5 Localisation Options
→ L1 Locale → ja_JP.UTF-8 UTF-8 → ja_JP,UTF-8
→ L2 Timezone → Asia → Tokyo
→ L3 Keyboard → Generic 105-key PC → Japanese(OADG 109A) →
The default for the keyboard layout → No compose key
→ L4 WLAN Country → JP Japanese
再起動を実行
Tera Termにて再度、SSH接続
$ip address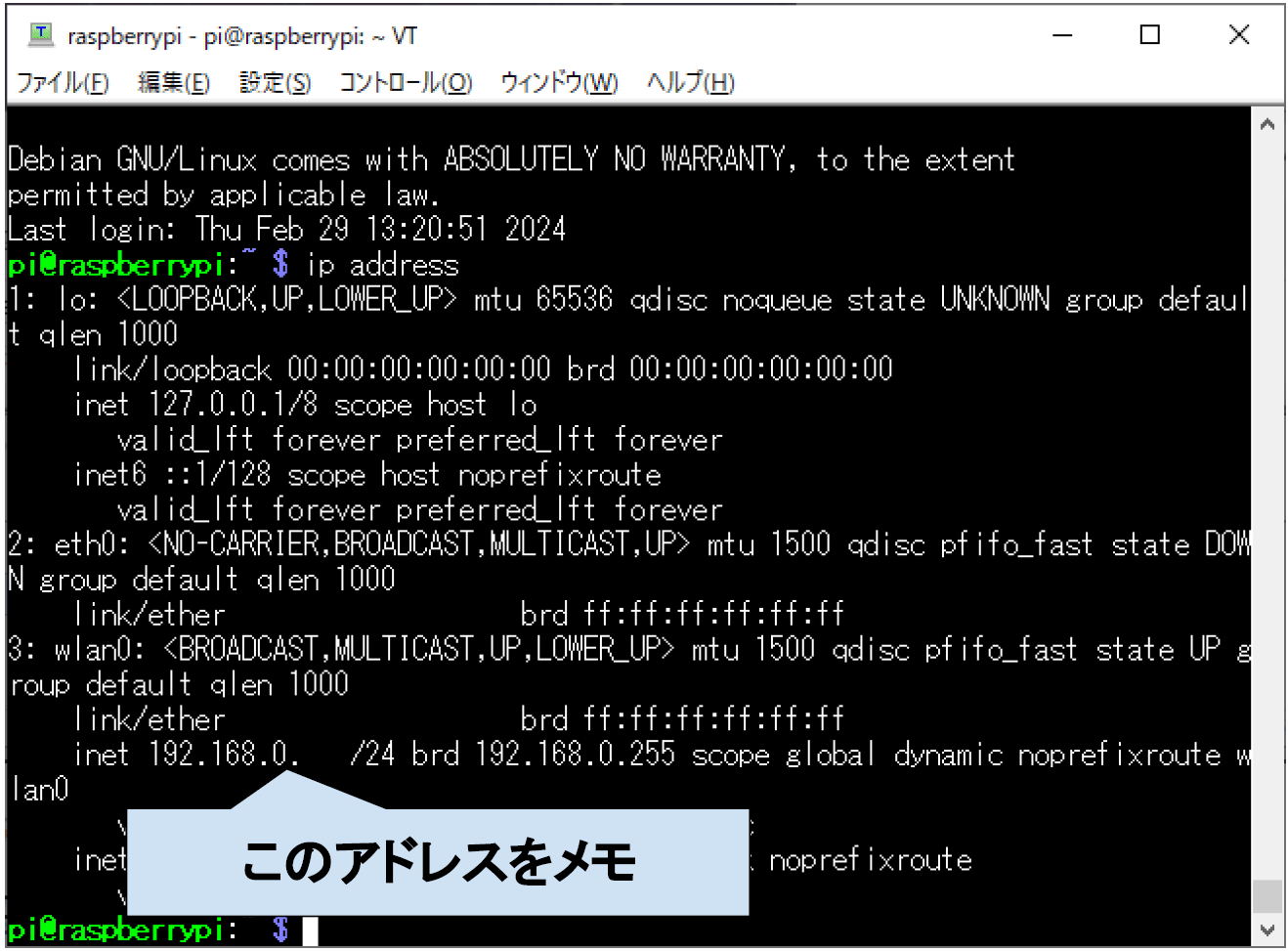
PCで、VNC Viwer を起動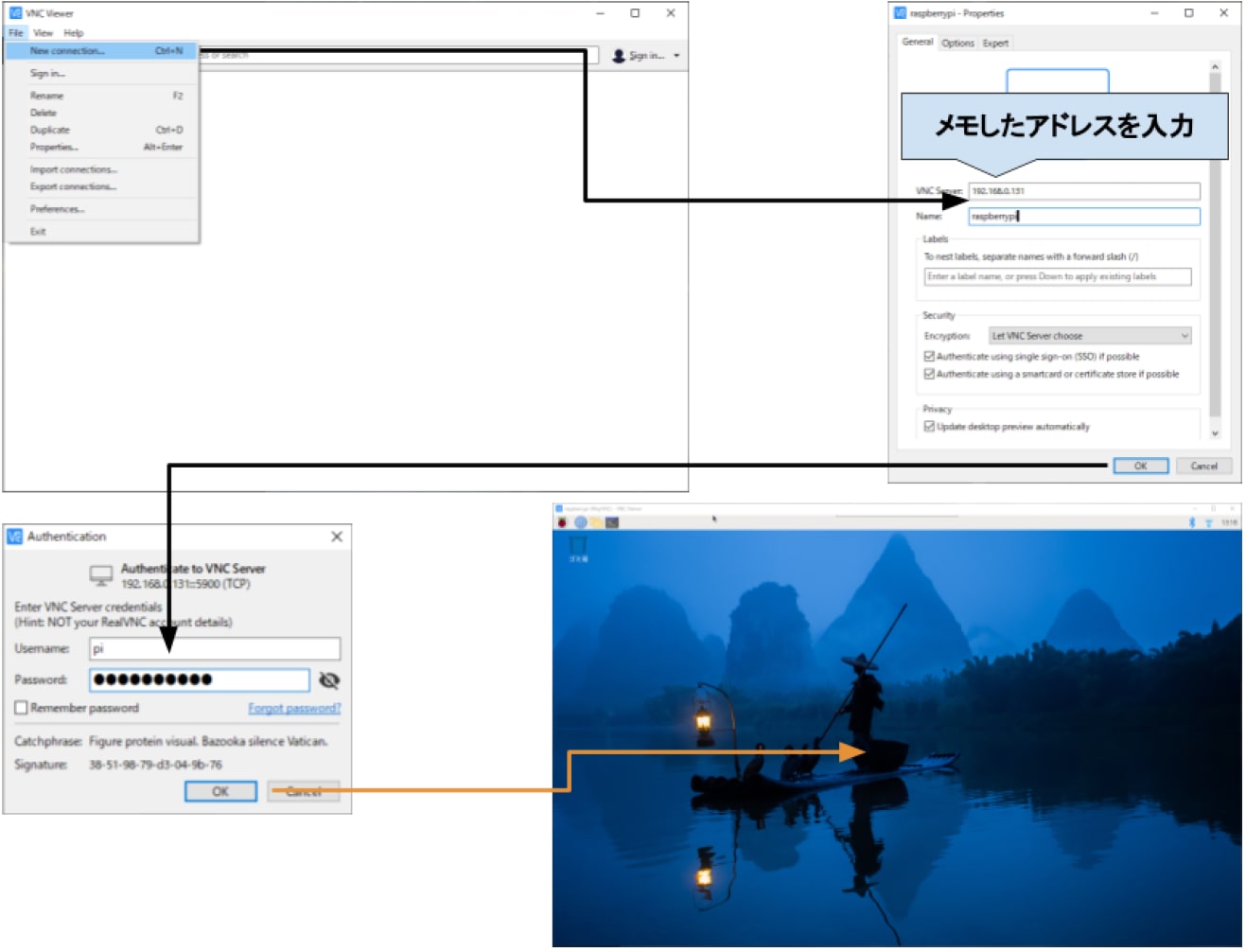
8.日本語入力
ターミナルを開く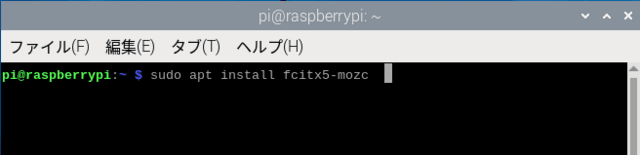
$sudo apt install fcitx5-mozc
$im-config -n fcitx5
$sudo apt install fonts-noto-cjk
$reboot
VNC Viweにて再度接続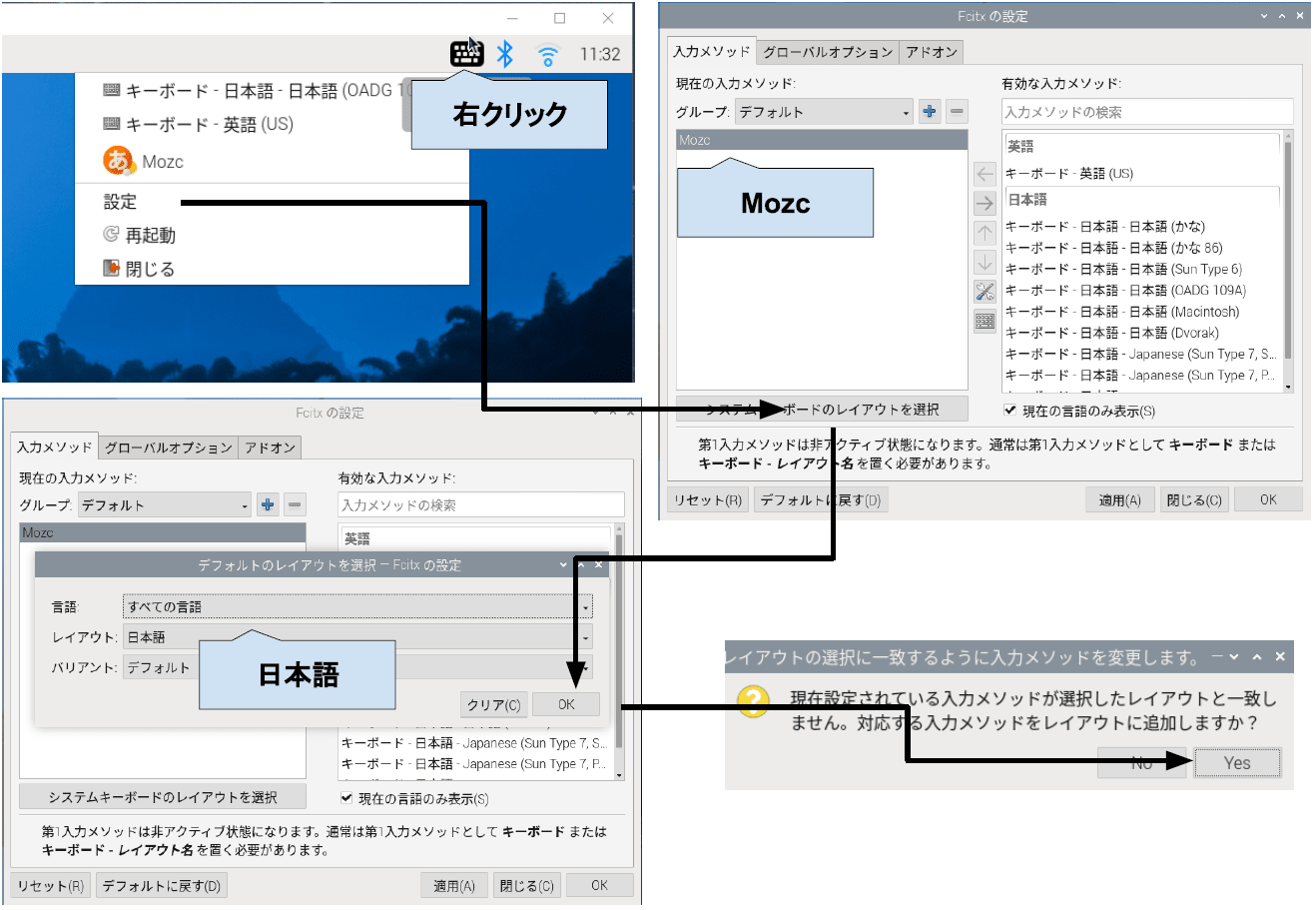
$reboot
VNC Viewを再接続
ターミナルで日本語入力できることを確認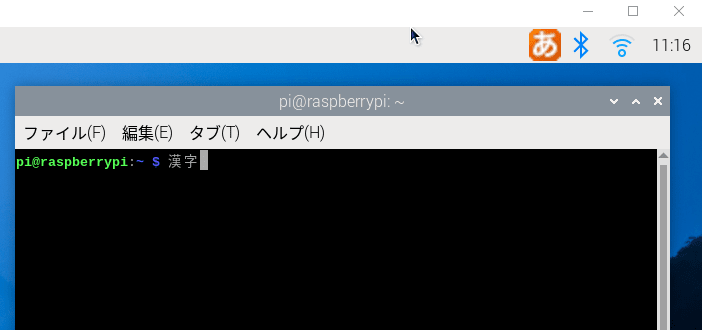
9.samba設定
ターミナルを開く
$sudo apt install samba samba-common-bin
$sudo smbpasswd -a pi
$sudo systemctl restart smbd
PCでエクスプローラを開く
メモしたアドレスに接続、Raspberryとの接続を確認
─以上─
