28号は右脚に股関節のフレームと
5つ目のサーボモーターを取り付け
右脚を完成させる作業。
(⌒‐⌒)(^ω^)
右股関節内側フレームを取り付け
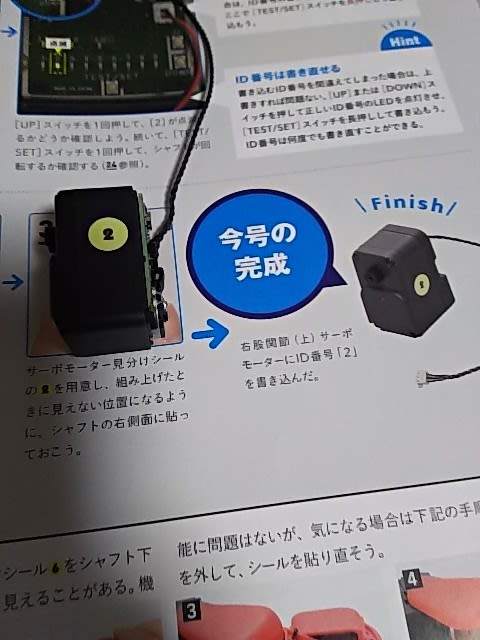
そこに、右股関節(上)サーボモーターを
取り付ける。
次に足首サイドパネルを取り付け、
リード線を隠す。
最後にサーボモーターのID番号の
2番から6番の確認と動作確認。
一度サーボモーターを3つ外して
組み立て直したので完璧だ。
(⌒‐⌒)(^ω^)
これで右脚の組み立て作業は
全て終了。
お疲れ様でした。
😑👀



28号は右脚に股関節のフレームと
5つ目のサーボモーターを取り付け
右脚を完成させる作業。
(⌒‐⌒)(^ω^)
右股関節内側フレームを取り付け
そこに、右股関節(上)サーボモーターを
取り付ける。
次に足首サイドパネルを取り付け、
リード線を隠す。
最後にサーボモーターのID番号の
2番から6番の確認と動作確認。
一度サーボモーターを3つ外して
組み立て直したので完璧だ。
(⌒‐⌒)(^ω^)
これで右脚の組み立て作業は
全て終了。
お疲れ様でした。
😑👀
ロビ2の27号は前号までのサーボモーターの
ID番号の確認と動作確認だ。
(⌒‐⌒)(^ω^)
ID番号3,4,5,6と右股関節(下)、右ひざ
右足首、右足首が正常に動作するか
どうかの確認。
(´・д・`)💨
これは再度組み立て直したので
問題なく動作した。
(⌒‐⌒)(^ω^)