








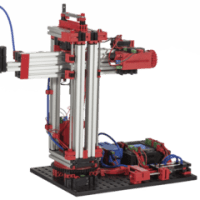
■Robo TX 産業用ロボットキット
本年度の新製品としてTXコントローラー対応の「Robo TX 産業用ロボットキット」が発売されました。
このキットで製作可能なモデルは4種類で
●グリッパーロボット
●ラック収納ロボット
●グリッパーが回転するロボット
●3軸ロボット
RoboTX automation robot
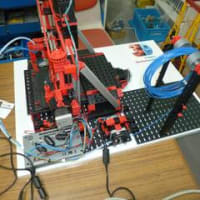
この中から自動倉庫型の「ラック収納ロボット」を組み立てて見ました。
■ラック収納ロボットの動作
これは自動倉庫ロボット或いは前回製作した「駐車場ロボット」の簡易版のようなロボットです。
ロボットの動作としては所定の位置にあるワークをフォークでピックアップしてプログラムで定められた1番から6番の収納位置にこれを搬入したり或いは逆に所定保管位置にあるワークをピックアップして搬出してきます。
■プログラムのダウンロードとディスプレイ表示
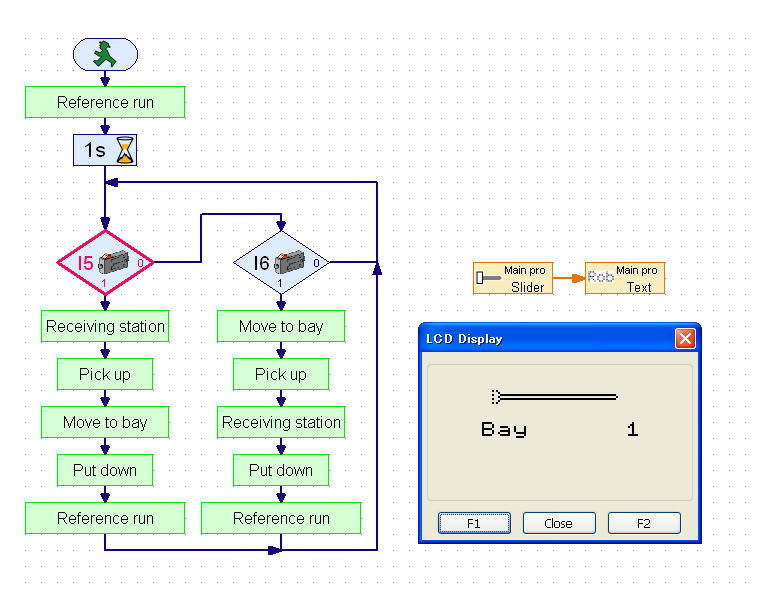
場所指定は次のようにプログラム上では「スライダー」を使って行います。

ただダウンロードを前提にする場合TXコントローラーのディスプレイに表示できるようにスライダーはTX Dislay上に作成します。(マニュアル TXコントローラー上の画面設定を参照)作成したプログラムをPC画面で動かすと次のようにLCD Displayが表示されますのでF1・ F2を長めに押すことでスライダーを動かし値を設定します。
次にプログラムをTXコントローラーにダウンロードした場合は「スライダー」が写真のようにディスプレイ画面に表示されますので左右の赤ボタンを長めに押すことでスライダーを動かして値を設定します。

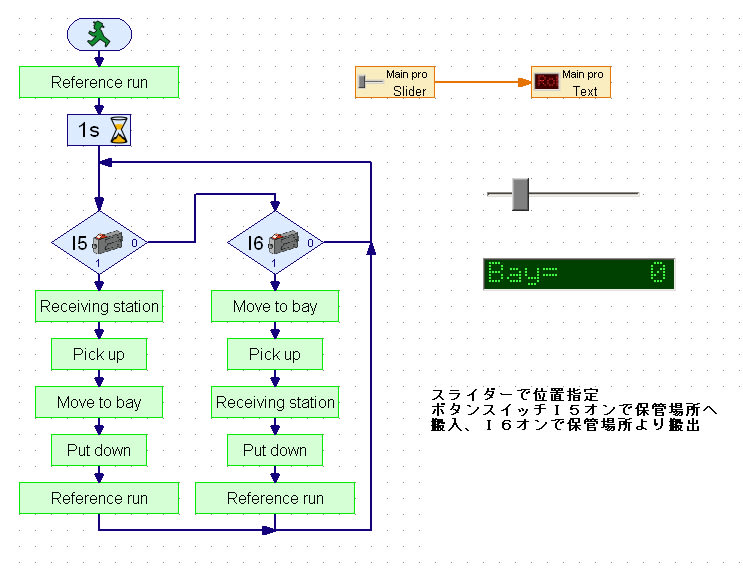
■PC画面からの無線操作
勿論bluetoothを使ってPC画面からロボットを無線操作するだけであれば従来通りの入出力要素を使ってスライダー・テキスト表示を利用してプログラムを作れば事足ります。その際はプログラムの画面表示は次のようになります。(但しこのプログラムはダウンロードしてもスライダーは表示されません。)
組立終えたロボットです。位置決めは実際に動かしながらエンコーダーの値を修正しています。