◆Raspberry Pi Pico W と PC をWIFI接続して、センサ測定値を取得する手順。Raspberry Pi は Arudino IDE、PC は Visual C# でプログラムを開発。Raspberry Pi はサンプルスケッチの HelloServer を改変。Visual C# は HttpClient() で通信。
1.準備
●MPU:Raspberry Pi Pico W
●IDE(Raspberry Pi):Arduino IDE 2.2.1
●Language(Raspberry Pi):C++
●PC:Windows 10 Pro 64bit Version 22H2
●IDE(PC):Visual Studio Community 2022 Version 17.8.3
●Language(PC):VIsual C#
●Framewaork: .NET 8.0
2.HelloServer ソースコードの改変
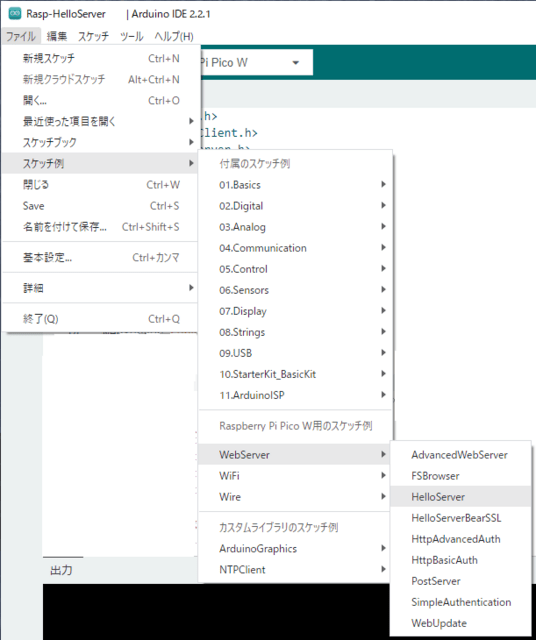
<ファイル>→<スケッチ例>→<WebServer>→<HelloServer>
・・・ #define STASSID "your-ssid" // PCと同じ2.4GHzのSSIDに変更 #define STAPSK "your-password" // SSIDのパスワードを入力 String strMeasurementData = String(12); // センサ測定値(グローバル変数) ・・・ void setup(void) { ・・・ server.on("/Measurement", []() { server.send(200, "text/plain", strMeasurementData); }); ・・・ } void loop(void) { ・・・ Measurement_act = センサ測定値取得関数(); // センサ測定値を取得 strMeasurementData = String(Measurement_act, 2); ・・・ }
センサ測定値取得関数() は使用するセンサに合わせて作成
必ずSTASSID、STAPSK は自分のWIFI環境に書き換える
