








さて、表題のとおり
足裏維持するための比率で各パーツを再現し、同じ軸構成で3kgをわずかに超えることを想定します。
重量に余裕を持たせているのは、オート化するためのマイコン追加のためです。
スペック
↑より
<完成時サイズ>
401.05(H)×194.4(w)×129(D) mm
<重量>
約1500g
<足裏と脚の長さ>
足裏122×78mm 脚長194.5mm
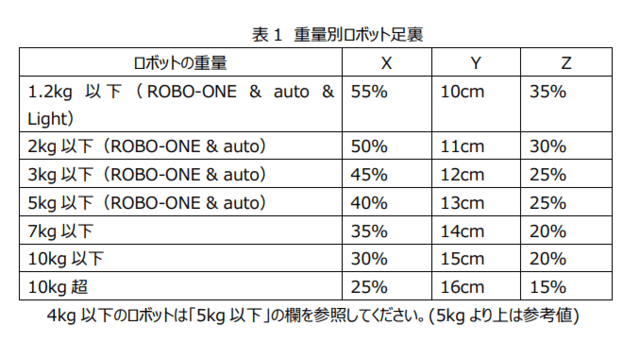
<公認解除に伴う 足裏に対する適正の脚長>
1kg:不可
2kg:不可
3kg:不可
4kg:可 脚長:312.5mm以上なら 足裏 125×78.125㎜の近似値上側(測定誤差考慮)
したがって、 脚長の比率は、小数1位程度まで近似値かつ足裏規定を満たすのは、1.61倍の脚長で規定値に近似の313㎜を目安にし、
各パーツを1.61倍の近似値小数1位で作成し直します。
外観は、ほぼKHRの1.6倍の機体(足裏は機体的には小さいけど)になるはずです。
以下<参考資料MISUMI presents 第41回ROBO-ONE競技規則改定(その2)のお知らせ - ROBO-ONE ->より抜粋↓
次回、各部位の寸法







※コメント投稿者のブログIDはブログ作成者のみに通知されます