








<はじめに>
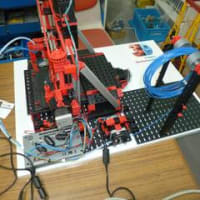
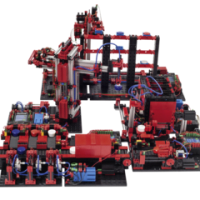
立体駐車場はパネル画面を使っていますのでプログラムをダウンロードしてインターフェイスのみで実行することはできません。パソコンをつないだ状態でないとパネルからの操作ができないからです。USBケーブルで接続できない距離にある場合は無線通信で実行するしかありません。無線通信の方法としては最近はBluetoothが用いれていますが「TXコントローラ」は対応していますが「Roboインタフェイス」は対応していません。しかしRoboインターフェイスの場合「RF Data Link」という通信モジュールを取り付けることでPC間との無線通信が可能です。


<使用方法>
このデーターリンクには2通りの使用方法があります。そのひとつは単に無線通信として使用する場合で1台のパソコンに3台のインターフェイスが接続可能です。もうひとつはインターフェイス間での通信です。

今回の立体駐車場の場合は最初の方法で離れたパソコンのパネル画面からリフトを動かしました。特別のプログラム変更等もありません。データーリンクに入っている受発信器をパソコンとUSBケーブルで接続し、他方回路基盤をインターフェイスに取り付ければよいだけです。無線通信の距離は10mですが途中に障害物があるとやはり電波が遮断されます。事務所内で4mほど離してもなんら支障なく駆動しました。

そして設定状況はInterface Testの中のInfoで内容を確認できます。

<同調>
インターフェイス相互間での通信が可能ということでこれにより2台のロボットを同調させて動かすことが可能になります。たとえばロボカップジュニアのダンス部門に参加するダンスロボットを動かすときには大変便利な機能です。
この方法を使ったダンスロボットの動きはここからご覧いただけます。
それぞれのインターフェイスにそれぞれのプログラムをダウンロードして動きを同調させます。そのためにプログラムの中に送信・受信機能を内蔵させる専用コマンド「送信コマンド」と「受信コマンド」がRoboproには用意されています。
<送信・受信コマンドの使い方>

このプログラムではRCN2(ラジオコールナンバー、電話番号のように発信元を特定する番号)からの発信SGを受信するとRCN1からの発信SLがありこれを受信するとモーター回転へとプログラムが進行します。通信はほとんど同時に行われますのでモーターの動きが同調するわけです。
ダンスロボットの男性の動きは次のようになっていますがその中てサブプログラムSYCを入れて女性の動きと新しい動きが始まる所で同調させています。

同調させるサブプログラムSYCの中身は単純に次のようになっています。


立体駐車場はパネル画面を使っていますのでプログラムをダウンロードしてインターフェイスのみで実行することはできません。パソコンをつないだ状態でないとパネルからの操作ができないからです。USBケーブルで接続できない距離にある場合は無線通信で実行するしかありません。無線通信の方法としては最近はBluetoothが用いれていますが「TXコントローラ」は対応していますが「Roboインタフェイス」は対応していません。しかしRoboインターフェイスの場合「RF Data Link」という通信モジュールを取り付けることでPC間との無線通信が可能です。
<使用方法>
このデーターリンクには2通りの使用方法があります。そのひとつは単に無線通信として使用する場合で1台のパソコンに3台のインターフェイスが接続可能です。もうひとつはインターフェイス間での通信です。
今回の立体駐車場の場合は最初の方法で離れたパソコンのパネル画面からリフトを動かしました。特別のプログラム変更等もありません。データーリンクに入っている受発信器をパソコンとUSBケーブルで接続し、他方回路基盤をインターフェイスに取り付ければよいだけです。無線通信の距離は10mですが途中に障害物があるとやはり電波が遮断されます。事務所内で4mほど離してもなんら支障なく駆動しました。
そして設定状況はInterface Testの中のInfoで内容を確認できます。
<同調>
インターフェイス相互間での通信が可能ということでこれにより2台のロボットを同調させて動かすことが可能になります。たとえばロボカップジュニアのダンス部門に参加するダンスロボットを動かすときには大変便利な機能です。
この方法を使ったダンスロボットの動きはここからご覧いただけます。
それぞれのインターフェイスにそれぞれのプログラムをダウンロードして動きを同調させます。そのためにプログラムの中に送信・受信機能を内蔵させる専用コマンド「送信コマンド」と「受信コマンド」がRoboproには用意されています。
<送信・受信コマンドの使い方>
このプログラムではRCN2(ラジオコールナンバー、電話番号のように発信元を特定する番号)からの発信SGを受信するとRCN1からの発信SLがありこれを受信するとモーター回転へとプログラムが進行します。通信はほとんど同時に行われますのでモーターの動きが同調するわけです。
ダンスロボットの男性の動きは次のようになっていますがその中てサブプログラムSYCを入れて女性の動きと新しい動きが始まる所で同調させています。
同調させるサブプログラムSYCの中身は単純に次のようになっています。






※コメント投稿者のブログIDはブログ作成者のみに通知されます