■1985年世界で最初にマイコン制御ロボットキットを発売!
1985年世界で最初にフィッシャーテクニックがマイコン制御ロボットキットを発売して本年で30年を迎えます。(レゴマインドストームの発売は1998年)最初に発売された商品はロボット2種とプロッターでした。レベル的にも内容的にもほぼ30年が経過した現在でも十分に通用するものです。マニュアルはこちらからダウンロード可能です。




パッケージのパソコンが時代を象徴しています。当時の対応パソコンはコモドール・IBM-PC・アップルⅡ・Amegaなどで言語はPascalとBasicでした。内容は今日から見てもそれなりのものです。2年後の1987年に学習キット「Computing Experimental」が発売されました。


1988年にこのComputing Experimentalの紹介記事がAppleⅡの雑誌だったと思うのですが掲載されているのを読んで興味を覚え購入できないかと調べましたが日本に代理店は無く国内では入手不可でしたので直接フィッシャーテクニックに手紙を書いて購入を希望すると代理店の教材会社を紹介してくれたのでそこから各ロボットキットを数台購入しました。(当時の購入価格は1台150マルクで日本円で15000円弱でした)ただパソコンは当時NEC-PCが全盛の時代でしたのでIBM-PCパソコンが手に入らず、せっかく買ってもすぐには使える状態ではありませんでした。そこでフィッシャーのロボットのために50万円ほどした三洋のAXパソコンを購入してやっと動かすことができました。マニュアルが英語版でしたのでこれを和訳しBASICの勉強もかねてじっくり取り組みました。1年間ほどフィッシャーのロボットキットに夢中になり仕入先や取引先の方が会社にこられるとその度ごとに自慢して見せたものです。


組み立てたモデルは現在でも健在ですが肝心のAXパソコンを処分してしまったので動かすことができません。使わなくなったWindowsパソコンにフロッピーディスクドライブを取り付けて動かしてみようと思いながらそのままになっています。



その後1991年に学校向け教材として「Profi Computing」が発売されました。(残念ながらこの機種は購入していません。)この段階までは言語はBasicとPascalでしたが学校での限られた授業時間内に習得させることが難しいということでもっと簡単に学習できるプログラム言語が必要との要望に答えるためにフローチャート式にプログラムが組み立てられるプログラム言語Lucky Logicが開発されていきます。


■学校向けにプログラム言語Lucky LogicおよびLucky Logic for Windowsを開発
1991年にフローチャート式にブロックを並べるだけでプログラムが作れる最初のDOS版Lucky Logicが発売されPascalやBasicに代わる学校向け言語として提供されました。1994年にWindows対応の試作版LLWIN2.04が開発され「PROFI COMPUTING」にも搭載されました。そして1998年に正式にLLWIN2.1として発売されその後改良されて2000年にはLLWIN3.0として完成しました。




