








本年度の新製品Robotics TXT Discovery Set入荷
12月17日 発売が遅れておりましたTXT ContorollerとTXT Discovery Setがやっと入荷しました。

早速マニュアルの和訳を行うために実験を検証しながらその内容を確認しております。コントローラーの接続部は
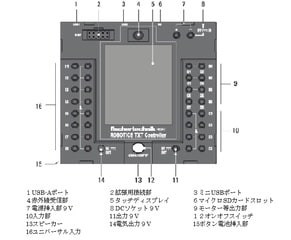
タッチ式のディスプレイ画面の内容は第一段階がプログラムスタートボタン(とスタート後のストップボタン)とFile画面・Setting画面・Test画面です。



それぞれのボタンを押すとFile,Setting,Testの詳細が表示され



更に次のレベルでFileのロード方法、Role,Network,LanguageのSetting方法、音声テストなどが設定できます。





コントローラーとPCとのWiFi接続はすでにWiFiアダプターが設置されWiFi通信ができる状態であればコントローラーの電源を入れるとft-TXTのアイコンが表示されますので接続をクリックすることで簡単に接続できます。

Bluetoothを使っての通信設定も簡単ですが画像の伝送処理を考えるとWiFiがおすすめとのことです。
次にディスカバリーセットのモデルの内ライン認識ロボット(Detection Robot)を組み立てて動かしてみた様子です。
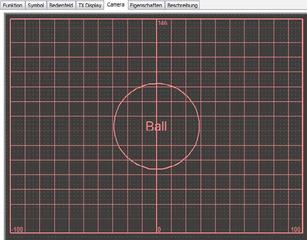
搭載のUSB Cameraには動きをとらえる4つの機能があります。
●Motion sensor機能、●Line sensor機能、●color sensor機能 ●Ball sensor機能
です。この機能によってカメラでとらえた画像から動きを制御できるようになっています。モーションセンサーでは画像内に動きがあるとそれをとらえ、ラインセンサーではラインの太さや位置を識別し、カラーセンサーでは色を識別し、ボールセンサーでは動きのあるサッカーボールを識別するわけです。

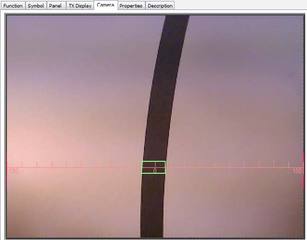
このDetection RobotではUSB Cameraがライン上の動きやラインの色やカードの色を識別しカメラに示したカラーボードの色と同じ色のラインを走行します。
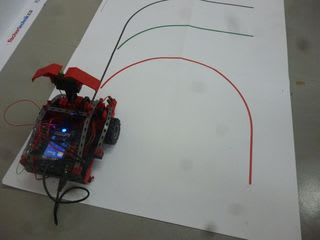
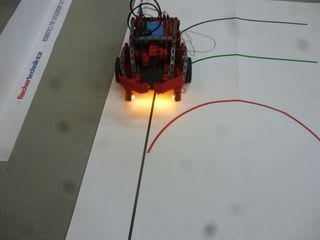
その動きです。
次にスマートフォンにGoogle PlaystoreからTXTCamdroidというアプリをダウンロードしてスマフォとコントローラーをWiFiで接続するとロボットがカメラで見ている画面がスマフォへ転送されスマフォからロボットの動きを制御できますとのことですが「TXTCamdroid」を検索しましたが見つかりませんのでまだアップロードされていないようです。

12月17日 発売が遅れておりましたTXT ContorollerとTXT Discovery Setがやっと入荷しました。
早速マニュアルの和訳を行うために実験を検証しながらその内容を確認しております。コントローラーの接続部は
タッチ式のディスプレイ画面の内容は第一段階がプログラムスタートボタン(とスタート後のストップボタン)とFile画面・Setting画面・Test画面です。
それぞれのボタンを押すとFile,Setting,Testの詳細が表示され
更に次のレベルでFileのロード方法、Role,Network,LanguageのSetting方法、音声テストなどが設定できます。
コントローラーとPCとのWiFi接続はすでにWiFiアダプターが設置されWiFi通信ができる状態であればコントローラーの電源を入れるとft-TXTのアイコンが表示されますので接続をクリックすることで簡単に接続できます。
Bluetoothを使っての通信設定も簡単ですが画像の伝送処理を考えるとWiFiがおすすめとのことです。
次にディスカバリーセットのモデルの内ライン認識ロボット(Detection Robot)を組み立てて動かしてみた様子です。
搭載のUSB Cameraには動きをとらえる4つの機能があります。
●Motion sensor機能、●Line sensor機能、●color sensor機能 ●Ball sensor機能
です。この機能によってカメラでとらえた画像から動きを制御できるようになっています。モーションセンサーでは画像内に動きがあるとそれをとらえ、ラインセンサーではラインの太さや位置を識別し、カラーセンサーでは色を識別し、ボールセンサーでは動きのあるサッカーボールを識別するわけです。
このDetection RobotではUSB Cameraがライン上の動きやラインの色やカードの色を識別しカメラに示したカラーボードの色と同じ色のラインを走行します。
その動きです。
次にスマートフォンにGoogle PlaystoreからTXTCamdroidというアプリをダウンロードしてスマフォとコントローラーをWiFiで接続するとロボットがカメラで見ている画面がスマフォへ転送されスマフォからロボットの動きを制御できますとのことですが「TXTCamdroid」を検索しましたが見つかりませんのでまだアップロードされていないようです。