技術の発展学習キット
3年前に発売されたキットですが世の中の技術革新を推し進めた新技術についてそのモデルをブロックで組み立てながら技術の真髄が学習できるキットです。

内容的には
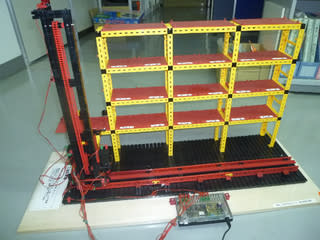
①安全エレベーターの開発に成功したオーティスの落下防止装置

②電動モーターの歴史とシーメンスの発電機


③ハインリヒ・フォッケのヘリコプターの発明
④メアリー・アンダーソンの発明した車のワイパー



⑤ジェームスワットの遠心調速機

⑥モールスの通信機

⑦カルダンシャフト

⑧永久機関

⑨オラス・ベネディクト・ソシュールによる毛髪湿度計

3年前に発売されたキットですが世の中の技術革新を推し進めた新技術についてそのモデルをブロックで組み立てながら技術の真髄が学習できるキットです。
内容的には
①安全エレベーターの開発に成功したオーティスの落下防止装置
②電動モーターの歴史とシーメンスの発電機
③ハインリヒ・フォッケのヘリコプターの発明
④メアリー・アンダーソンの発明した車のワイパー
⑤ジェームスワットの遠心調速機
⑥モールスの通信機
⑦カルダンシャフト
⑧永久機関
⑨オラス・ベネディクト・ソシュールによる毛髪湿度計















































































 摂氏温度14.6が表示されている
摂氏温度14.6が表示されている