








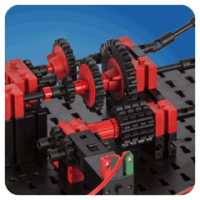
フィッシャーテクニックではロボットの発売当初(1990年代)はモーターの回転制御にスリット板とフォトインターラプタを組み合わせて行っておりました。その後90年代後半から4枚歯のパルス歯車とリミットスイッチを組み合わせたパルスカウンター方式になりました。


回転で発生するパルスをカウントして何回転で停止するかをプログラムすることでモーターの回転を制御してきました。そしてそれ専用のコマンドも作られています。

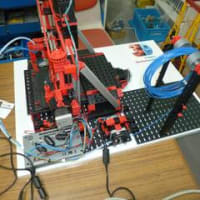
例えば簡単な溶接ロボットのプログラムは次のようになっています。

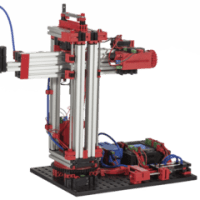
また比較ブロックを使って目標回転パルスになるまで回転させるプログラムはつぎのようになります。このプログラムは産業ロボットなどで多用しています。

そしてRoboインターフェイスでの制御はこの方式になります。当然ミニモーターでもパワーモーターでも利用できます。
そして今回TXコントローラーの発売に合わせてTXコントローラー専用のエンコーダーモーターが発売されモーターの回転制御方法も新しくなりました。接続方法はモーターの電源は従来どおりM1からM4を使用し、エンコーダーの信号はパルスカウンターのC1からC4で読み取られます。エンコーダー電源は9Vの+に差し込みます。


モーターに内蔵するエンコーダーのパルス数とTXコントローラーのパルスカウンターを使って位置決めを行うもので物理的に読み取る従来型に比して格段に精度が高くなりました。また2台のモーターを同調させることが出来ることによりロボットの走行などが正確に行えるようになりました。(この点が一番のメリットでしょう)
尚エンコーダーモーターの性能ですがモーター1回転が75パルスです。(減速ギア比が25:1で、エンコーダーは1回転に3ですので25×3=75)そしてRoboproに専用のコマンドが用意されました。

プロパティウインドウからモーターを1個使用か、2個同調使用か、距離も同調かとか回転方向・回転速度・パルス数を簡単に設定できます。実際の使用では「入力待ちブロック」や「分岐ブロック」とセットして使用します。それぞれのブロックのプロパティのM1EからM4Eのモーター番号を選択するとそのモーターが目標回転数に達するとその信号が送られます。

次はこのコマンドを使った四角形を走行するプログラムです。(直角に曲がるパルス数245は実際に行いながら修正)


回転で発生するパルスをカウントして何回転で停止するかをプログラムすることでモーターの回転を制御してきました。そしてそれ専用のコマンドも作られています。
例えば簡単な溶接ロボットのプログラムは次のようになっています。
また比較ブロックを使って目標回転パルスになるまで回転させるプログラムはつぎのようになります。このプログラムは産業ロボットなどで多用しています。
そしてRoboインターフェイスでの制御はこの方式になります。当然ミニモーターでもパワーモーターでも利用できます。
そして今回TXコントローラーの発売に合わせてTXコントローラー専用のエンコーダーモーターが発売されモーターの回転制御方法も新しくなりました。接続方法はモーターの電源は従来どおりM1からM4を使用し、エンコーダーの信号はパルスカウンターのC1からC4で読み取られます。エンコーダー電源は9Vの+に差し込みます。
モーターに内蔵するエンコーダーのパルス数とTXコントローラーのパルスカウンターを使って位置決めを行うもので物理的に読み取る従来型に比して格段に精度が高くなりました。また2台のモーターを同調させることが出来ることによりロボットの走行などが正確に行えるようになりました。(この点が一番のメリットでしょう)
尚エンコーダーモーターの性能ですがモーター1回転が75パルスです。(減速ギア比が25:1で、エンコーダーは1回転に3ですので25×3=75)そしてRoboproに専用のコマンドが用意されました。
プロパティウインドウからモーターを1個使用か、2個同調使用か、距離も同調かとか回転方向・回転速度・パルス数を簡単に設定できます。実際の使用では「入力待ちブロック」や「分岐ブロック」とセットして使用します。それぞれのブロックのプロパティのM1EからM4Eのモーター番号を選択するとそのモーターが目標回転数に達するとその信号が送られます。
次はこのコマンドを使った四角形を走行するプログラムです。(直角に曲がるパルス数245は実際に行いながら修正)






※コメント投稿者のブログIDはブログ作成者のみに通知されます