RoboインターフェイスとRoboTXコントローラー使用の探査ロボット
フィッシャーテクニックでは従来のRoboインターフェイスに変えてRoboTXコントローラーを主要なインターフェイスに切り替えていますのでまだ3年も経たないのにRoboインターフェイス対応のロボットキットからRoboTX対応のロボットキットへと品揃えを変えてきています。本年の新製品で空気圧真空ロボットも新しくRoboTX対応版になりますのでRoboTXシリーズが完成します。
主たる違いは勿論インターフェイスに使用しているCPUの性能が格段によくなったこととモーター制御が従来のパルス歯車を使っての制御からエンコーダーモーターによる制御に変ってきた点および無線通信が従来のRF DataLinkではなく通常のBluetoothが使えるようになったことです。勿論ロボットについてはRoboCupジュニア大会に出場できるサイズで制作できるように配慮した点もあります。こられが大きな違いですがただRoboTXの液晶画面が小さすぎて目がわるい年配者にとっては文字を読むのが厄介な所です。
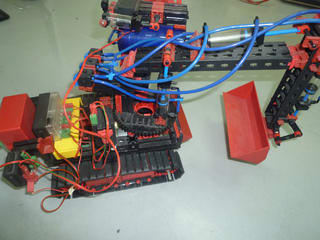
Robo探査ロボットとRoboTX探査ロボットです。


裏面はセンサーは同じですがモーターがパワーモーターとエンコーダーモーターの違いがあります。
それから超音波センサーがRoboインターフェイス用とRoboTXコントローラー用では配線が2本から3本に変っていますので同じセンサーではありません。


パネル画面からロボットを操作するプログラムの画面は次のようになっていますがRoboTXの場合は温度が摂氏温度で表示できるようになっています。これは使える関数が多くなったことによります。(指数関数・対数関数が使えるようになったため)

 摂氏温度14.6が表示されている
摂氏温度14.6が表示されている

エンコーダーモーターの使用により完全に回転数は制御できますが実際はタイヤと床面とのすべり摩擦の違いもあり
完全に走行距離や回転角度を制御できるとは限りません。
フィッシャーテクニックでは従来のRoboインターフェイスに変えてRoboTXコントローラーを主要なインターフェイスに切り替えていますのでまだ3年も経たないのにRoboインターフェイス対応のロボットキットからRoboTX対応のロボットキットへと品揃えを変えてきています。本年の新製品で空気圧真空ロボットも新しくRoboTX対応版になりますのでRoboTXシリーズが完成します。
主たる違いは勿論インターフェイスに使用しているCPUの性能が格段によくなったこととモーター制御が従来のパルス歯車を使っての制御からエンコーダーモーターによる制御に変ってきた点および無線通信が従来のRF DataLinkではなく通常のBluetoothが使えるようになったことです。勿論ロボットについてはRoboCupジュニア大会に出場できるサイズで制作できるように配慮した点もあります。こられが大きな違いですがただRoboTXの液晶画面が小さすぎて目がわるい年配者にとっては文字を読むのが厄介な所です。
Robo探査ロボットとRoboTX探査ロボットです。
裏面はセンサーは同じですがモーターがパワーモーターとエンコーダーモーターの違いがあります。
それから超音波センサーがRoboインターフェイス用とRoboTXコントローラー用では配線が2本から3本に変っていますので同じセンサーではありません。
パネル画面からロボットを操作するプログラムの画面は次のようになっていますがRoboTXの場合は温度が摂氏温度で表示できるようになっています。これは使える関数が多くなったことによります。(指数関数・対数関数が使えるようになったため)
摂氏温度14.6が表示されているエンコーダーモーターの使用により完全に回転数は制御できますが実際はタイヤと床面とのすべり摩擦の違いもあり
完全に走行距離や回転角度を制御できるとは限りません。