ふと気づいたことが、できるかどうか確認するために試作を始めました。
自律的にシステムが動作することで、厳しい状況を緩和できることは多々あります。少しの自律性で、状況に順応する角の取れた仕組みが実現できそうです。
自律システムには、状況を把握するためのセンサーが必要です。スマホの普及とIoT化の波でセンサーの半導体化が進み、様々なセンサーが入手しやすくなりました。
自律システムには、状況を把握するためのセンサーが必要です。スマホの普及とIoT化の波でセンサーの半導体化が進み、様々なセンサーが入手しやすくなりました。
試作の第一段階は、いくつかのセンサーの情報を読み取ることです。今回は、まだ経験のない、加速度センサーからのデータを読んでいます。
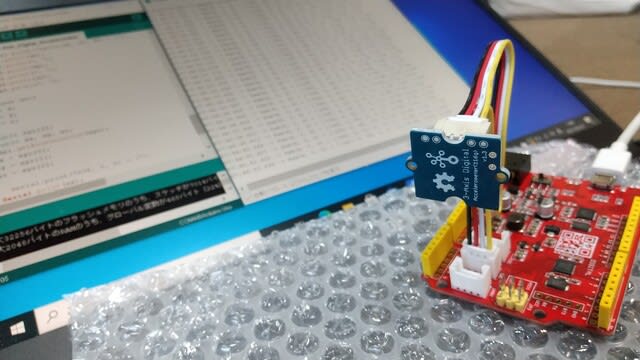
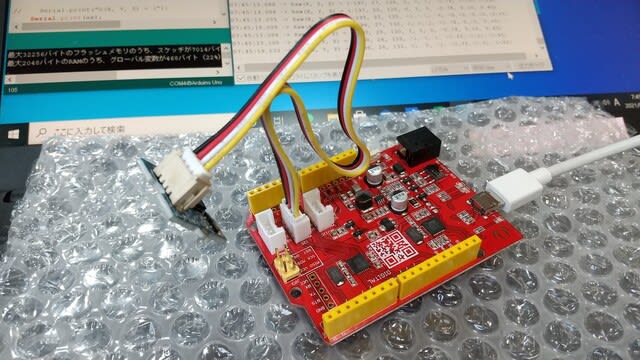
■センサーを付けたArduinoマイコン基盤
Arduinoはオープンなハードウエアで、基板上には小さなマイコンといろいろなデバイスと接続するための端子が付いています。
オリジナルな基盤設計を、目的に応じて改変した基盤の一つが以下のもので、直接Groveを接続できるのでとても便利。センサーはI2Cでつながっています。
Arduinoはオープンなハードウエアで、基板上には小さなマイコンといろいろなデバイスと接続するための端子が付いています。
オリジナルな基盤設計を、目的に応じて改変した基盤の一つが以下のもので、直接Groveを接続できるのでとても便利。センサーはI2Cでつながっています。
■センサー周りは既製品を使いイメージ固め
今回は加速度センサーの値を読み取ってみました。センサーはArduinoを経由してWindowsと接続。Windows上にArduinoマイコンソフトの開発環境があります。マイコン上の読み取りプログラムは、Arduinoライブラリとして公開してある例を基に、改変して使っています。まずはこれでイメージが固まりました。