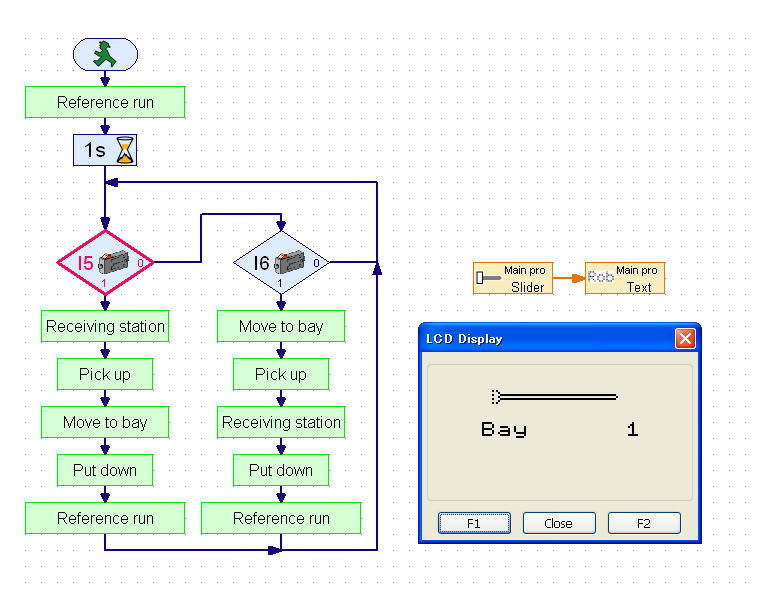
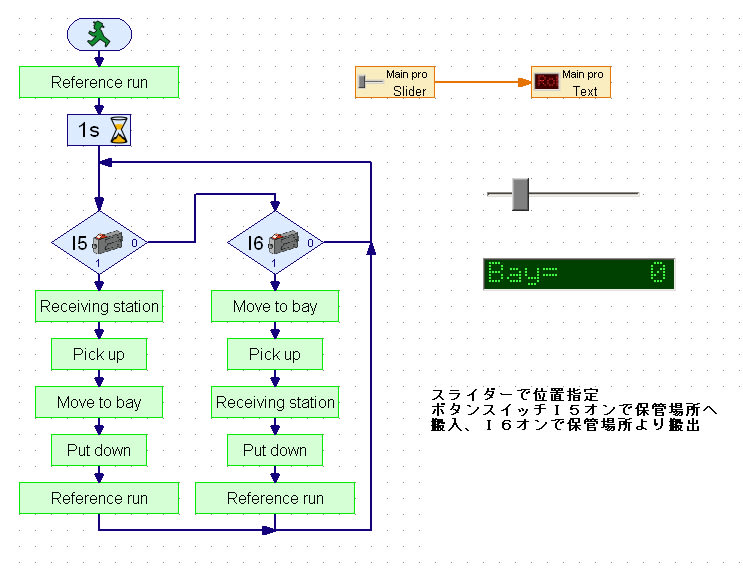
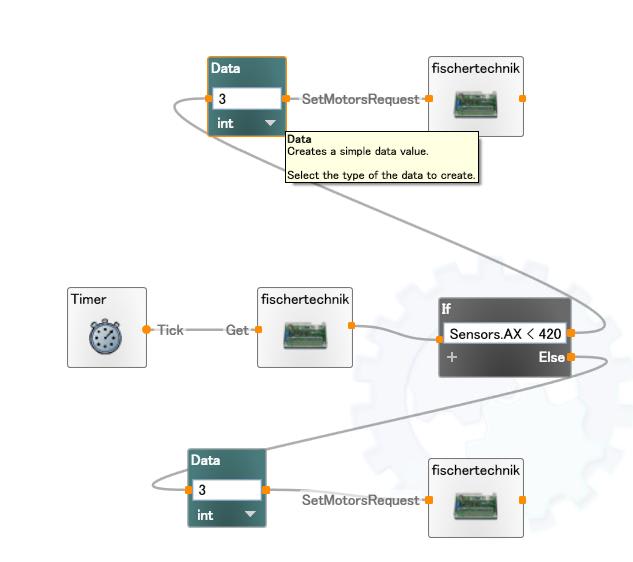
最初に開発されたLucky LogicとLLWin3.0でのプログラミング例。LLWin3.0になると誰でも簡単にプログラムできるようになりました。


■1998年シリアルインターフェイスとコンピューティングシリーズの発売
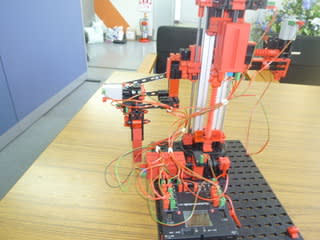
そして1998年以降ソフトウエアLLWINの充実とあいまって「ロボット入門」、「自走ロボット」、「産業ロボット」、「空気圧ロボット」、「バイオニックロボット」、「自走ロボットⅡ」が順次Computing ラインとして発売されていきました。







■2005年Roboインターフェイスと新ソフトウエアRoboproの発売
2005年に従来の8ビットマイコンに代わって三菱の16ビットマイコンMC16を搭載したRoboインターフェイスが開発されそれに対応する構造言語型のソフトウエアROBOPROも発売されました。


