宇宙機用液体ロケット初段帰還着陸船の船体外殻設計進捗状態です。
オープンデッキ貨物船に近い船体形状として構想設計を進めていますが、定位置制御を行う全方位スクリュー推進機4基を配置しています。

宇宙機用液体ロケット初段帰還着陸船の船体外殻設計進捗状態です。
オープンデッキ貨物船に近い船体形状として構想設計を進めていますが、定位置制御を行う全方位スクリュー推進機4基を配置しています。
ラズベリーパイ5ROS2制御となるLidarとデプスカメラ付き4輪ナムカムホイール移動ロボットキットを準備したので組み立てて動かしてみます。

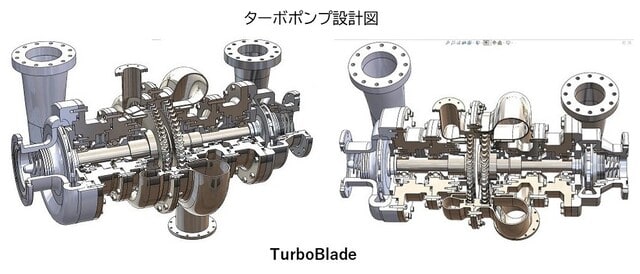
小型半径流反復流れ蒸気タービン発電機の3次元設計図です。
タービンノズル部には蒸気量を調整して回転数を一定に保つメカニカルガバナーが付いています。

今後自分が開発してみたい作業ロボットとしては、
・船舶製造現場溶接用人型4足作業ロボット
・建設現場重作業用人型4足作業ロボット
・土木現場重作業点検作業用人型4足作業ロボット
・農業現場用水牛型4足作業ロボット
・発電所点検及びメンテナンス作業用人型ロボット
などが有ります。
大型バイクが走行時に受ける走行風を流体解析シミュレーションした結果図です。
走行風の流れを流線群と中心断面流跡線群などで見ています。