








発端
メガドライブのエイリアンソルジャーの動画をみて、ボスの関節技を実装してみたくなって開始。
最初プチコン4で作り始めたのですが、
SPLINKがスプライトの表示順を変更してしまうので一旦保留
Pygameで作り直しトータルで2日ぐらいかかってます。
静止画
こんな感じのものに数字をふったものを方眼用紙にまず書く。

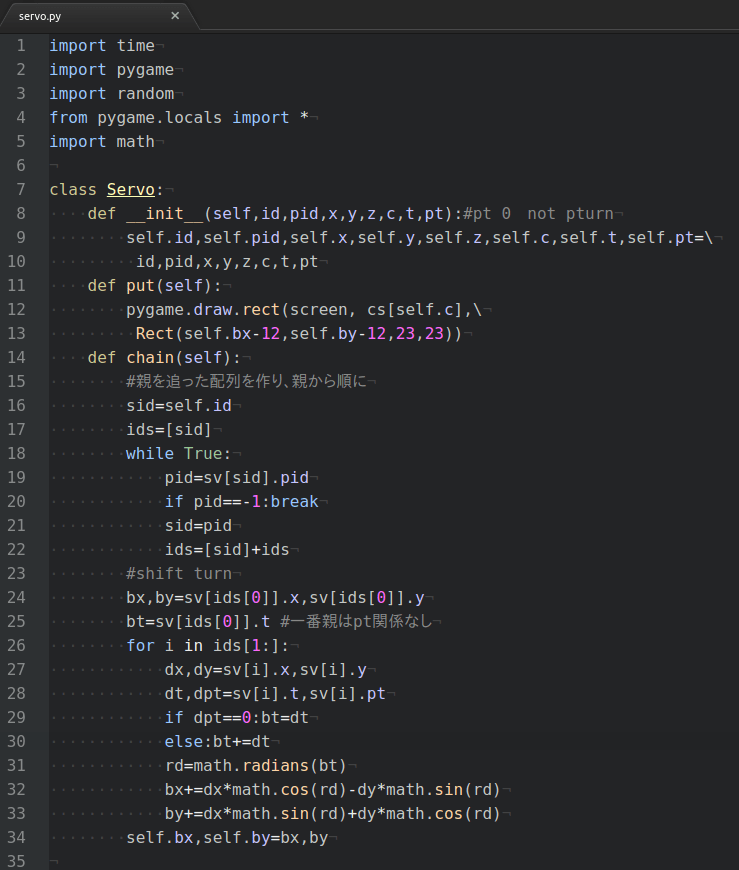
完成品
動かしてみたもの。

クラス設計
各サーボにはIDと親サーボID、初期(相対)座標と、色、回転と回転の追随情報があります。
chainは親サーボを探して、親サーボからの位置を計算して表示位置bx,byに格納します。
メインルーチン
サーボをZ座標でソートして奥から書いていきます。
表示後、ランダムでサーボを少し動かしておきます。
Pygameの終了処理。
マウスアップは元のプログラムからの消し忘れです。

データ設計
色のデータ(PC-8001風)
サーボの初期データ
スクリーンの準備
Pygame初期化
メインルーチン呼び出し
Pygame終了

当初の予定
さらに回し蹴りみたいなのを3D座標で表現してみたくなって開始
プチブロックでサンプル作成

3次元での関節制御が難しそうなのでまずは2Dから。
3Dデータ作成はかなり大変そうで、
モーションキャプチャー技術が発明されたのが腑に落ちました。