そしてこの新ソフトウエアに対応したロボットキットとして新しく「Robo自走ロボット」から「Robo空気圧真空ロボット」までが順次発売されました。




■2009年高性能小型インターフェイス「Robo TX Controller」の発売
2009年に32ビットマイコン使用の新インターフェイスが発売されました。32-bit ARM 9 processor(200MHz)を搭載し内蔵メモリーは 8MB RAM および2MB Flash付で通信はBluetooth 対応で128×64 pixel 液晶画面付でサイズも小さく90×90×15mmで重さも90g、拡張端子としてI2C,RS485付です。正に最先端の高性能プロセッサーで任天堂DSなどに使用されているのと同じものでした。将来の画像処理を念頭においているものと思われるカメラジャックもついていますがまだ対応カメラは発売されていません。インターフェイスの小型化でロボカップジュニアの大会に出場できるサイズのロボットが組み立てられるようになり世界的に一挙に販売台数が増えたようです。


そしてこのTXコントローラーに対応したロボットキットとして2009年に「Robo TX Training Lab」が発売され、2010年には「Explorer」も発売されました。いずれのキットもベースはRobo入門キット・自走ロボットキットおよびRobo探査ロボットと同じでこれらをTX用にアップグレードしたものです。2011年には「RoboTX産業用ロボット」が2012年には「RoboTX空気圧ロボット」が発売されました。




■2014年より高性能な「Robotics TXT Controller」の発売
そして2014年11月にはTXコントローラーをより一段と高性能でUSBカメラも搭載可能にしたTXTコントローラーとこのコントローラーを搭載したロボットキット「Robotics TXTディスカバリーキット」が発売されます。


以上が1985年から今日に至るまでのフィッシャーテクニックのロボットキットの歴史ですがマイコンの高性能化に合わせてほぼ5年毎に新しいインターフェイスが発売されてきています。フィッシャーテクニックはロボット玩具メーカーではありません。あくまでも技術教育教材としてのブロックをベースにおいて子供たちがブロックを通じてものづくりに興味を抱き、その独創力・創造力を向上させ、また作り上げたものを手動・電動・ラジコン・コンピューター制御で実際に動かすことでその背後にある駆動・制御技術や理論を学習していくきっかけになればと望んでいるのです。
そのポリシーはあくもでも Learn about technology while playing 遊びながら技術を学ぼう!です。
2014.10 以前に記載したブログの内容を少し修正して書き直しました。