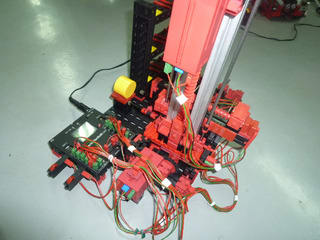
動きはここからご覧になれます。
■グリッパー回転型2軸ロボットの制作
次にグリッパーロボットを組み立てました。
グリッパーが90度回転するのでつかんだワークを縦置きにしたり横置きに変えたりすることができますから先日の搬入・搬出ロボットとセットにしてワークを所定位置に置いたり、所定位置のワークを回収したりするのに使えそうです。

実際に行ってみるとスペースが狭すぎてグリッパーをうまく回転させることができませんでした。
少し工夫がいりそうです。
サンプルプログラムによる単体の動きはここからご覧になれます。
本年度の新製品としてTXコントローラー対応の「Robo TX 産業用ロボットキット」が発売されました。
このキットで製作可能なモデルは4種類で
●グリッパーロボット
●ラック収納ロボット
●グリッパーが回転するロボット
●3軸ロボット
RoboTX automation robot
この中から自動倉庫型の「ラック収納ロボット」を組み立てて見ました。
■ラック収納ロボットの動作
これは自動倉庫ロボット或いは前回製作した「駐車場ロボット」の簡易版のようなロボットです。
ロボットの動作としては所定の位置にあるワークをフォークでピックアップしてプログラムで定められた1番から6番の収納位置にこれを搬入したり或いは逆に所定保管位置にあるワークをピックアップして搬出してきます。
■プログラムのダウンロードとディスプレイ表示
場所指定は次のようにプログラム上では「スライダー」を使って行います。
ただダウンロードを前提にする場合TXコントローラーのディスプレイに表示できるようにスライダーはTX Dislay上に作成します。(マニュアル TXコントローラー上の画面設定を参照)作成したプログラムをPC画面で動かすと次のようにLCD Displayが表示されますのでF1・ F2を長めに押すことでスライダーを動かし値を設定します。
次にプログラムをTXコントローラーにダウンロードした場合は「スライダー」が写真のようにディスプレイ画面に表示されますので左右の赤ボタンを長めに押すことでスライダーを動かして値を設定します。
■PC画面からの無線操作
勿論bluetoothを使ってPC画面からロボットを無線操作するだけであれば従来通りの入出力要素を使ってスライダー・テキスト表示を利用してプログラムを作れば事足ります。その際はプログラムの画面表示は次のようになります。(但しこのプログラムはダウンロードしてもスライダーは表示されません。)
組立終えたロボットです。位置決めは実際に動かしながらエンコーダーの値を修正しています。
動きはここからご覧になれます。
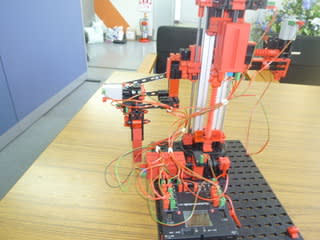
■グリッパー回転型2軸ロボットの制作
次にグリッパーロボットを組み立てました。
グリッパーが90度回転するのでつかんだワークを縦置きにしたり横置きに変えたりすることができますから先日の搬入・搬出ロボットとセットにしてワークを所定位置に置いたり、所定位置のワークを回収したりするのに使えそうです。
実際に行ってみるとスペースが狭すぎてグリッパーをうまく回転させることができませんでした。
少し工夫がいりそうです。
サンプルプログラムによる単体の動きはここからご覧になれます。






フィッシャーテクニックは数年前から興味があり、今回のTXシリーズは購入しようと考えております。
国内での取り扱いはいつごろからの予定でしょうか?