3.Visual C#ソースコード
MainWindow.xaml
<Window x:Class="Simple_Raspi_HttpClient.MainWindow"
xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"
xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml"
xmlns:d="http://schemas.microsoft.com/expression/blend/2008"
xmlns:mc="http://schemas.openxmlformats.org/markup-compatibility/2006"
xmlns:local="clr-namespace:Simple_Raspi_HttpClient"
mc:Ignorable="d"
Title="MainWindow" Height="450" Width="800">
<Grid>
<TextBlock x:Name="MeasuarmentDataReceive"
HorizontalAlignment="Left"
VerticalAlignment="Top"
TextWrapping="Wrap"
ScrollViewer.VerticalScrollBarVisibility="Auto" />
</Grid>
</Window>
MainWindow.xaml.cs
using System.ComponentModel;
using System.Diagnostics;
using System.Net.Http;
using System.Windows;
using System.Windows.Threading;
namespace Simple_Raspi_HttpClient
{
///
/// Interaction logic for MainWindow.xaml
///
public partial class MainWindow : Window
{
private DispatcherTimer timer1 = new DispatcherTimer(DispatcherPriority.Normal)
{ // タイマーインターバル = 1秒
Interval = TimeSpan.FromMilliseconds(1000),
};
string iotDeviceUrl = "http://your-iot-device-api-endpoint";
public MainWindow()
{
InitializeComponent();
timer1.Tick += new EventHandler(RunTimer1);
timer1.Start();
this.Closing += new CancelEventHandler(StopTimer1);
MeasuarmentDataReceive.Text = string.Empty;
}
private async void RunTimer1(object sender, EventArgs e)
{
string MeasurementData = await ReadMeasurementData(iotDeviceUrl);
MeasuarmentDataReceive.Text += MeasurementData + "\r\n";
}
private void StopTimer1(object sender, EventArgs e)
{
timer1.Stop();
}
private async Task ReadMeasurementData(string _url)
{
using (HttpClient client = new HttpClient())
{
try
{
// HTTP GETリクエストを送信
HttpResponseMessage response = await client.GetAsync(_url);
