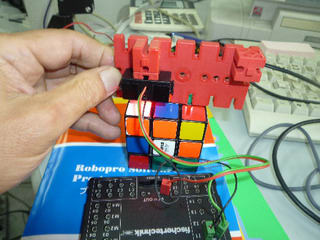
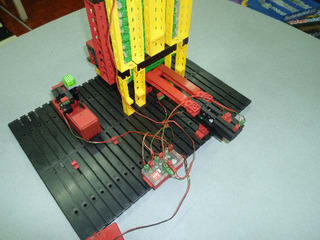
フィッシャーのファンの方からYouTubeで紹介しているファンクラブモデル「テイッシュ自販機」を作成したいのでパーツが欲しいとの依頼がありました。そこで簡単にこの装置をご紹介いたします。10円硬貨を投入口に入れるとテイッシュが1個出てくるようになっています。写真は正面と裏面です。動きはこちらからご覧になれます。

このキットには学習キット「E-tec」に使用されているモジュールを使って簡単にモーターの正転・逆転を制御しています。
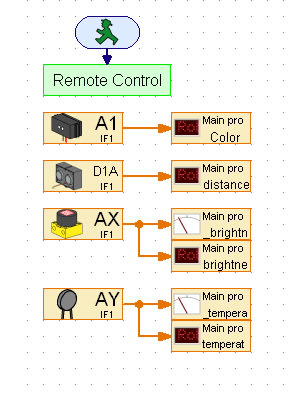
モジュールにはモーター出力が1個、デジタル入力が3個あって入力1で正転、入力2で逆転、そして入力3でモーターが停止するようになっています。10円硬貨が投入されると光の遮断およびリミットスイッチで入力が確認されてモーターが回転しリミットスイッチ2の入力でモーターが逆回転して元の位置に戻りリミットスイッチ3が入って停止するという内容です。

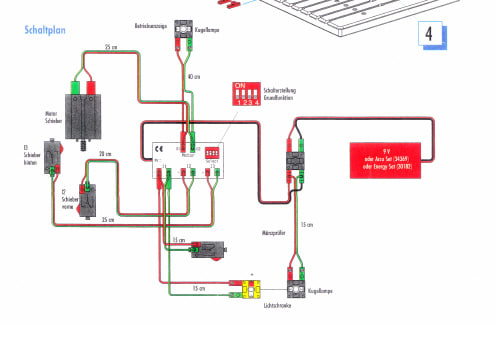
なお学習キットE-TECではこのモジュールとセンサー・モーターを組み合わせてハンドドライヤー・パンチングマシン・ガレージドア・交互点滅ライトなどを組み立ててセンサーの働きとモーターの動きが学習できるようになっています。

このキットには学習キット「E-tec」に使用されているモジュールを使って簡単にモーターの正転・逆転を制御しています。
モジュールにはモーター出力が1個、デジタル入力が3個あって入力1で正転、入力2で逆転、そして入力3でモーターが停止するようになっています。10円硬貨が投入されると光の遮断およびリミットスイッチで入力が確認されてモーターが回転しリミットスイッチ2の入力でモーターが逆回転して元の位置に戻りリミットスイッチ3が入って停止するという内容です。
なお学習キットE-TECではこのモジュールとセンサー・モーターを組み合わせてハンドドライヤー・パンチングマシン・ガレージドア・交互点滅ライトなどを組み立ててセンサーの働きとモーターの動きが学習できるようになっています。