1985年世界で最初にフィッシャーテクニックがマイコン制御ロボットキットを発売して本年で30年を迎えます。(レゴマインドストームの発売は1998年)最初に発売された商品はロボット2種とプロッターでした。レベル的にも内容的にもほぼ30年が経過した現在でも十分に通用するものです。マニュアルはこちらからダウンロード可能です。
パッケージのパソコンが時代を象徴しています。当時の対応パソコンはコモドール・IBM-PC・アップルⅡ・Amegaなどで言語はPascalとBasicでした。内容は今日から見てもそれなりのものです。2年後の1987年に学習キット「Computing Experimental」が発売されました。
1988年にこのComputing Experimentalの紹介記事がAppleⅡの雑誌だったと思うのですが掲載されているのを読んで興味を覚え購入できないかと調べましたが日本に代理店は無く国内では入手不可でしたので直接フィッシャーテクニックに手紙を書いて購入を希望すると代理店の教材会社を紹介してくれたのでそこから各ロボットキットを数台購入しました。(当時の購入価格は1台150マルクで日本円で15000円弱でした)ただパソコンは当時NEC-PCが全盛の時代でしたのでIBM-PCパソコンが手に入らず、せっかく買ってもすぐには使える状態ではありませんでした。そこでフィッシャーのロボットのために50万円ほどした三洋のAXパソコンを購入してやっと動かすことができました。マニュアルが英語版でしたのでこれを和訳しBASICの勉強もかねてじっくり取り組みました。1年間ほどフィッシャーのロボットキットに夢中になり仕入先や取引先の方が会社にこられるとその度ごとに自慢して見せたものです。
組み立てたモデルは現在でも健在ですが肝心のAXパソコンを処分してしまったので動かすことができません。使わなくなったWindowsパソコンにフロッピーディスクドライブを取り付けて動かしてみようと思いながらそのままになっています。
その後1991年に学校向け教材として「Profi Computing」が発売されました。(残念ながらこの機種は購入していません。)この段階までは言語はBasicとPascalでしたが学校での限られた授業時間内に習得させることが難しいということでもっと簡単に学習できるプログラム言語が必要との要望に答えるためにフローチャート式にプログラムが組み立てられるプログラム言語Lucky Logicが開発されていきます。
■学校向けにプログラム言語Lucky LogicおよびLucky Logic for Windowsを開発
1991年にフローチャート式にブロックを並べるだけでプログラムが作れる最初のDOS版Lucky Logicが発売されPascalやBasicに代わる学校向け言語として提供されました。1994年にWindows対応の試作版LLWIN2.04が開発され「PROFI COMPUTING」にも搭載されました。そして1998年に正式にLLWIN2.1として発売されその後改良されて2000年にはLLWIN3.0として完成しました。
最初に開発されたLucky LogicとLLWin3.0でのプログラミング例。LLWin3.0になると誰でも簡単にプログラムできるようになりました。
■1998年シリアルインターフェイスとコンピューティングシリーズの発売
そして1998年以降ソフトウエアLLWINの充実とあいまって「ロボット入門」、「自走ロボット」、「産業ロボット」、「空気圧ロボット」、「バイオニックロボット」、「自走ロボットⅡ」が順次Computing ラインとして発売されていきました。
■2005年Roboインターフェイスと新ソフトウエアRoboproの発売
2005年に従来の8ビットマイコンに代わって三菱の16ビットマイコンMC16を搭載したRoboインターフェイスが開発されそれに対応する構造言語型のソフトウエアROBOPROも発売されました。
そしてこの新ソフトウエアに対応したロボットキットとして新しく「Robo自走ロボット」から「Robo空気圧真空ロボット」までが順次発売されました。
■2009年高性能小型インターフェイス「Robo TX Controller」の発売
2009年に32ビットマイコン使用の新インターフェイスが発売されました。32-bit ARM 9 processor(200MHz)を搭載し内蔵メモリーは 8MB RAM および2MB Flash付で通信はBluetooth 対応で128×64 pixel 液晶画面付でサイズも小さく90×90×15mmで重さも90g、拡張端子としてI2C,RS485付です。正に最先端の高性能プロセッサーで任天堂DSなどに使用されているのと同じものでした。将来の画像処理を念頭においているものと思われるカメラジャックもついていますがまだ対応カメラは発売されていません。インターフェイスの小型化でロボカップジュニアの大会に出場できるサイズのロボットが組み立てられるようになり世界的に一挙に販売台数が増えたようです。
そしてこのTXコントローラーに対応したロボットキットとして2009年に「Robo TX Training Lab」が発売され、2010年には「Explorer」も発売されました。いずれのキットもベースはRobo入門キット・自走ロボットキットおよびRobo探査ロボットと同じでこれらをTX用にアップグレードしたものです。2011年には「RoboTX産業用ロボット」が2012年には「RoboTX空気圧ロボット」が発売されました。
■2014年より高性能な「Robotics TXT Controller」の発売
そして2014年11月にはTXコントローラーをより一段と高性能でUSBカメラも搭載可能にしたTXTコントローラーとこのコントローラーを搭載したロボットキット「Robotics TXTディスカバリーキット」が発売されます。
以上が1985年から今日に至るまでのフィッシャーテクニックのロボットキットの歴史ですがマイコンの高性能化に合わせてほぼ5年毎に新しいインターフェイスが発売されてきています。フィッシャーテクニックはロボット玩具メーカーではありません。あくまでも技術教育教材としてのブロックをベースにおいて子供たちがブロックを通じてものづくりに興味を抱き、その独創力・創造力を向上させ、また作り上げたものを手動・電動・ラジコン・コンピューター制御で実際に動かすことでその背後にある駆動・制御技術や理論を学習していくきっかけになればと望んでいるのです。
そのポリシーはあくもでも Learn about technology while playing 遊びながら技術を学ぼう!です。
2014.10 以前に記載したブログの内容を少し修正して書き直しました。