








<はじめに>
フィッシャーテクニックで作成したモデルをPICマイコンで動かしてみます。使用するボードはイギリスで発売されているPICボードです。モーター駆動が9Vですのでフィッシャーのモデルを動かすのに最適です。
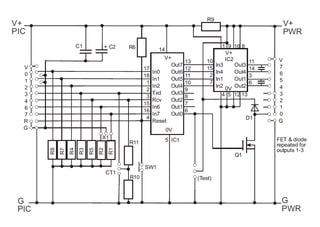
使用したボードと回路図 PICはPIC18F84Aを使用。
●これはフィッシャーテクニックとセットで販売されていたイギリスEconomatics社のPICボードで上のボードとは異なります。もともとは教材として基盤作りから自作できるようになっていましたので非常にすばらしい教材でしたが残念ながら現在は発売されていません。また差込ソケットがソフトになっていてピンをいためずにはめたり外したりできます。エレベーターモデルです。

●これはフィッシャーの産業ロボットⅡにある溶接ロボットをPICで動かすモデルです。
2個のモーターと電球およびデジタル入力5個(リミット2個・パルスカウンター2個・スタートスイッチ1個)で構成されています。動画は「こちら」からご覧になれます。

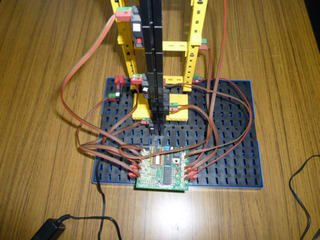
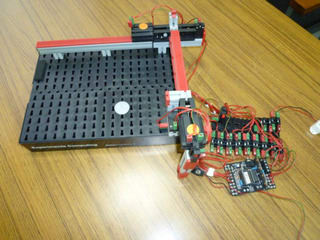
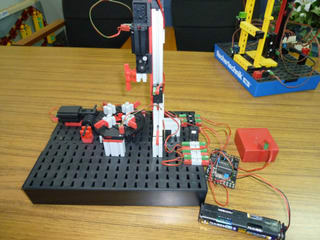
●これはXYプロッターのようなモデルで金属板を磁石で吸上げそれを所定の位置にもって行き再び持ち帰るという内容のプログラムになっています。動画は「こちら」からご覧いただけます。
●これはプレス機です。回転と上下動の2モーター出力とデジタル入力4個(リミット3個・スタートスイッチ1個)で構成されています。いずれもマイコンは6Vでモーターは9V駆動です。
<工業高校でのご活用>
実際数校の工業高校でPIC用基盤の製作からPic Assemblerによるプログラミングまでを学習する際の動作対称としてフィッシャーのロボット入門や産業ロボットなどを購入していただきご利用いただいている例がおります。

フィッシャーテクニックで作成したモデルをPICマイコンで動かしてみます。使用するボードはイギリスで発売されているPICボードです。モーター駆動が9Vですのでフィッシャーのモデルを動かすのに最適です。
使用したボードと回路図 PICはPIC18F84Aを使用。
●これはフィッシャーテクニックとセットで販売されていたイギリスEconomatics社のPICボードで上のボードとは異なります。もともとは教材として基盤作りから自作できるようになっていましたので非常にすばらしい教材でしたが残念ながら現在は発売されていません。また差込ソケットがソフトになっていてピンをいためずにはめたり外したりできます。エレベーターモデルです。
●これはフィッシャーの産業ロボットⅡにある溶接ロボットをPICで動かすモデルです。
2個のモーターと電球およびデジタル入力5個(リミット2個・パルスカウンター2個・スタートスイッチ1個)で構成されています。動画は「こちら」からご覧になれます。
●これはXYプロッターのようなモデルで金属板を磁石で吸上げそれを所定の位置にもって行き再び持ち帰るという内容のプログラムになっています。動画は「こちら」からご覧いただけます。
●これはプレス機です。回転と上下動の2モーター出力とデジタル入力4個(リミット3個・スタートスイッチ1個)で構成されています。いずれもマイコンは6Vでモーターは9V駆動です。
<工業高校でのご活用>
実際数校の工業高校でPIC用基盤の製作からPic Assemblerによるプログラミングまでを学習する際の動作対称としてフィッシャーのロボット入門や産業ロボットなどを購入していただきご利用いただいている例がおります。