// 応答が成功した場合は、データを取得して返す
if (response.IsSuccessStatusCode)
{
string data = await response.Content.ReadAsStringAsync();
return data;
}
else
{
// エラーメッセージを表示
Console.WriteLine("Error: " + response.StatusCode);
return null;
}
}
catch (Exception _ex)
{
Trace.WriteLine($"URL:{_url}:{_ex}");
return null;
}
}
}
}
}
http://your-iot-device-api-endpoint は Raspberry Pi のアドレスが 192.168.0.123 の場合
http://192.168.0.123/Measurement に変更
4.実行
Raspberry Pi のプログラムをスタート
PC のプログラムをスタート
1秒ごとにセンサ測定値が表示されることを確認
─以上─
◆Raspberry Pi Pico W を Bluetooth で Androidスマホに接続する手順
1.準備
●MPU:Raspberry Pi Pico W
●Phone:Google Pixel 8 pro
●PC:Windows 10 Pro 64bit Version 22H2
●Language:MicroPython(RPI_PICO_W-20231005-v1.21.0)
●IDE:Thonny 4.1.3
2.スマホアプリインストール
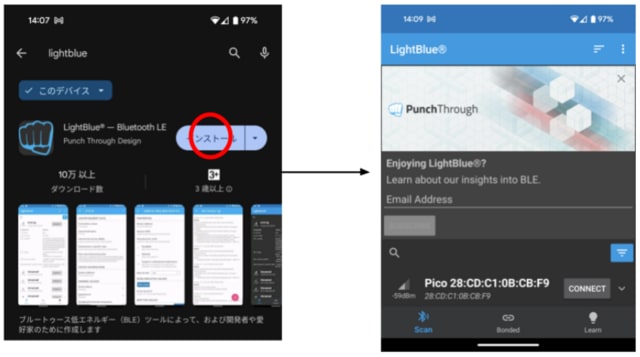
Google Play で [LightBlue] を検索して、インストールする。アプリを開く
3.Pythonサンプルコード
ここのサンプルコードを参照
(ble_advertising.py , picow_ble_temp_sensor.py)
