








Robo TX対応の空気圧ロボットキット
2012年の新製品 CP-30 RoboTX空気圧ロボットキットでは4種のモデルが組み立て可能です。

組立可能モデルは空気圧モーター・色別仕訳ロボット・真空ピックアップ機付ローラーコースターおよびピンボールゲーム機です。
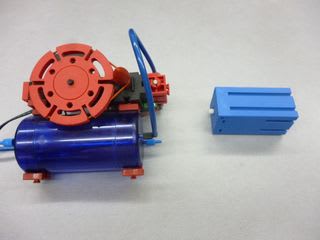
■新型コンプレッサーはパワーモーターサイズ
今年の新製品から使われだした小型コンプレッサーはパワーモーターと同じケースを使っておりサイズもずいぶん小さくなりました。従来のコンプレッサーはミニモーター・ピストン・逆流防止弁・エアータンクなどを組み合わせて組み立てていましたが今回からは単体となり大変コンパクトです。組み立ては簡単ですがメカがわからなくなりますね。
従来のコンプレッサーと並べてみました。

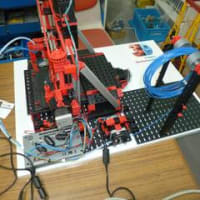
制作モデル1 ピンボールゲーム機
最後のピンボールゲーム機は左右のプッシュボタンでレバーを空気圧で操作して得点を競うゲーム機で実機と同じ感覚で遊ぶことができますのでまずこのゲーム機を組み立ててみました。
ピンボールの得点はフォトセンサーおよびカラーセンサーを使って通過回数および接近距離で得点が得られるようになっています。


ゲームは3球で行います。TXコントローラーの液晶画面に得点などが表示されるプログラムになっています。


簡単な動きは ここからご覧いただけます。
このキットの価格は税別28000円ですが空気圧ロボットキットですので本体以外にTXコントローラーが必要です。

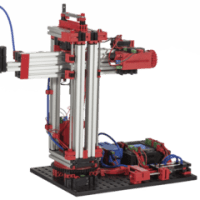
制作モデル2 真空吸着アームロボット
次に「真空吸い上げロボットアーム」の動きを紹介します。

動きは ここからご覧いただけます。
玉が2か所の到着点にたどり着くとセンサーで場所を感知してその位置にアームが移動し、玉を吸着して2か所の投入口に順次持っていって落としていきます。そして回転下降していずれかの停止場所にたどり着きまた場所を感知してアームが動き出すという内容です。サンプルプログラムでは真空吸着の時間が0.5秒になっていますがこれでは完全に吸着せずパチンコ玉が落ちたりしますので2秒にして完全に吸着できるようにしておりますので少し長く感じます。

2012年の新製品 CP-30 RoboTX空気圧ロボットキットでは4種のモデルが組み立て可能です。
組立可能モデルは空気圧モーター・色別仕訳ロボット・真空ピックアップ機付ローラーコースターおよびピンボールゲーム機です。
■新型コンプレッサーはパワーモーターサイズ
今年の新製品から使われだした小型コンプレッサーはパワーモーターと同じケースを使っておりサイズもずいぶん小さくなりました。従来のコンプレッサーはミニモーター・ピストン・逆流防止弁・エアータンクなどを組み合わせて組み立てていましたが今回からは単体となり大変コンパクトです。組み立ては簡単ですがメカがわからなくなりますね。
従来のコンプレッサーと並べてみました。
制作モデル1 ピンボールゲーム機
最後のピンボールゲーム機は左右のプッシュボタンでレバーを空気圧で操作して得点を競うゲーム機で実機と同じ感覚で遊ぶことができますのでまずこのゲーム機を組み立ててみました。
ピンボールの得点はフォトセンサーおよびカラーセンサーを使って通過回数および接近距離で得点が得られるようになっています。
ゲームは3球で行います。TXコントローラーの液晶画面に得点などが表示されるプログラムになっています。
簡単な動きは ここからご覧いただけます。
このキットの価格は税別28000円ですが空気圧ロボットキットですので本体以外にTXコントローラーが必要です。
制作モデル2 真空吸着アームロボット
次に「真空吸い上げロボットアーム」の動きを紹介します。
動きは ここからご覧いただけます。
玉が2か所の到着点にたどり着くとセンサーで場所を感知してその位置にアームが移動し、玉を吸着して2か所の投入口に順次持っていって落としていきます。そして回転下降していずれかの停止場所にたどり着きまた場所を感知してアームが動き出すという内容です。サンプルプログラムでは真空吸着の時間が0.5秒になっていますがこれでは完全に吸着せずパチンコ玉が落ちたりしますので2秒にして完全に吸着できるようにしておりますので少し長く感じます。






※コメント投稿者のブログIDはブログ作成者のみに通知されます