# This example demonstrates a simple temperature sensor peripheral.
#
# The sensor's local value is updated, and it will notify
# any connected central every 10 seconds.
import bluetooth
import random
import struct
import time
import machine
import ubinascii
# from ble_advertising import advertising_payload
from micropython import const
from machine import Pin
_ADV_TYPE_FLAGS = const(0x01)
_ADV_TYPE_NAME = const(0x09)
_ADV_TYPE_UUID16_COMPLETE = const(0x3)
_ADV_TYPE_UUID32_COMPLETE = const(0x5)
_ADV_TYPE_UUID128_COMPLETE = const(0x7)
_ADV_TYPE_UUID16_MORE = const(0x2)
_ADV_TYPE_UUID32_MORE = const(0x4)
_ADV_TYPE_UUID128_MORE = const(0x6)
_ADV_TYPE_APPEARANCE = const(0x19)
_IRQ_CENTRAL_CONNECT = const(1)
_IRQ_CENTRAL_DISCONNECT = const(2)
_IRQ_GATTS_INDICATE_DONE = const(20)
_FLAG_READ = const(0x0002)
_FLAG_NOTIFY = const(0x0010)
_FLAG_INDICATE = const(0x0020)
# org.bluetooth.service.environmental_sensing
_ENV_SENSE_UUID = bluetooth.UUID(0x181A)
# org.bluetooth.characteristic.temperature
_TEMP_CHAR = (
bluetooth.UUID(0x2A6E),
_FLAG_READ | _FLAG_NOTIFY | _FLAG_INDICATE,
)
_ENV_SENSE_SERVICE = (
_ENV_SENSE_UUID,
(_TEMP_CHAR,),
)
# org.bluetooth.characteristic.gap.appearance.xml
_ADV_APPEARANCE_GENERIC_THERMOMETER = const(768)
class BLETemperature:
def __init__(self, ble, name=""):
self._sensor_temp = machine.ADC(4)
self._ble = ble
self._ble.active(True)
self._ble.irq(self._irq)
((self._handle,),) = self._ble.gatts_register_services((_ENV_SENSE_SERVICE,))
self._connections = set()
if len(name) == 0:
name = 'Pico %s' % ubinascii.hexlify(self._ble.config('mac')[1],':').decode().upper()
print('Sensor name %s' % name)
self._payload = advertising_payload(
name=name, services=[_ENV_SENSE_UUID]
)
self._advertise()
def _irq(self, event, data):
# Track connections so we can send notifications.
if event == _IRQ_CENTRAL_CONNECT:
conn_handle, _, _ = data
self._connections.add(conn_handle)
elif event == _IRQ_CENTRAL_DISCONNECT:
conn_handle, _, _ = data
self._connections.remove(conn_handle)
# Start advertising again to allow a new connection.
self._advertise()
elif event == _IRQ_GATTS_INDICATE_DONE:
conn_handle, value_handle, status = data
def update_temperature(self, notify=False, indicate=False):
# Write the local value, ready for a central to read.
temp_deg_c = self._get_temp()
print("write temp %.2f degc" % temp_deg_c);
self._ble.gatts_write(self._handle, struct.pack("〈h", int(temp_deg_c * 100)))
if notify or indicate:
for conn_handle in self._connections:
if notify:
# Notify connected centrals.
self._ble.gatts_notify(conn_handle, self._handle)
if indicate:
# Indicate connected centrals.
self._ble.gatts_indicate(conn_handle, self._handle)
def _advertise(self, interval_us=500000):
self._ble.gap_advertise(interval_us, adv_data=self._payload)
# ref https://github.com/raspberrypi/pico-micropython-examples/blob/master/adc/temperature.py
def _get_temp(self):
conversion_factor = 3.3 / (65535)
reading = self._sensor_temp.read_u16() * conversion_factor
# The temperature sensor measures the Vbe voltage of a biased bipolar diode, connected to the fifth ADC channel
# Typically, Vbe = 0.706V at 27 degrees C, with a slope of -1.721mV (0.001721) per degree.
return 27 - (reading - 0.706) / 0.001721
# Generate a payload to be passed to gap_advertise(adv_data=...).
def advertising_payload(limited_disc=False, br_edr=False, name=None, services=None, appearance=0):
payload = bytearray()
def _append(adv_type, value):
nonlocal payload
payload += struct.pack("BB", len(value) + 1, adv_type) + value
_append(
_ADV_TYPE_FLAGS,
struct.pack("B", (0x01 if limited_disc else 0x02) + (0x18 if br_edr else 0x04)),
)
if name:
_append(_ADV_TYPE_NAME, name)
if services:
for uuid in services:
b = bytes(uuid)
if len(b) == 2:
_append(_ADV_TYPE_UUID16_COMPLETE, b)
elif len(b) == 4:
_append(_ADV_TYPE_UUID32_COMPLETE, b)
elif len(b) == 16:
_append(_ADV_TYPE_UUID128_COMPLETE, b)
# See org.bluetooth.characteristic.gap.appearance.xml
if appearance:
_append(_ADV_TYPE_APPEARANCE, struct.pack("〈h", appearance))
return payload
def decode_field(payload, adv_type):
i = 0
result = []
while i + 1 〈 len(payload):
if payload[i + 1] == adv_type:
result.append(payload[i + 2 : i + payload[i] + 1])
i += 1 + payload[i]
return result
def decode_name(payload):
n = decode_field(payload, _ADV_TYPE_NAME)
return str(n[0], "utf-8") if n else ""
def decode_services(payload):
services = []
for u in decode_field(payload, _ADV_TYPE_UUID16_COMPLETE):
services.append(bluetooth.UUID(struct.unpack("〈h", u)[0]))
for u in decode_field(payload, _ADV_TYPE_UUID32_COMPLETE):
services.append(bluetooth.UUID(struct.unpack("〈d", u)[0]))
for u in decode_field(payload, _ADV_TYPE_UUID128_COMPLETE):
services.append(bluetooth.UUID(u))
return services
def demo():
ble = bluetooth.BLE()
temp = BLETemperature(ble)
counter = 0
led = Pin('LED', Pin.OUT)
while True:
if counter % 10 == 0:
temp.update_temperature(notify=True, indicate=False)
led.toggle()
time.sleep_ms(1000)
counter += 1
if __name__ == "__main__":
demo()
4.測定した温度をスマフォに表示
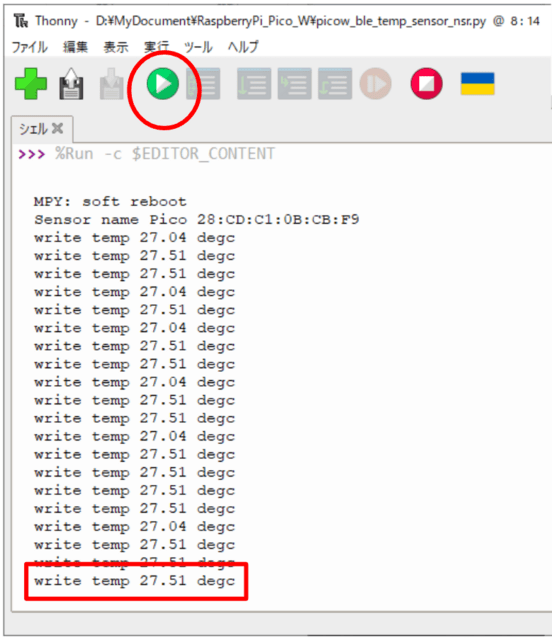
Thonny でプログラムを実行
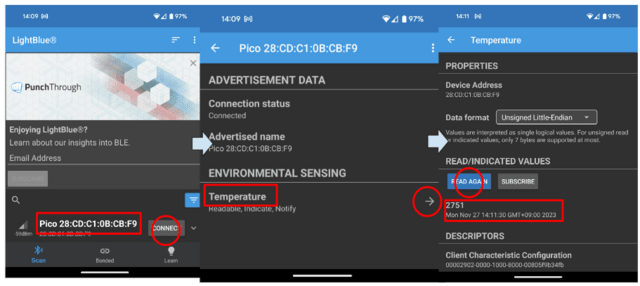
Raspberry Pi Pico W を探して、接続
Temperature を選択
Thonny のシェルと比較して100倍の数値であることを確認
─以上─